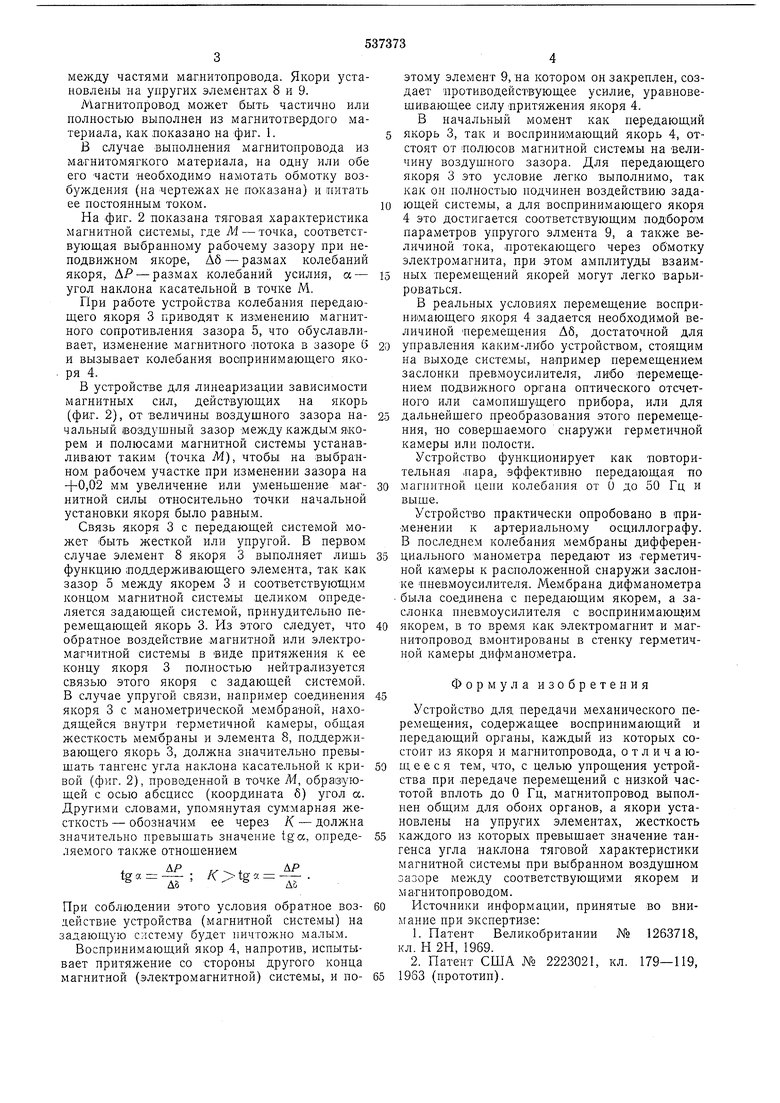
между частями маг.нитопровода. Якори установлены на упругих элементах 8 и 9. Магнитопровод может быть частично или нолностью выполнен из магнитотвердого материала, как показано на фиг. 1. В случае выполнения магнитопровода из магнитомягкого материала, на одну или обе его части -необходимо намотать обмотку возбуждения (па чертежах ке показана) и питать ее постоянным током. На фиг. 2 показана тя-говая характеристика магнитной системы, где М - точка, соответствующая выбранному рабочему зазору при неподвижном якоре, Аб - размах колебаний якоря, ДР--размах колебаний усилия, а- угол наклона касательной в точке М. При работе устройства колебания передающего якоря 3 приводят к изменению магнитного сопротивления зазора 5, что обуславливает, изменение магнитного лотока в зазоре 6 и вызывает колебания воспринимающего якоВ устройстве для линеаризации зависимости магнитных сил, действующих на якорь (фиг. 2), от величины воздущного зазора начальный воздушный зазор между каждым якорем и полюсами магнитной системы устанавливают таким (точка М), чтобы на выбравном рабочем участке при изменении зазора на -j-0,02 мм увеличение или уменьшение магниткой силы относительно точки начальной установки якоря было равным. Связь якоря 3 с передающей системой может быть жесткой или упругой. В первом случае элемент 8 якоря 3 выполняет лишь функцию поддерживающего элемента, так как зазор 5 между якорем 3 и соответствующим концом магнитной системы целиком определяется задающей системой, принудительно перемещающей якорь 3. Из этого следует, что обратное воздействие магнитной или электромагнитной системы в виде притяжения к ее концу якоря 3 полностью нейтрализуется связью этого якоря с задающей системой. В случае упругой связи, например соединения якоря 3 с манометрической мембраной, находящейся внутри герметичной камеры, общая жесткость мембраны и элемента 8, поддерживающего якорь 3, должна значительно превышать тангенс угла наклона касательной к кривой (фиг. 2), проведенной в точке М, образующей с осью абсцисс (координата б) угол а. Другими словами, упомянутая суммарная жесткость - обозначим ее через К - должна значительно превышать значение tga, определяемого также отношением ,ЛР - tg я - ; /( tg а При соблюдении этого условия обратное воздействие устройства (магнитной системы) на задающую систему будет ничтожно малым. Воспринимающий якор 4, напротив, испытывает притяжение со стороны другого конца магнитной (электромагнитной) системы, и поэтому элемент 9, на котором он закреплен, создает Противодействующее усилие, уравновешивающее силу притяжения якоря 4. В начальный момент как передающий якорь 3, так и воспринимающий якорь 4, отстоят от ПОЛЮСОВ магнитной системы на величину воздушного зазора. Для передающего якоря 3 это условие легко выполнимо, так как он полностью подчинен воздействию задающей системы, а для воспринимающего якоря 4 это достигается соответствующим подбором параметров упругого элмента 9, а также величиной тока, протекающего через обмотку электро.магнита, при этом амплитуды взаимных перемещений якорей могут легко варьироваться. В реальных условиях перемещение восприниадающего якоря 4 задается необходимой величиной перемещения А5, достаточной для управления каким-либо устройством, стоящим на выходе систе.мы, например перемещением заслонки превмоусилителя, либо перемещением подвижного органа оптического отсчетного или самопищущего прибора, или для дальнейшего преобразования этого перемещения, но совершаемого снаружи герметичной камеры или полости. Устройство функционирует как повторительная .пара,, эффективно передающая по магнитной цепи колебания от О до 50 Гц и выше. Устройство практически опробовано в применении к артериальному осциллографу. В последнем колебания мембраны дифференциального манометра передают из герметичной камеры к расположенной снаружи заслонке пневмоусилителя. Мембрана дифманометра была соединена с передающим якорем, а заслонка пневмоусилителя с воспринимающим якоре.м, в то время как электромагнит и магнитопровод вмонтированы в стенку герметичной камеры дифманометра. Формула изобретения Устройство для передачи механического перемещения, содержащее воспринимающий и передающий органы, каждый из которых состоит из якоря и магнитопровода, отличающееся тем, что, с целью упрощения устройства при передаче перемещений с низкой частотой вплоть до О Гц, Магнитопровод выполнен общим для обоих органов, а якори установлены на упругих элементах, жесткость каждого из которых превышает значение тангенса угла наклона тяговой характеристики магнитной системы при выбранном воздушном зазоре между соответствующими якорем и магнитопроводом. Источники информации, принятые во внимание при экспертизе: 1.Патент Великобритании № 1263718, кл. Н 2Н, 1969. 2.Патент США № 2223021, кл. 179-119, 1963 (прототип).
Задающая систеаа
| название | год | авторы | номер документа |
|---|---|---|---|
| ПНЕВМАТИЧЕСКИЙ КОМПЕНСАЦИОННЫЙ ДИФФЕРЕНЦИАЛЬНЫЙ МАНОМЕТР | 1967 |
|
SU191853A1 |
| Электропневматический аналоговыйпРЕОбРАзОВАТЕль | 1978 |
|
SU808728A1 |
| СПОСОБ ВОЗБУЖДЕНИЯ СЕЙСМИЧЕСКИХ ВОЛН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2302016C1 |
| ПНЕВМОУСИЛИТЕЛЬ ТОРМОЗНОГО ПРИВОДА С НИЗКИМ УРОВНЕМ ШУМА | 2004 |
|
RU2344950C2 |
| Электромагнитный вибратор | 1988 |
|
SU1598064A1 |
| ЭЛЕКТРОМАГНИТНЫЙ ВИБРАТОР | 2004 |
|
RU2256514C1 |
| ПНЕВМОРАСПРЕДЕЛИТЕЛЬ | 1999 |
|
RU2164633C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКОЕ УСТРОЙСТВО | 2017 |
|
RU2653607C1 |
| УРОВНЕМЕР ЦЕПНОЙ ПОПЛАВКОВЫЙ | 1994 |
|
RU2117919C1 |
| ИМПУЛЬСНЫЙ МАГНИТОЭЛЕКТРИЧЕСКИЙ ГЕНЕРАТОР | 1997 |
|
RU2122177C1 |

