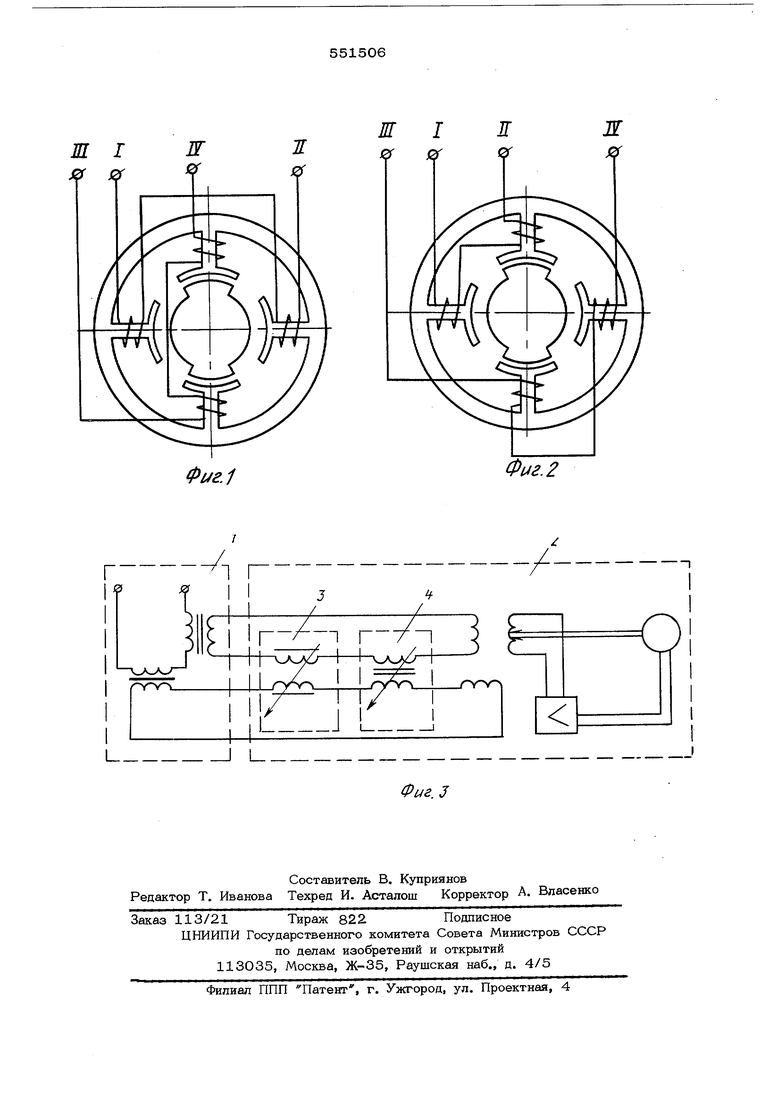
Индуктивное сопротивление обмоток I-II и III-1Y ко шенсатора 1 определяется маг нитным сопротивлением для намагничивающих сил обмоток, т, а. положением зубцов ротора относительно осей обмоток. Если ось зубцов ротора расположена под 45 к полюсам статора, то ивдуктивные сопротивления обмоток 1-11 wlIl-lVpaBны, и ассиметрии цепей синхронизации меж ду индукционным датчиком и СКТ-приемни ком не создается. При положении оси зубцов ротора по оси обмотки П1- IV индуктивное сопротивление ее возрастает, а ток намагничивания ум шается, что приводит к повороту вектора суммарной намагничивающей силы в плоскости СКТ-приемника компаса, изменяющемуся от курса по закону синуса. Знак синусной составляющей четвертной девиации определяется положением оси зуб цов ротора относительно осей обмоток 1-Й и 111-IVВ устройстве для компенсации косинусной составляющей четвертной девиации в силу последовательного и встречного по потоку намагничивания включения обмоток на соседних полюсах величина и знак тра формированной ЭДС из цепи синхронизации с большим ее значением в цепь с меньшим значением определяются положением оси зубцов ротора относительно осей обмоток статора. При положении оси зубцов ротора под углом 45 к осям обмоток индуктивности всех обмоток будут равны, а травсформиро ванные ЭДС второй гармоники в обмотках одной фазы будут равны и сдвинуты по фазе на ISO и компенсируют друг друга. Положение вектора суммарной намагничивающей силы в плоскости СКТ в этом CTiyчае не изменяется при включении компенсатора. Если ось зубцов ротора совпадает с осью полюсов пакета статора, то индуктивные сопротивления обмоток по этой оси будут максимальными, падения напряжения второй гармоники на них тоже максимальные и косинусная составляющая четвертной девиации, знак которой определяется включением обмоток в цепи синхронизации, также будет максимальна. Так как индуктивные сопротивления обмоток по другой оси малы, трансформированная составляющая ЭДС второй гармоники этих обмоток, фаза которой сдвнщ та на 18О относительно трансформированной ЭДС обмоток по другой оси, только уменьшит величину косинусной составляющей четвертной девиации. При повороте ротора на 90 знак косинусной составляющей четвертной девиации изменится на противопо-. ложный. Компенсация полукруговой девиации компаса производится известными средствами. Формула изобретения Устройство для компенсации четвертной девиации датчика магнитного курса, содержащее два идентичных четырехполюсных элемента с четырьмя распределенными обмотками на статоре и с вращающимися ассимет- ричными роторами, отличающеес я тем, что, с целью повышения точности, надежности и упрощения процесса компенсации девиаций на самолете, обмотки на диаметрально расположенных полюсах статора одного из четырехполюсных элементов соединены последовательно согласно потоку намагничивания, а диаметрально противоположные обмотки полюсов статора другого элемента соединены с обмотками соседних полюсов введенной в датчик магнитного курса цепи синхронизации встречно потоку намагничивания.
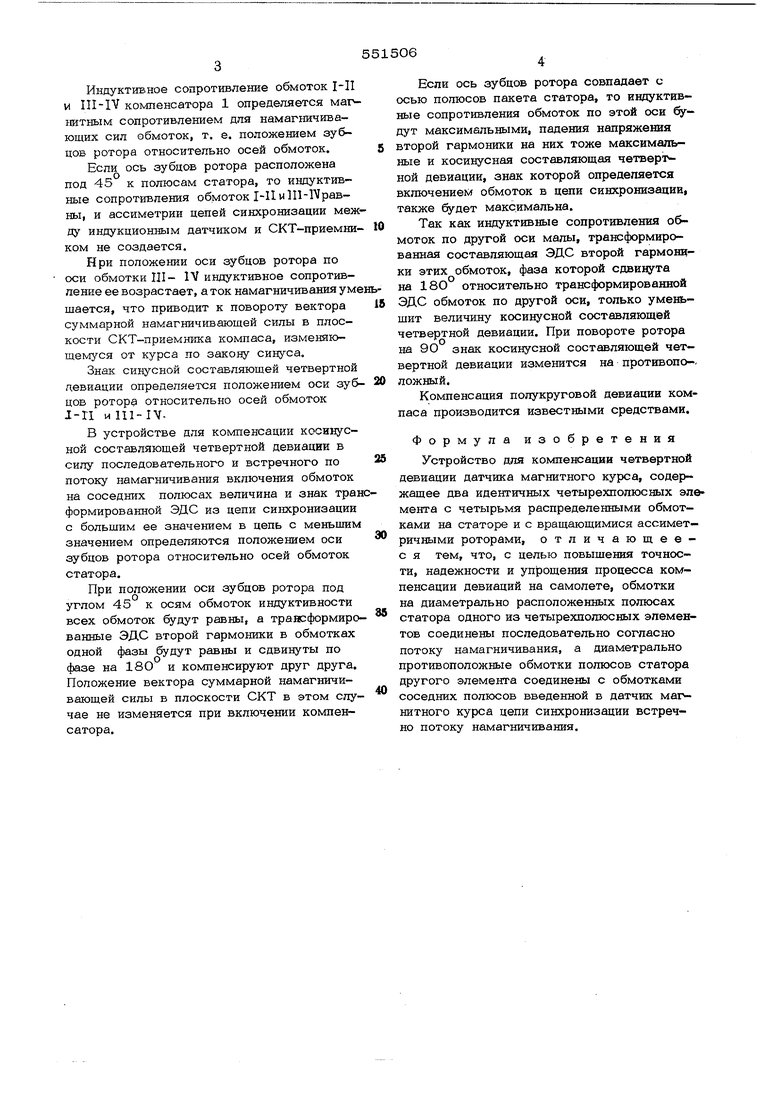
Фиг.1
.2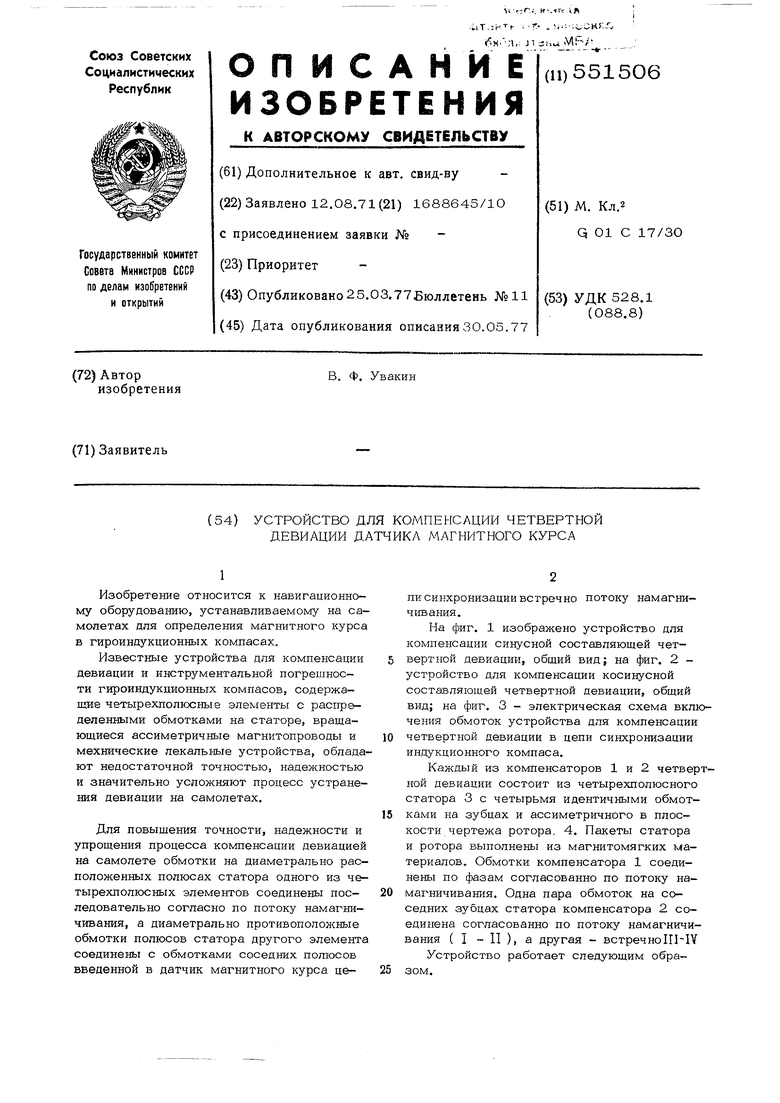
| название | год | авторы | номер документа |
|---|---|---|---|
| СИЙУСНО-КОСИНУСМЬШ ПРЕОБРАЗОВАТЕЛЬ | 1971 |
|
SU316110A1 |
| МАГНИТНЫЙ КОМПАС | 2008 |
|
RU2364835C1 |
| Устройство для измерения магнитного курса | 1978 |
|
SU769329A1 |
| Многополюсный вращающийся трансформатор | 1981 |
|
SU1001343A1 |
| ИНДУКЦИОННЫЙ КОМПАСПйiEЙTiiч-:^^•^^•БИБЛИО'. ^НА ^^J | 1972 |
|
SU339780A1 |
| Асинхронно-синхронный преобразователь частоты | 1974 |
|
SU692017A1 |
| Индукционный редуктосин | 1990 |
|
SU1798865A1 |
| Синхронный электродвигатель с электромагнитным возбуждением | 1985 |
|
SU1325629A1 |
| Двухканальный вращающийся трансформатор | 1987 |
|
SU1432674A1 |
| ИНДУКТОРНАЯ МАШИНА | 2010 |
|
RU2422971C1 |
J L I
Фиг.З rW
