1
Изобретение относится к области ноляризационно-оптинеских измерений, в частности к объективным измерениям оптической разности хода, например, при исследовании механических напряжений с использованием явления фотоупругости.
Известны способы определения целого числа порядков оптической разности хода, по которому определяют дробную часть порядков с помощью компенсатора Сенармона в монохроматическом свете, затем в пучок белого света вводят дополнительный компенсатор, например кварцевый клин, а затем производят коррекцию найденного целого числа порядков по измеренной дробной части порядков.
При определении целого числа порядков известным способом в результат вносится погрешность, возникающая за счет неодинаковости дисперсий дополнительного компенсатора и образца.
С целью повышения точности определения целого числа порядков оптической разности хода по предлагаемому способу одновременно с введением дополнительного компенсатора непрерывно доворачивают компенсатор Сенармона до положения, при котором происходит совпадение или смена взаимного положения минимальных интенсивностей для двух или более монохроматических потоков, прощедших объект, а коррекцию целого числа порядков
производят по соотнощению положений дополнительного компенсатора и компенсатора Сенармона.
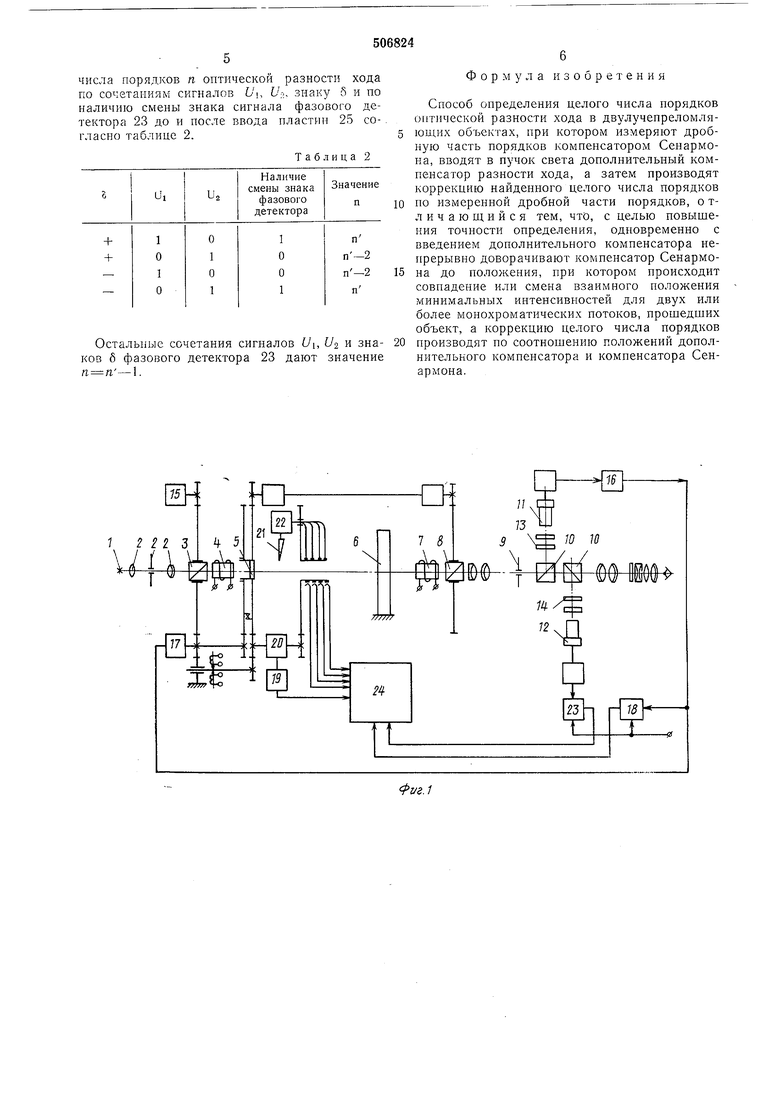
На фиг. 1 представлена схема устройства с
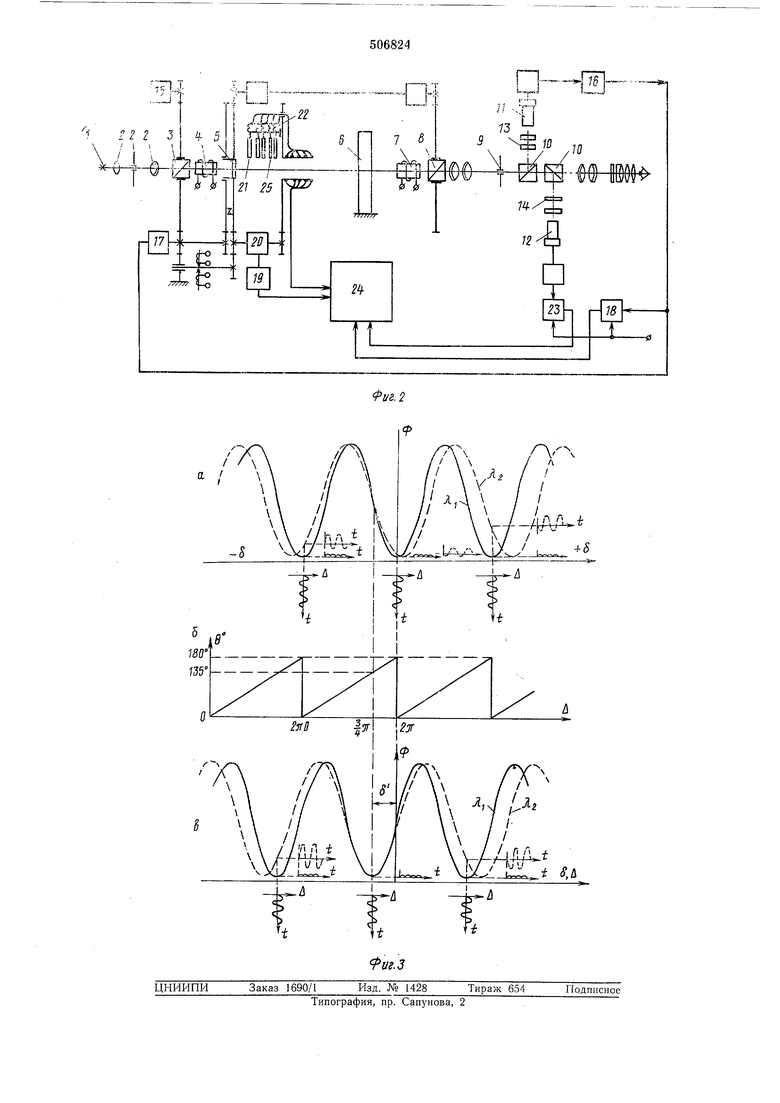
дополнительным компенсатором разности хода в виде кварцевого клина (Бабине-Солейля) и т. д.), иллюстрирующая предлагаемый способ; на фиг. 2 - схема устройства с дополнительным компенсатором разности хода в виде
фазовых волновых пластин; на фиг. 3,а - кривые зависимости светового потока Ф от разности хода б для двух длин волн Я, и (,2 и
эффект наложения вынужденных колебаний на нараметр разности фаз А в момент окончания комненсации только разности хода для монохроматического пучка света с длпмо волны ., когда имеется существенная разниц.а дисперсии двойного лучепреломления материалов объекта и компенсатора; на
фиг. 3,6 - зависимость требуемого угла поворота компенсатора Сенармона от требуемой разности фаз А для достижения минимальной интенсивности монохроматического пучка света ч; на фиг. 3,6 - кривые Ф fб, Л для двух
монохроматических пучков света Ki и KZ но окончании одновременной компенсации разности хода б и разности фаз А, т. е. эффект от ввода в пучок света кварцевого клина с одновременным доворотом компенсатора Сенармона.
Световой поток от источника I света попадает на формирователь 2 и в виде параллельного пучка света проходит поляризатор 3, модулятор 4 Фарадея, четвертьволновую пластинку 5, исследуемый объект 6, модулятор 7 Фарадея, анализатор 8, диафрагму 9 и делитель 10 света, направляясь на два фотоприемника II и 12. Перед фотоприемником 11 установлен фильтр 13 с максимумом пропускания на длине волны им, а перед фотоприемннком 12 - фильтр 14 с максимумом пропускания на длине волны 2 578 нм.
Определение целого числа порядков оптической разности хода производят следующим образом.
Скрещенные поляризатор 3, анализатор 8 вместе с четвертьволновой пластинкой 5, быстрая ось которой совпадает с плоскостью пропускания поляризатора, поворачивают в диагональное положение (под 45°) по отношению к главным осям исследуемой точки объекта 6.
Поворачивают поляризатор 3 относительно заторможенной (зафиксированной) вместе С анализатором 8 четвертьволновой пластинки 5 до наступления минимальной интенсивности света с длиной волны Яь т. е. до исчезновения первой гармоники переменной составляющей фотоприемника 11.
Датчиком 15 фиксируют угол поворота поляризатора 3 (компенсатора Сенармона), который характеризует внесенную разность фаз Д и соответствует дробной части порядка разности хода |. Кроме того, датчик 15 формирует два вида сигналов Ui и U2. Сигнал Ui действует при повороте поляризатора 3 на угол , а сигнал Us - при повороте поляризатора 3 на угол по отношению к заторможенной четвертьволновой пластинке 5. Поляризатор 3 с помощью следящей системы (усилитель 16, двигатель 17) удерживают в положении минимума интенсивности света с длиной волны XiПо полярности сигнала от фазового детектора 18 определяют знак разности хода б. Двигателем 19 и дифференциалом 20 устанавливают дополнительный грубый компенсатор 21 разности хода «на вычитание, т. е. в такое положение, при котором главные оси объекта G и компенсатора 21 взаимно перпендикулярны.
В пучок света вводят компенсатор 21 разности хода при помощи датчика 22 линейных перемещений привода, при этом одновременно непрерывно доворачивают следящей системой компенсатор Сенармона (поляризатор 3) в положение минимума интенсивности для монохроматического пучка света с длиной волны нм, т. е. в положение, при котором в спектре сигнала фотоприемника 11 отсутствует первая гармоника частоты возбуждения модулятора 4 Фарадея. Одновременный ввод компенсатора разности хода в пучок света и доворот компенсатора Сенармона производят до совпадения или смены взаимного положения минимальных интенсивностей для обоих
монохроматических пучков света /ч и Лз, попадающих на фотоприемники 11, 12, что контролируется фазовыми детекторами 18, 23 и логическим устройством 24 по фазе переменных составляющих сигналов фотоприемников 11, 12.
Измеренное целое число порядков п оптической разности хода дополнительным компенсатором соответствует показаниям датчика 22 линейных перемещений привода клина или числу введенных фазовых пластин. При движении клина датчик 22 линейных перемещений привода формирует сигналы U и U, возникающие при перемещении клина каждый раз на величину, соответствующую изменению разности хода в пределах каждого порядка 0( и соответственно.
Затем производят коррекцию найденного целого числа порядков оптической разности хода по измерениям дробной части порядков, проводнвщихся компенсатором 21 Сенармона до начала ввода последнего, причем в случае использования компенсатора разности хода в виде кварцевого клина сущность коррекции найденного целого числа порядков п и заключается в определении истинного значения числа порядков п, оптической разности хода по сочетаниям сигналов U, Uz, Vz, U и по знаку б согласно таблицы 1.
Таблица 1
Остальные сочетания сигналов U, Uz, f/з,
U и знак б дают значение .
В случае использования в качестве компенсатора разности хода фазовых волновых пластинок после определения момента окончания компенсации разности хода перед корректировкой производят дополнительное (контрольное) изменение разности хода на величину, превышающую сумму ожидаемых ошибок компенсатора и ошибок из-за разницы дисперсий 0,6% в диапазоне ±8 порядков, т. е. на величину б ;
путем поочередного ввода в
пучок света фазовых пластин 25 с взаимно перпендикулярными оптическими осями, при этом продолжают доворачивать компенсатор Сенармона в положение минимума света.
Сущность коррекции найденного целого числа порядков я оптической разности хода заключается в определении истинного значения числа порядков я оптической разности хода по сочетаниям сктЕалов U, И:,, знаку б и по наличию смены знака сигнала фазового детектора 23 до и после ввода пластин 25 согласно таблице 2. Таблица 2 Остальные сочетания сигналов Ll, Uz и знаков б фазового детектора 23 дают значение . Формула изобретения Способ определения целого числа порядков оптической разности хода в двулучепреломляющих объектах, при котором измеряют дробную часть порядков компепсатором Сенармона, вводят в пучок света дополнительный компенсатор разности хода, а затем производят коррекцию найденного целого числа порядков по измеренной дробной части порядков, о тличающийся тем, что, с целью повышения точности определепия, одновременно с введением дополнительного компенсатора непрерывно доворачивают компенсатор Сенармона до положения, при котором происходит совпадение или смена взаимного положения минимальных интенсивностей для двух или более монохроматических потоков, прошедших объект, а коррекцию целого числа порядков производят по соотношению положений дополнительного компенсатора и компенсатора Сенармона.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения целых порядков интерференции поляризованных лучей | 1978 |
|
SU789689A1 |
| Поляриметр | 1971 |
|
SU488121A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОПТИЧЕСКОЙ РАЗНОСТИ ХОДА МЕТОДОМ СЕНАРМОНА | 1971 |
|
SU322747A1 |
| Устройство для контроля толщины кристаллических пластин в процессе доводки | 1987 |
|
SU1479823A2 |
| СПОСОБ ИЗМЕРЕНИЯ ВЕЛИЧИНЫ ДВУЛУЧЕПРЕЛОМЛЕНИЯ ЗАРЕЦКОГО | 1991 |
|
RU2046315C1 |
| ПОЛЯРИМЕТРФОНД ^*!епЕРШ j | 1973 |
|
SU385206A1 |
| СПОСОБ ИЗМЕРЕНИЯ КОНЦЕНТРАЦИИ ОПТИЧЕСКИ АКТИВНЫХ ВЕЩЕСТВ В МУТНЫХ РАСТВОРАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2325630C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПОЛНОЙ РАЗНОСТИ ФАЗ СВЕТА | 1991 |
|
RU2014576C1 |
| Способ измерения двойного лучепреломления веществ | 1991 |
|
SU1818545A1 |
| Устройство для измерения давлений | 1983 |
|
SU1150503A1 |
21 3 I , | J.,M -I) / / .-™,j i,j
