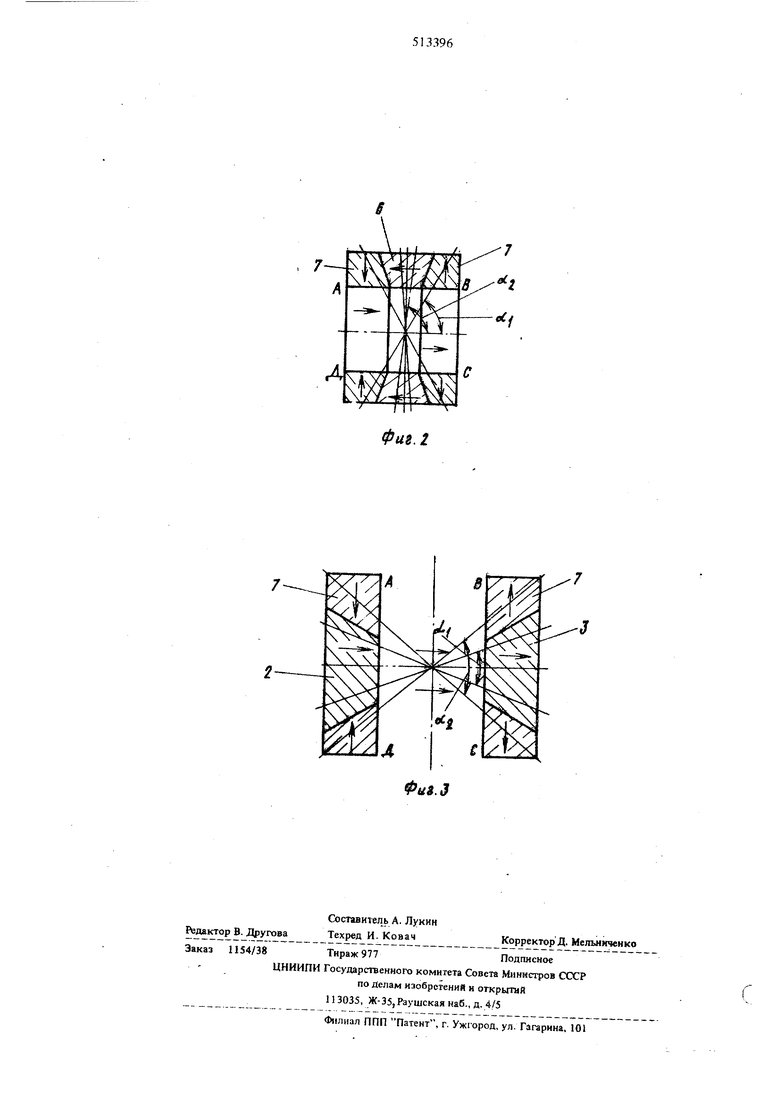
(54) МАГНИТНАЯ СИСТЕМА Наивыспше параметры системы достигаются, когда поверхность стыка магнитов имеет форму конуса с углом раствора 2 (А. На фиг. 1- изображена предлагаемая мапштная система. (Чрелками показано направление намагничивания элементов - радиальное и аксиальное, Л, В, С, Д г)аницы рабочего зазора системы,ct,- угол межлу осью системы и внутренним конусом, OL - угол межд осью системы и внептим конусом. Магнитная система (фиг. 1) состоит из магнитов I-.3, намагниченных аксиально и магнитов 4.5 намагниченных радиа.1ьно. Система может быть вынолнена (фиг.2) из аксиального намагниченного колыш 6 и раяиально намагни |чен11ых колен 7, причем направление намагничивания кольпа 6 противоположно направлению поля в зазоре системы. В системе, изображенной на фиг. 3, направление цамгпничивания аксиально намагниченных магнитов :пипадает с направлением поля в зазоре. Об1ней особенностью изображенных на фиг. 1-3 магнитных систем является то, что поверхность стыка мапгитов имеет форму конуса с углом раствора 2с- , определенным по формуле (1), для случая аксиально и радиал1 но намагниченных деталей из одинакового материала. В случае, когда стыкуемые дегали намагничены рашшльно и вдоль направления нолл зазора (фиг. 1, 3) 2с1«58 36 , в случае, когда они намагничены раяиально и против направления поля |)азора (фиг. 1, 2) 2с 148°36., . Поскольку при небольншх отклонениях от приведе ных значений 2 Л эффективность системы существенно не меняется, а также,исходя из технологических соображений, допускается разметцение поверхности стыка ннутри конусов с углами раствора 2cti j3 , причем форма этой поверхности существенной роли не играет: она может быть цилиндрической, ступенчатой и т.д важно лишь, чтобы значение Jb было яо возможности меньше. Эффективность систем может быть повышена при цополнительном использовании деталей, намагничен ность которых занимает промежуточное положение по отношению к аксиальной и радиальной.
иг. 1 Предлагаемые магнитные системы позволяют уменъ-: нгить массу маг нитов в 2-3 раза при сохранетти задан ного значения напряженности поля в рабочем зазоре, без измене}гия уровня рассеяния. Они предназначены для бортовой аппаратуры спецназначения, где перво степенную роль играют вес и габариты. Кроме того, П1ирокое внедрение их в производство позволит вдвое снизить расход дорогостоящих сплавов. Формула изобретения 1. Магнитная система, состоящая из магнитол с различным направлением намагничинаемости, о т л и ающаяся тем, что, с целью усиления поля в (зазоре, больния часть (более половины) площади поверхности ра:эдела магнитов расположена в секторе между двумя соосными конусами, ось которых совпадает с осью системы, верцтины - с центром симметрии, а углы раствора конусов равны соответственно гс1±р,где ,20, C OLXctg )т )т 1 1 1 2 г а . СЬ Н)тп Н)ш 111 г г г Т ,m -аксиальная и радиальная координаты едияичного вектора, указывающего направление намагничивания магнита, В ,Н -остаточная индукция и коэрцитивная сиН с, ла (по индукции) его материала, t. 1,2 - индексы рассматриваемых стыкуемых магнитов. 2. Система по п. I, отличающаяся тем, что, с целью дальнейшей оптимизации, раздел магнитов происходит по конической пйверхности с углом раствора 2о(..
Фиг.г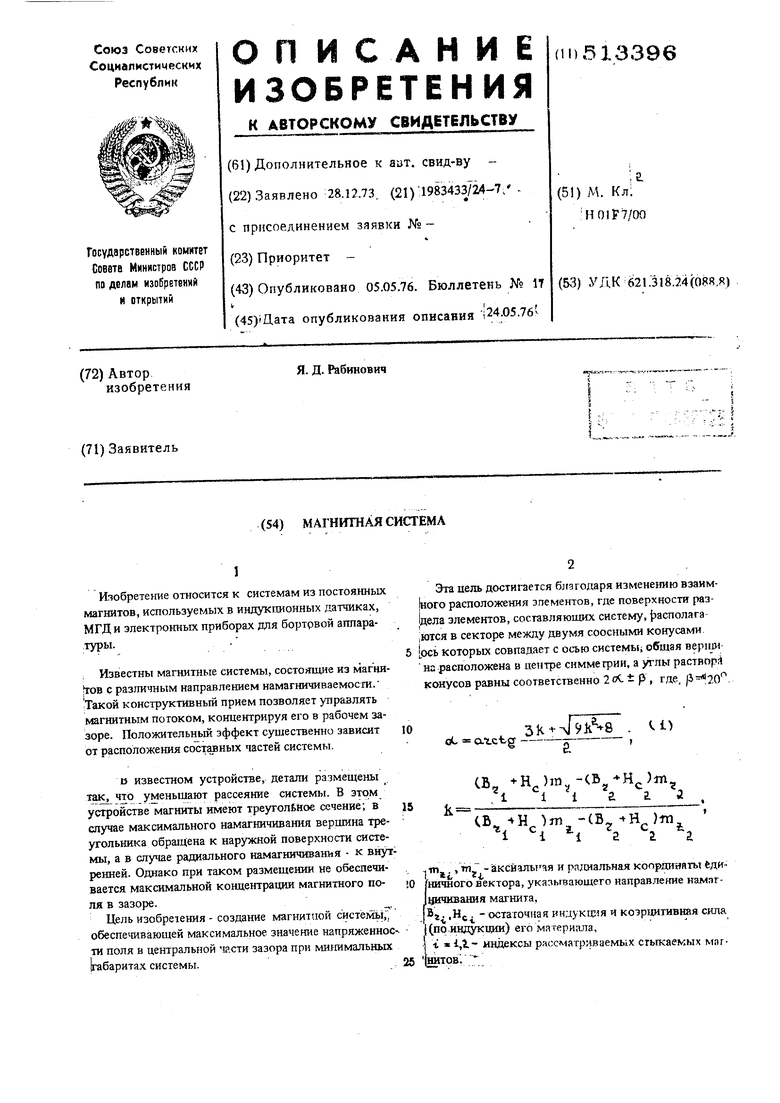

| название | год | авторы | номер документа |
|---|---|---|---|
| Магнитная фокусирующая система | 1978 |
|
SU769660A1 |
| СКВАЖИННЫЙ ШТАНГОВЫЙ НАСОС | 2004 |
|
RU2289037C2 |
| УСТРОЙСТВО ДЛЯ МАГНИТНОЙ ОБРАБОТКИ ЖИДКОСТИ | 2003 |
|
RU2242433C1 |
| Радиально-упорный магнитный подшипник | 2019 |
|
RU2714055C1 |
| Магнитная система | 1979 |
|
SU786675A1 |
| Магнитоэлектрический измерительный механизм | 1988 |
|
SU1636776A1 |
| СПОСОБ КАРОТАЖА С ИСПОЛЬЗОВАНИЕМ ЯДЕРНО-МАГНИТНОГО РЕЗОНАНСА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2367982C1 |
| БЕСКОНТАКТНЫЙ ДАТЧИК УГЛОВОГО ПОЛОЖЕНИЯ ВАЛА | 2005 |
|
RU2378613C2 |
| РАДИАЛЬНО-АКСИАЛЬНЫЙ ПОДШИПНИК | 1999 |
|
RU2176039C2 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2021 |
|
RU2770789C1 |