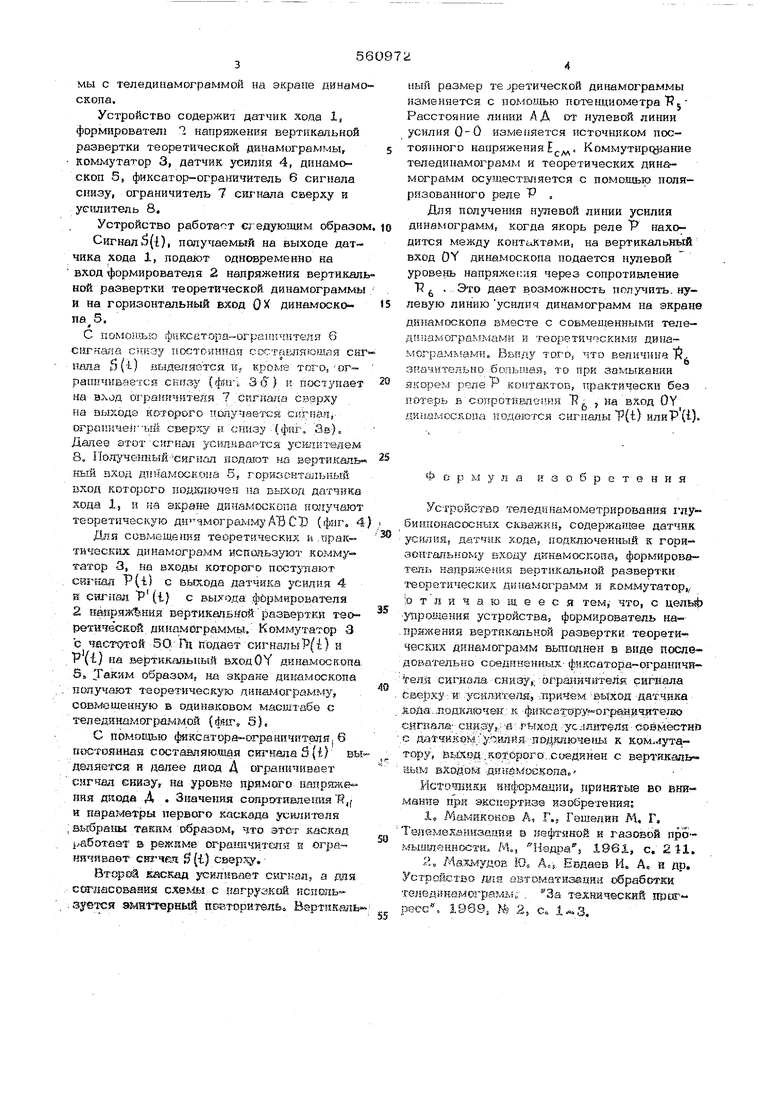
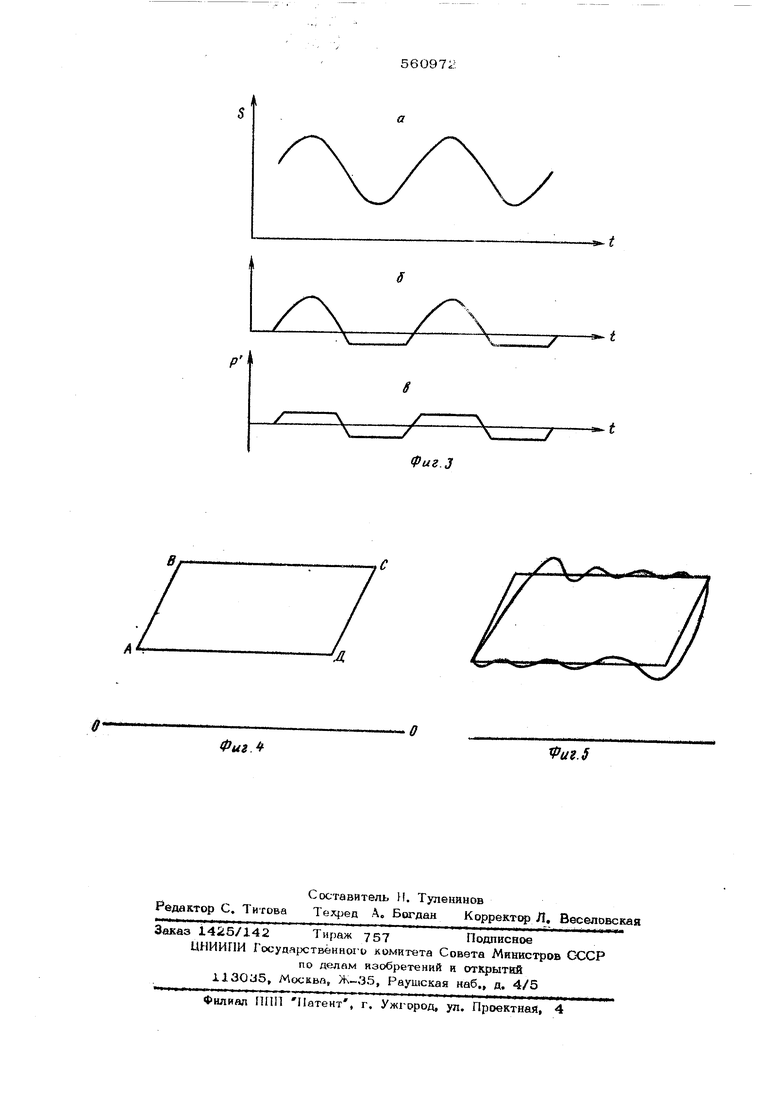
(54) УСТРОЙСТВО ТЕЛЕДИНАМОМЕТРИРОВАНИЯ ГЛУБИННОНАСОСНЫХ CKBAAl-IH мы с теледиЕшмограммой на экране динам скопа. Устройство содержит датчик хода 1, формировател 1 напршкения вертикальной развертки теоретической динамограммы, коммутатор 3, датчик усилия 4, динамоскоп 5, фиксатор-ограничитель 6 сигнала снизу, ограничитель 7 сигнапа сверху и усилитель 8. Устройство работает с;:ейуюшим образо Сигнал b{i), получаемый на выходе датчика хода 1, подают одновременно на вход х})ормирователя 2 напряжения вертикал ной развертки теоретической динaмoгpaм ш и на горизонтальный вход Qi динамоскопа 5, С помогаьк) фйксатора-ограп.1чктеля 6 CHrhasa снизу постоянная состашгающая сн шша S(t) выдел5 ется и, тфоме того,-or™ рагаппшаегся снизу (. -Зб) к поступает на вход о1ра Гйчктеля 7 .Спгйапа сверху на выхода которого получаете; ;. снгнаП; ограниченьш сверху и снизу (фаг, Зв), Цаяее этот сигнал усилнвартся усшип-елем 8. По, -сйгнап подают на вертикаль гаш вход дтгнамоекспш -5, гориосктаньный вход которого поджиочен па выход датчика хода 1, и на экране динамсч копа получаю теоретическую ди -змогр& - муА 6С1) (фиг. Дня совлющеиня TeopeTH4ecKvsx и .практических динамограмм испачьзуют ко.мму татор 3, На входы которого поступают . сйгггал P(iJ с выхода датчика усилия 4 н сзгнал Р (i) с выхода .формирователя 2 щщ яжЪняя вертика Бйой развертки таоретиШСЕой. динамеграммы. Коммутатор 3 с чаетот-ой 50. Ли кьдавт сигналь P(-i) и Р() па sepTKKafibHbtft входОУ ткаиоскопа В, Таким образом, на экране днкамоскола .получают теоретическую диншлограмму, совмещенную в одинаковом масил-абе с телед.5 намогршямой (фаг, S), С помощью фйксе тора ограничителя. 6 гиютоянная состаапяю.щая cш н&laЗ{i) вы дел яе-гся н далее диод Д ограниншеет сигнал снизу, на уровне прямого вагфш-кеПИЯ дкода Д . Значения сопротивления T,f и параметры первого каскада усш-пггелн ; вьгбраны таким образом, что этот каскад работает и режвме ограш1ЧйТ8Л51 к огравяч5шавт сшчкд 0(i) ceepjjy. Второй 1шс.кад уекливает сйгкал, а шж . ссзгласоваяий cxe.to с гшгруакой ислвль : зуется аыйгтерньй пг«торигель« Вертикаль ный размер те Jpeтичecкoй динамограммы изменяется с помощью потенциометра 7 jРасстояние АД от нулевой линии усилия О-О изменяется источником постоянного напряжения Е|,,д. Коммутирс ание телединамограмм и теоретических динамограмм осуществгшется с помо.щью поляризованного реле Р , Для получения нулевой линии усилия динамограмм, когда якорь реле Р находится между контактами, на вертикальный вход OV динамоскопа подается нулевой уровень напряжения через сопротивление R .Это дает возможность получить, нулевую линию усилия динамограмм на экране динамоскопа вместе с совмен1енными телеьMSiuaMorpraMMiiMK и теоретическими динамсграмыами. Ввиду тогО; что вепичииа к значительно бсгньшая, то при замыкании якорем реле Р .контактов, праг-стически без потерь в сопроткш1.еп.ии Т па вход OY диыамсс&опа подаются снггшлы P(t) илиР(). о Р м у л а и 3 о б Р е т о н и я Устройство ге..пединамометрировайия 1лубиинонасосных скважин, содержагцее датчик усилия, датчик хода, подключенный к горизонта/ ьиому входу Динамоскопа, формирователь напряжения вертикальной резвертки теоретических Д1ишкшграмм н коммутатор,, b т л и ч а ю щ е е с я тем,- что, с цельф -прощения устройства, формирователь напряжения верткк,зльной раэверткн теоретических дйнаглограмм вьшшнен в виде псюледовательно соединенных фиксатор.а ограиичи- гедя скгдала. снйзу,-;:ограни-н теля сйшала Сверху: и ус;йлйш/ш.э :причвм выход дат.чнка жода. .подключен, к флксйт0ру ограй ;1Чйтелю сигнала; снизу,, услйНТФЛя совместно .с да -чйкой;у:::И.яйй. иэдключеща к ком лутатору, ..кот6рого,.соединен с вертякаль аы.м BXoflQfvj ..мое; ояа8 йсто-ШйКй мформадии, принятые во вня.маниэ при ЭЕСкертизе изобретения; i, Мамяконов А, Г,, ГешепйП М, Г, Телемеханизация .в нефтяной к газовой прО мьшшенвости,, М., Надра } .1961, с, 2 Я. й„ Me.Xhiyii.os 10 А..,. Евдаев И Д, и др. Устройство для автоматазйцнн обработки тенедйкемогра /ш; . ®3а Технйческий дас греес 1969, 2, с. .
я/ f5/f
Фиг.1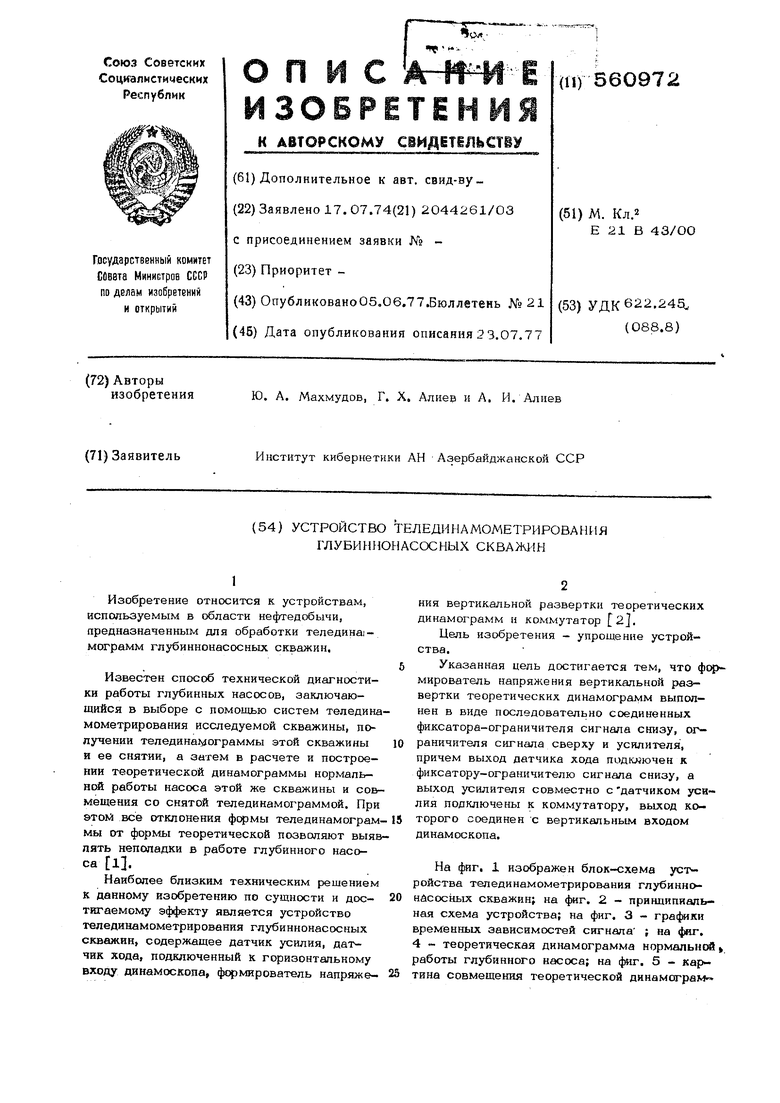
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для трубного телединамометрирования глубиннонасосных скважин | 1979 |
|
SU855198A1 |
| Устройство телединамометрирования глубиннонасосных скважин | 1976 |
|
SU618535A1 |
| Устройство телединамометрирования глубиннонасосных скважин | 1981 |
|
SU969968A1 |
| Устройство телединамометрирования глубиннонасосных скважин | 1983 |
|
SU1116216A2 |
| Устройство телединамометрирования глубиннонасосных скважин | 1980 |
|
SU977717A1 |
| Устройство телединамометрирования глубинно-насосных установок | 1990 |
|
SU1767225A1 |
| Устройство для телединамометрирования глубинно-насосных скважин | 1990 |
|
SU1797131A1 |
| Устройство для определения силы трения в подземной части скважинной штанговой насосной установки | 1984 |
|
SU1195052A1 |
| Устройство для определения причин незаполнения жидкостью скважинных штанговых насосов глубиннонасосной установки | 1984 |
|
SU1177539A1 |
| Устройство для обработки телединамограмм глубиннонасосных скважин | 1983 |
|
SU1134702A1 |
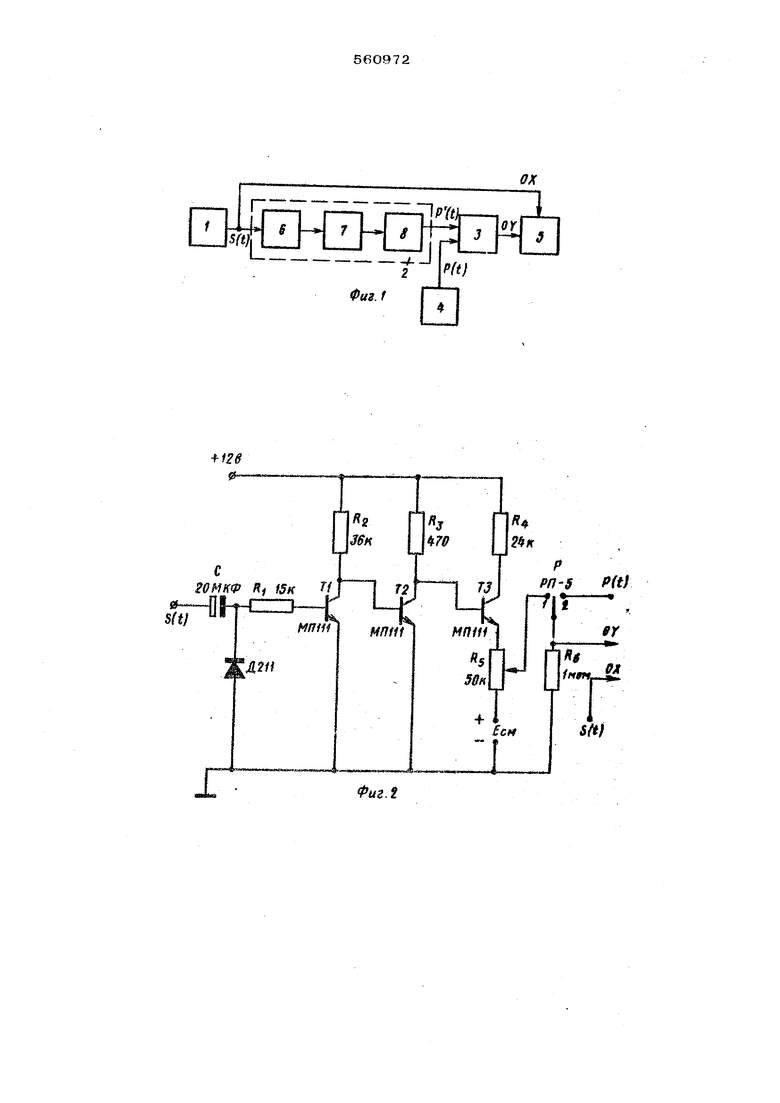
Фиг.З
хл
0
Фиг.
иг.5
