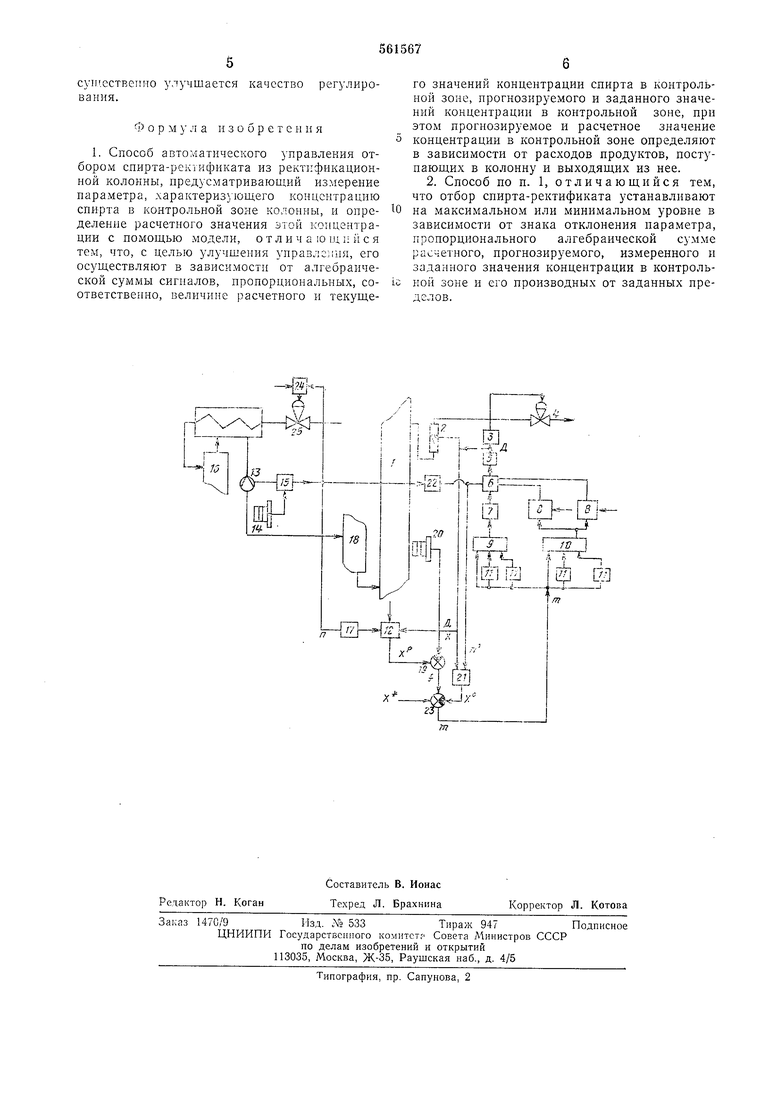
pa 7, реализующего непрерыный закон, двух позиционных регуляторов 8, вычислительных устройств 9 и 10 и дифференциаторов 11.
Для вычисления величины т, равной алгебраической сумме сигналов, цропорщюнальных, соответственно, величинам расчетного, текущего, прогнозируемого и заданного значений концентрации в контрольной зоне ректификационной колонны используют следующую схему.
Вычислительное устройство 12 моделирует динамику объекта по каналам «отбор спиртаректификата (Д)-концентрация спирта в контрольной зоне (X) и «возмущающее воздействие- X. На вход вычислительного устройства 12 поступают: сигнал, пропорциональный количеству отбираемого спирта-ректификата (Д) (выходной сигнал датчика 2 или, что практически эквивалентно, задание регулятору 3, т. е. Д); сигнал, пропорциональный возмущающему воздействию. На чертеже в виде примера показано, как реализуется учет возмущения по количеству абсолютного алкоголя (П).
Сигналы от датчиков 13 и 14 расхода и концентрации бражного дистиллята поступают в вычислительное устройство 15, выходной сигнал П которого пропорционален производительности бражной колонны 16 по абсолютному алкоголю. Этот сигнал задерживается в динамическом устройстве 17 на время прохождения продукта через эпюрационную колонну 18 и затем поступает на вход вычислительного устройства 12. Выходной сигнал вычислительного устройства 12 - расчетное значение концентрации спирта в контрольной зоне ХР в блоке 19 сравнения - сравнивается с фактическим значением этой концентрации X, которое измеряется датчиком 20. Величина X может быть определена по косвенным параметрам, например по температуре или упругости паров в контрольной зоне. Величина в дальнейшем играет роль возмущающего воздействия.
Прогнозируемое значение концентрации в контрольной зоне Х° формируется в вычислительном устройстве 21, коэффициенты передачи которого такие же, что и вычислительного устройства 12, а динамические характеристики выбираются таким образом, чтобы обеспечить высокое качество регулирования.
По аналогии с вычислительным устройством 12 в вычислительном устройстве 21 могут учитываться и возмущающие воздействия, например производительность бражной колонны, причем для согласования динамики этот сигнал пропускают через динамическое устройство 22, моделирующее динамику ректификационной колонны по соответствующим каналам (сигнал П ). Вычисленный таким образом сигнал Х° поступает в устройство 23, которое формирует сигнал согласно соотношению
m-X°-X +f,(1)
где X - заданное (постоянное) значение X.
Для дальнейшего повышения качества регулирования сигнал П можно одновременно подавать в сумматор для регулирования отбора но возмущению, а величину П стабилизировать, например, с помощью воздействия на расход бражки (регулятор 24, исполнительный механизм 25).
Предлагаемый способ осуществляют следующим образом.
10 Пусть в некоторый момент времени система находится в состоянии равновесия, т. е. Х Х . При этом f m 0. Если в следующий момент концентрация X под влиянием каких-либо неучтенных в вычислительном устройстве 12 возмущений отклонится, например, в большую сторону, происходит следующее.
Поскольку Д и П остались неизменными, то в первый момент и f изменится. 0 Согласно уравнению (1) уменьшается ш.
Если это уменьшение небольшое и относительно медленное, отрабатывается непрерывная часть системы (цепочка 10-9-7) и увеличивается задание Д так, чтобы скомпенси5 ровалось отклонение.
При большом или резком уменьшении m отрабатывает сначала позиционная часть системы (цепочка 10-11-8), которая устанавливает Д на нулевом уровне, чем исключается отбор некачественного продукта. После уменьшения рассогласования m до допустимой величины Д, позиционная часть отключается и остаток рассогласования отрабатывается системой 10-9-7.
5 Поскольку контур 2-3-4 малоинерционен, время установления m определяется только инерционностью вычислительного устройства 21, а его параметры можно выбрать так, чтобы обеспечивался любой желаемый переходный процесс по Х° и по Д. Наличие дифференцируюших устройств 11 дает дополнительные возмол ности для формирования переходного процесса.
Если статические характеристики вычисли5 тельных устройств 12, 21 и объекта близки,
регулятор 7 устанавливает Д так, чтобы
Х°-X, тем самым обеспечивая выполнение
условий и Х Х.
Фактическая концентрация X меняется по 0 сравнению с Х° с запаздыванием. Поскольку динамические характеристики вычислительного устройства 13 близки к аналогичным характеристикам объекта, величина ХР меняется точно также, как и X, а их рассогласование 5 во время переходного процесса остается постоянным. Выбирая соответствующим образом параметры вычислительного устройства 21, можно добиться, чтобы переходный процесс по X повторял с запаздыванием переход0 ный процесс по Х°.
При уменьшении X, а также при изменении задания X предлагаемый способ осуществляют аналогично.
Таким образом переходный процесс по X можно выбрать близким к оптимальному, чем
качество регулиросущественно улучшается вания.
Ф о р м у л а изобретения
1. Способ автоматического управления отбором спирта-ректификата из ректификационной колонны, предусматривающий измерение параметра, характеризующего концентрацию спирта в контрольной зоне колонны, и определение расчетного значения этой концентрации с помощью модели, о т л и ч а ю щ п и с я тем, что, с целью улучщения уцравлс шя, его осуществляют в зависимости от алгебраической суммы сигиалов, пропорциональных, соответственно, величине расчетного и текущего значений концентрации спирта в контрольной зоне, прогнозируемого и заданного значений концентрации в контрольной зоне, при этом прогнозируемое и расчетное значение концентрации в контрольной зоне определяют в зависимости от расходов продуктов, поступающих в колонну и выходящих из нее.
2. Способ по п. 1, отличающийся тем, что отбор спирта-ректификата устанавливают на максимальном или минимальном уровне в зависимости от знака отклонения параметра, пропорционального алгебраической сумме расчетного, прогнозируемого, измеренного и заданного значения концентрации в контрольной зоне и его производных от заданных пределов.

li 1 0
..JX
т
