(54) М,АНИПУЛЯТОР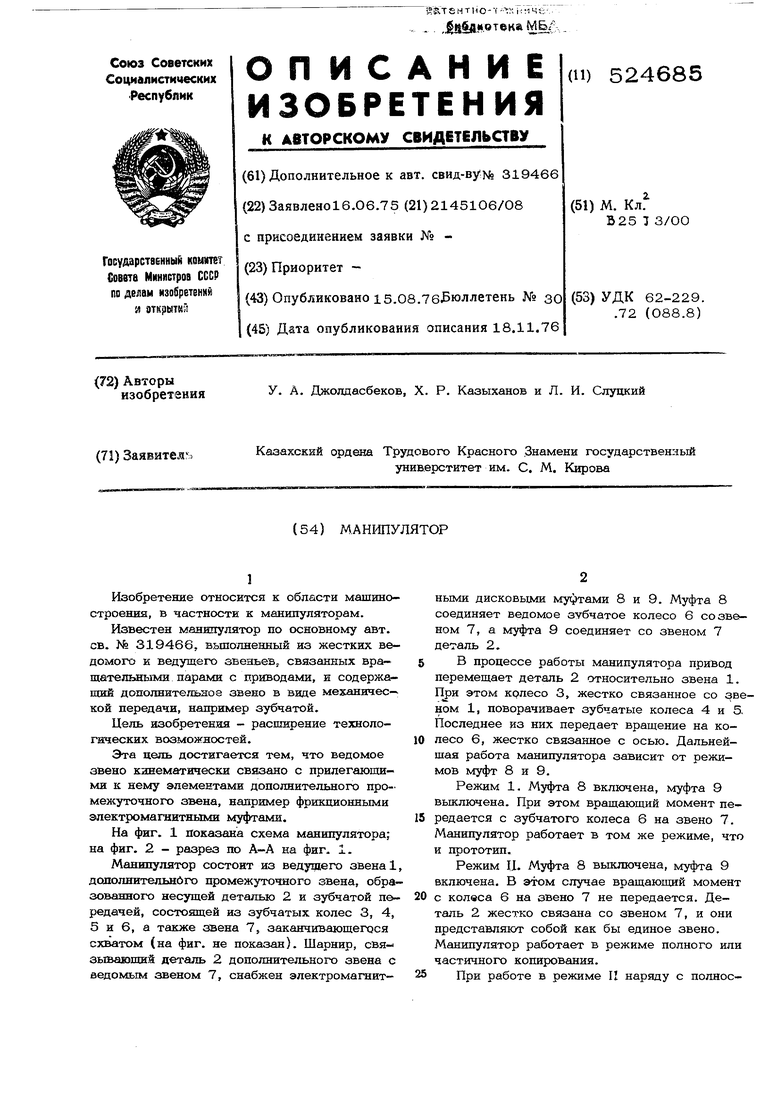
| название | год | авторы | номер документа |
|---|---|---|---|
| СОЕДИНИТЕЛЬНО-ТРАНСФОРМИРУЮЩЕЕ УСТРОЙСТВО КОМБИНИРОВАННОЙ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2606652C1 |
| САМОБЛОКИРУЮЩИЙСЯ ДИФФЕРЕНЦИАЛ КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 1999 |
|
RU2162974C2 |
| ТРАНСМИССИЯ ГУСЕНИЧНОЙ МАШИНЫ | 1991 |
|
RU2031808C1 |
| ТРАНСМИССИЯ ГУСЕНИЧНОЙ МАШИНЫ | 2005 |
|
RU2297926C1 |
| ВАРИАТОРНЫЙ ПРИВОД МОБИЛЬНОЙ МАШИНЫ | 2002 |
|
RU2205110C1 |
| ТРАНСМИССИЯ ГУСЕНИЧНОЙ МАШИНЫ С ЦЕНТРАЛЬНОЙ СОСТАВНОЙ КОРОБКОЙ ПЕРЕДАЧ | 2010 |
|
RU2438908C1 |
| РЕКУПЕРАТИВНАЯ МЕХАНИЧЕСКАЯ САМОРЕГУЛИРУЕМАЯ БЕССТУПЕНЧАТАЯ ПЕРЕДАЧА С МАХОВИЧНЫМ НАКОПИТЕЛЕМ ЭНЕРГИИ | 2004 |
|
RU2261385C1 |
| МНОГОДИАПАЗОННАЯ ТРЕХПОТОЧНАЯ БЕССТУПЕНЧАТАЯ ТРАНСМИССИЯ НА ОСНОВЕ ПЯТИЗВЕННОГО ДИФФЕРЕНЦИАЛЬНОГО МЕХАНИЗМА | 2014 |
|
RU2554922C1 |
| Трансмиссия транспортного средства | 1990 |
|
SU1766720A2 |
| ЗУБЧАТО - ИМПУЛЬСНЫЙ ВАРИАТОР | 2016 |
|
RU2636440C2 |
1
Изобретение относится к области машиностроения, в частности к манипуляторам.
Известен манипулятор по основному авт. св. № 319466, вьшолненный из жестких ведомого к ведущего звеньев, связанных вращательными парами с приводами, и содержащий дополнительное звено в виде механичес кой передачи, например зубчатой.
Цель изобретения - расширение технологических возможностей.
Эта цель достигается тем, что ведомое звено кинематически связано с прилегающими к нему элементами дополнительного промежуточного звена, например фрикционными электромагнитными муфтами.
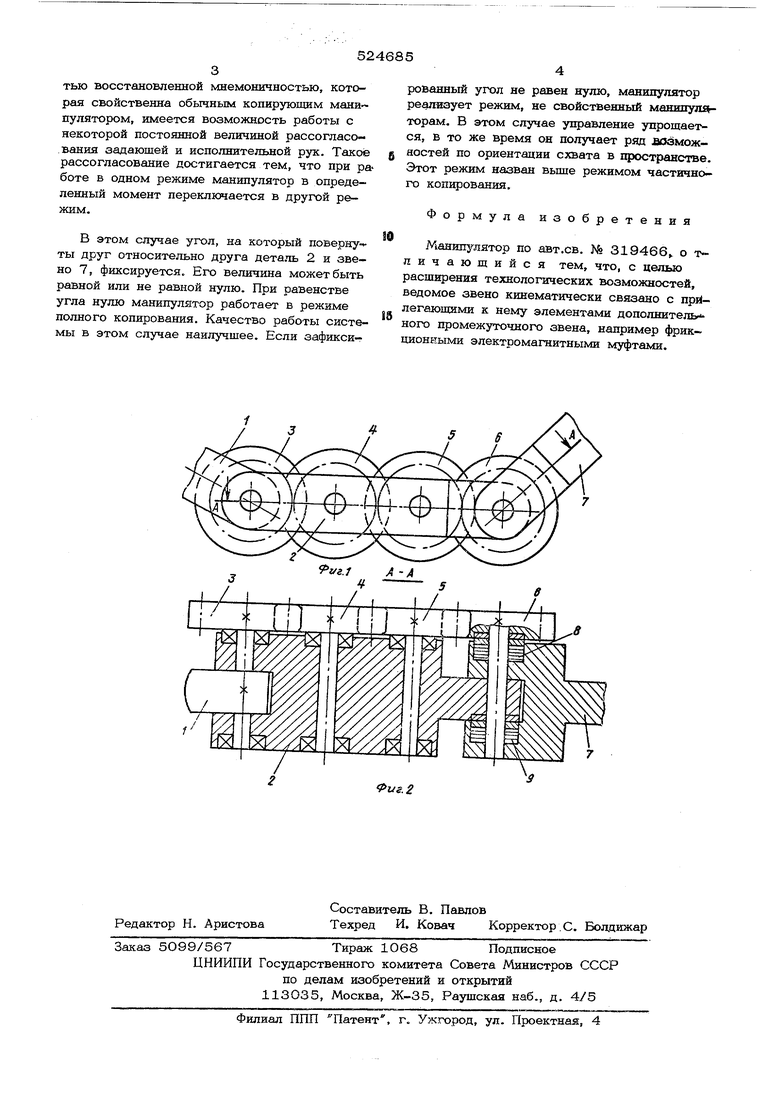
На фиг. 1 показана схема манипулятора; на фиг, 2 - разрез по А-А на фиг. 1.
Манипулятор состоит из ведущего звена 1 дополнительнбго промежуточного звена, образованного несущей деталью 2 и зубчатой передачей, состоящей из зубчатых колес 3, 4, 5 и 6, а также звена 7, заканчивающегося охватом (на фиг. не показан). Шарнир, связьшающий деталь 2 дополнительного звена с ведомым звеном 7, снабжен электромагнит-
ными дисковыми муфтами 8 и 9. Муфта 8 соединяет ведомое зубчатое колесо 6 со звеном 7, а муфта 9 соединяет со звеном 7 деталь 2.
В процессе работы манипулятора привод перемещает деталь 2 относительно звена 1. При этом колесо 3, жестко связанное со звеном 1, поворачивает зубчатые колеса 4 и 5. Последнее из них передает вращение на колесо Q, жестко связанное с осью. Дальнейшая работа манипулятора зависит от режимов муфт 8 и 9.
Режим 1. Муфта 8 включена, муфта 9 вьпслючена. При этом вращающий момент передается с зубчатого колеса 6 на звено 7. Манипулятор работает в том же режиме, что и прототип.
Режим II. Муфта 8 выключена, муфта 9 включена. В этом случае вращающий момент с колеса 6 на звено 7 не передается. Деталь 2 жестко связана со звеном 7, и они представляют собой как бы единое звено. Манипулятор работает в режиме полного или частичного копирования.
При работе в режиме II наряду с полное-
t
тью восстановленной ллаемоничностью, которая свойственна обычным копирующим манипулятором, имеется возможность работы с некоторой постоянной величиной рассогласования задаюшей и исполнительной рук. TaKoie рассогласование достигается тем, что при работе в одном режиме манипулятор в определенный момент переключается в другой режим.
В этом случае угол, на который повернуты друг относительно друга деталь 2 и звено 7, фиксируется. Его величина может быть равной или не равной нулю. При равенстве угла нулю манипулятор работает в режиме полного копирования. Качество работы системы в этом случае наилучшее. Если зафиксированный угол не равен нулю, манипулятор реализует режим, не свойственный манипуляторам, В этом случае управление упрощается, в то же время он получает ряд Озможностей по ориентации схвата в пространстве. Этот режим назван вьпне режимом частичного копирования.
Формула изобретения
Манипулятор по авт.св. № 319466 о тличающийся тем, что, с целью расширения технологических возможностей, ведомое звено кинематически связано с прилегающими к нему элементами дополнитель ного промежуточного звена, например фрикционными электромагнитными муфтами.
J
Фие.2
