Изобретение относится к аналоговой вычислительной технике и может быть использовано при реилении ряда задач аэрогидродинамики, в частности при исследовании пространственного ноступательно-циркуляционпого обтекапия тел.
Известно устройство для моделирования трехмерных гидроаэродипамическпх нолей, содержащее генераторы напряжения, блок управления, соединенный с первым входом коммутатора, группа входов которого подключена к измерительным датчикам, установлепным в магнитной камере, обмотка которой соединена с соответств}ЮЩим выходом первого генератора напряжения, и блок усилителей мощности, выходами подключенный к входам блока контроля циркуляции. Первый выход блока контроля цирку/шции связан с вторым входом коммутатора, а другие выходы - с электродами моделирования вихревой пелены, установленными на выходящих кромках исследуемой модели из электропроводного материала, размещенной в магнитной камере. Кроме того, в усгройство введены контролирующие датчики, расположенные на выходящих кромках исследуемой модели, и регистрирующий блок, выход которого подключен к блоку вывода информации.
Цель изобретения - иовышенне точности моделирования..
Это достигается тем, что устройство содержит усилитель папряжения, связанный с выходом коммутатора, соединенные по входа.м )i подключенные к выходу усилителя напряжения синхронные детекторы, к другим входам которых подсоединены соответствующие выходы генераторов напряжения, первый синхронный коммутатор, входам подключенный к контролирующим датчикам, а выходом - к третьему входу коммутатора, и последовательно соединенные су.мматор, входы которого подключены к выходам синхронных детекторов, функциональный преобразователь, второй синхронный коммутатор и блок регуляторов. Другой вход блока регуляторов соединен с соответствующим выходом второго генератора напряжения, выходы блока регуляторов с входами блока усилителей мощности, а второй выход сумматора - с входом регистрирующего блока.
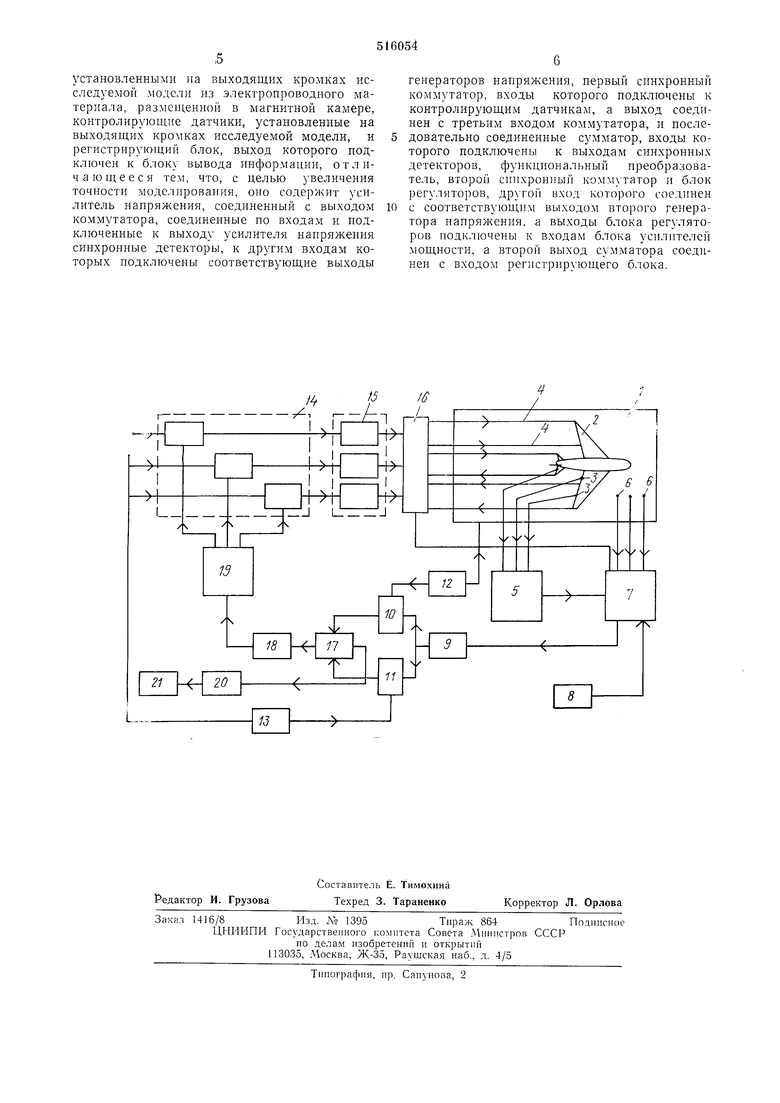
Па чертеже представлена блок-схема устройства.
В магнитной камере 1 установлена .модель 2 с контролирующими датчиками 3 и прикрепленными к выходящим кромкам ее электродами 4 моделирования вихревой пелены за телом. Контролирующие датчики подсоединены к входам первого синхронного авто.матического коммутатора 5, а его выход или выходы измерительных датчиков 6 через коммутатор 7, управляемый блоком 8 управления, могут соединяться с входом усилителя 9 наиряжения. К выходу усилителя ианряжсния подключеиы параллельно входы синхронных детекторов 10, 11, причем к второму входу синхронного детектора 10 нодсоедипс первый . выход генератора 12 напряжения, вторым выходом связанного с обмоткой магнитной камеры, а к второму входу детектора И - первый выход генератора 13 напряжения, на второй вход которого подключеиы параллельно выходы блока регуляторов 14. Выходы этих же регуляторов по элементно подсоединены к входам усилителей 15 моодности, а, в свою очередь, к выходам усилителей мощности через блок 16 контроля циркуляции - электроды 4 моделирования вихревой пелены.
На выходы синхронных детекторов 10 и 11 нодключен сумматор 17, один из выходов которого соединен с функциональным преобразователем 18, а его выход может поочередно подключаться на выходы регуляторов 14 при помощи второго синхронного автоматического коммутатора 19, синхронно работающего с синхронным коммутатором 5. К второму выходу сумматора 17 подсоединен регистрирующий блок 20, к выходу блока 20 - блок 21 вывода ииформации в виде печатающего устройства или в виде преобразователя сигнала для ввода его непосредственно в ЭЦВМ.
Работает устройство следующим образо1М.
Обмотка магнитной камеры 1 иолучает питание от генератора 12 (28 кгц). Проводники с током, ирикреиленные к выходя1цим кромкам модели 2 и и.митирующие вихревую нелену за телом, нолучают питание через блок 16 контроля циркуляции от усилителей 15 мощности, сигнал на входы которых подается через регуляторы 14 амплитуды от генератора 13 (30 кгц).
При согласовании поступательного и циркуляциониого нолей в точках размещения контролирующих датчиков сигналы рассогласования этих датчиков в виде переменной э.д.с. от суммы двух полей разных частот (28 и 30 кгц) поступают па входы синхронного автоматического коммутатора 5 и далее через коммутатор 7, управляемый блоком 8 на вход усилителя 9 напряжения. Усиленный усилителем сигнал проходит на входы синхронных детекторов 10 и 11, причем детектор 10 управляется сигналом от генератора 12, а детектор 11 - от генератора 13. Суммарный сигнал постоянного тока от обоих детекторов выделяется на сумматоре 17. Далее это напрял ;ение подается на преобразователь 18, который преобразует постоянное напряжение в напряжение для привода регуляторов 14. По регуляторам сигнал распределяется при помощи синхронного автоматического коммутатора 19, синхронно работающего с автоматическим коммутатором 5. Воздействуя на регуляторы 14, сигнал изменяет подаваемое от генератора 13 напряжения на усилители 15 мощности, тем самым изменяя ток но амплитуде на выходе каждого из этих усилителей, т. е. и электродах 4 моделирования шгхревой нелепы. Ток в ппх изменяется до I-QX нор, пока амплитуды обоих магнитных полей в точке установки контролирующего датчика не выравпиваются.
Автоматические комлптаторы, аботая LMiiLxpoHHo, переключают по очереди датчики и соответст 5у1ои1,ие им регуляторы до тех нор,
пока во всех точках, где установлены контролируюпгие датчики, не будет достигнуто равенство амплитуд обоих полей. Скорость нереключепия синхронных автоматических коммутаторов определяется временем отработки одного регулятора до полного выравнивания амплитуд нолей в соответствующей точке. После согласования полей синхронные автоматические коммутаторы отключаются. Теперь приступают непосредствепно к спятию
аэрогидродинамических характеристик исслед емого тела, для чего проводят замеры величии токов в электродах 4 ири помощи блока 16 контро.гя циркуляции. Затем измеряют индукцию магнитных нолей (являющуюся
аналогом скорости потока) в необходимых точках на модели и в окружающем ее пространстве при иомощи измерительпых датчиков 6. Все измерения проводят по следующей схеме: сигналы с измерительных датчиков в
виде суммы э.д.с. двух частот или с блока 16 в виде э.д.с. одной частоты подключаются к входу усилителей 9, сили1Ш1Отся им и поступают на синхроииые детекторы 10 и 11. На сумматоре 17 сигнал измеряется регистр 1ру1ощим блоком 20 и;|и результат измерения может быть отпечатан на бумаге блоком вывода информации с печатающим устройством. Предлагаемое устройство позволяет получать значения сил и моментов сил, действующих на тело при различиях режимах обтекания тел, минуя громоздкие промежуточные расчеты, базирукмциеся на измерении скорости по всей поверхности модели. Кроме того,
оно обеспечивает переход к регнению более сложных задач, недоступных ранее из-за большого объема вычислений, и тем самым расширение класса решаемых задач.
Фор м у л а и 3 о б р е т е н и я
Устройство для моделирования трехмерных гидроаэродинамических полей, содержащее генераторы напряжения, блок управлеПИЯ, соединенный с первым входом коммутатора, группа входов которого подключена к измерительным датчикам, установленным в магнитной камере, обмотка которой соединена с соответствующим выходом первого гецератора напряжения, блок усилителей мощности, выходы которого подключены к входам блока контроля циркуляции, первый вы.ход которого соединен с вторым входом коммутатора, а другие выходы соединены с электродами моделирования вихревой пелены, установленными на выходящих кромках исследуемой модели из электропроводного материала, размен1енной в магнитной камере, контролирующие датчики, установленные на выходящих кромках исследуемой модели, и регистрирующий блок, выход которого подключен к блоку вывода информании, отличающееся тем, что, с целью увеличения точности моделирования, оно содержит усилитель напряжения, соединенный с выходом коммутатора, соединенные по входам и подключенные к выходу усилителя напряжения синхронные детекторы, к другим входам которых подключены соответствующие выходы генераторов напряжения, первый синхронный коммутатор, входы которого подключены к контролирующим датчикам, а выход соединен с третьим входом коммутатора, и последовательно соединенные сумматор, входы которого подключены к выходам синхронных детекторов, функциональный нреобразователь, второй синхронный i OMMvraTop и блок регуляторов, другой вход которого соединен с соответствующим выходом второго генератора напряжения, а выходы блока регуляторов подключены к входам блока уснлите.чей мощности, а второй выход сумматора соединен с входом регистрирующего блока.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования потока жидкости и газа | 1985 |
|
SU1251115A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ТРЕХМЕРНЫХ ПОСТУПАТЕЛЬНО-ЦИРКУЛЯЦИОННЫХ ПОТОКОВ | 1971 |
|
SU305487A1 |
| Электромагнитное устройство для моделирования трехмерных циркуляционных потоков | 1973 |
|
SU487400A1 |
| Устройство для исследования трехмерных циркуляционных гидроаэродинамических полей | 1986 |
|
SU1336053A1 |
| Устройство для моделирования обтекания транспортных средств | 1985 |
|
SU1285498A1 |
| Устройство для моделирования плоских полей | 1974 |
|
SU492888A1 |
| Устройство для моделирования трехмерных полей | 1979 |
|
SU767787A1 |
| Устройство для решения задач аэрогидромеханики | 1985 |
|
SU1350657A1 |
| Устройство для моделирования двухмерных полей | 1975 |
|
SU560239A1 |
| УСТРОЙСТВО для МОДЕЛИРОВАНИЯ ДВУХМЕРНЫХ | 1973 |
|
SU389522A1 |
