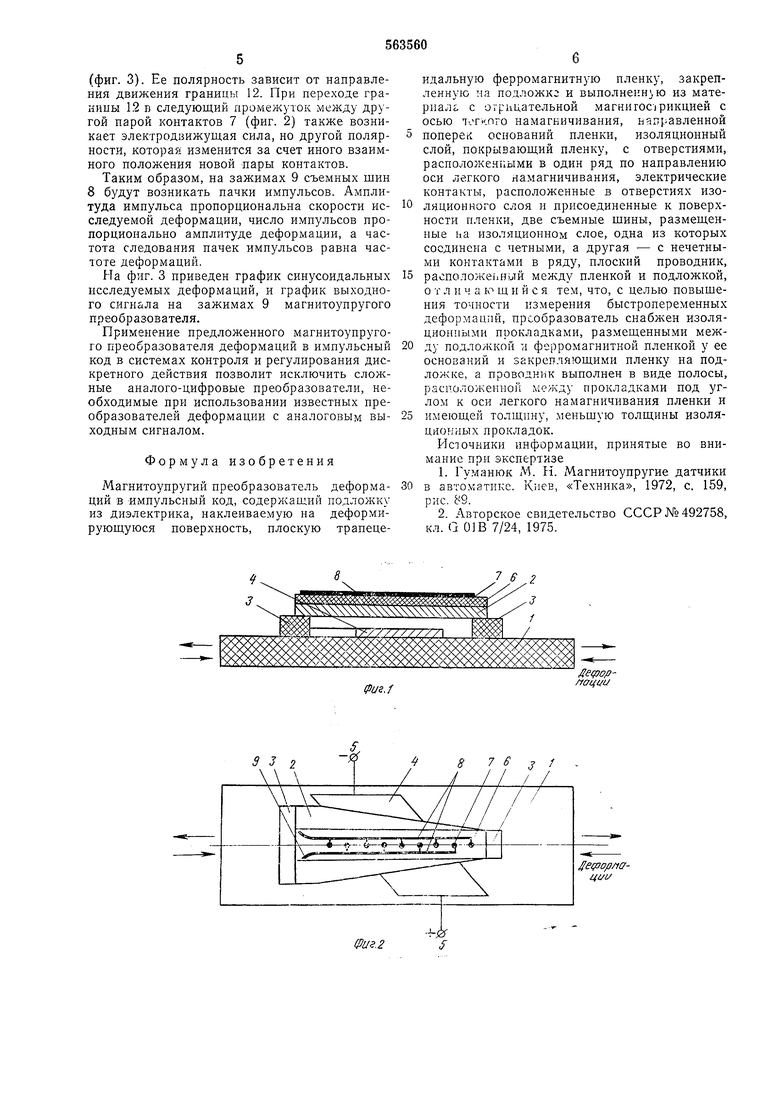
ложке, а проводник выполнен в виде полосы расположенной между прокладками под уг лом к оси легкого намагничивания пленки и имеющей толш,ину, меньшую толщины изоля ционных прокладок. На фиг. 1 изображен магнитоупругий пре образователь в разрезе; па фиг. 2 - то же, вид в плане; на фпг. 3 - картина перемагничива ния плоской трапецеидальпой ферромагнитной пленки; па фиг. 4 - графики переменных де формапий и соответствующих импульсов на выходе датчика. Магнитоупругпй преобразователь деформапий в импульспый код представляет собой многослойную топкопленочную структуру, которая изготовлена методом напыления в вакууме. Основой датчика (фиг. 1) является подложка 1 из полиэтилентерефталата. На подложке 1 размещена плоская пленка 2, изготовленная из пермаллоя с отрицательным коэффициентом магнитострикций в форме трапеции, причем ось легкого намагничивания трапецеидальной пленкп 2 направлена поперек ее оснований. Нленка 2 закреплена на подложке 1 своими основаниями через изоляционные прокладки 3 из моноокиси кремния. Между подложкой 1 и пленкой 2 в свободном промежутке между изоляционными прокладками 3 размещеп алюминиевый проводник 4, выполненный в форме полосы, расположенной под углом к оси легкого намагничивания пленки 2. Толщина проводника 4 меньще, чем толщина изоляционных прокладок 3. Проводник 4 снабжен зажимами 5 для присоедииения к источнику постоянного тока. Поверх пленки 2 нанесен изоляционный слой 6 из моноокиси кремния. В слое 6 имеются отверстия, расположенные в ряд по оси легкого намагничивания, в которых находятся контакты 7, связанные с поверхностью плепки 2. Контакты, расположенные в ряд, присоединены к двум съемным щинам 8, причем четные контакты присоединены к одной, а нечетные контакты - присоединены к другой щине. Шины 8 снабжены присоединительными зажимами 9. Преобразователь наклеивают на деформирующуюся поверхность подложкой 1, зажимы 5 присоединяют к источнику постоянного тока, а зажимы 9 - ко вторичной аппаратуре. Переменные деформации исследуемой поверхности воспринимаются подложкой 1 (фиг. 2) и передаются трапецеидальной пермаллоевой пленке 2 через изоляционные прокладки 3. В результате в пленке 2 будут возникать механические напряжения, причем лишь растягивающие, так как при деформациях сжатия тонкая пленка 2 может свободно изгибаться без сжатия. Поскольку площадь поперечного сечения пленки 2 различна на различных ее участках за счет трапецеидальной формы, то растягивающие напряжения в каждом сечении в один и тот же момент времени будут различны: максимальны у меньшего основания и минимальны у больщего основания. Наличие рассмотренных растягивающих напряжений приводит к тому, что вектор намагниченности пленки 2 будет поворачиваться в сторону от первоначального направления по оси легкого намагничивания иа некоторый угол, что объясняется отрицательной величиной коэффициента магнитострикцип материала пленки 2. Величина этого угла, согласно основным положениям формы ферромагнитизма, с ростом растягивающих напряжений изменяегг-1 скачкообразно - вначале возрастает медленно, а затем, начиная с некоторого порогового значения, быстро достигает предельного значения, равиого 90° к вектору растягивающих напряжений. Таким образом, пленка 2 окажется разделенной на две части 10 и 11 (фиг. 3). В части 10 пленки, где растягивающие напряжения меньше порогового значения, вектор намагниченности будет близок по направлению к оси легкого нама ничивания, а в части И пленки, где напряжения выше порогового, он будет направлен под углом, близким к 90° по отношению к вектору растягивающих напряжений. Части 10 и 11 ферромагнитной пленки разделены границей 12, представляющей собою сравнительно узкую область, где вектор намагниченности имеет промежуточные значения угла поворота. Граница 12 при переменном характере ис следуемых деформаций будет перемещаться по пленке между ее основаниями. При росте растягивающих деформаций она будет перемещаться к большему осповаиию, а при уменьшении - к меньшему основанию. При сжимающих деформациях граница 12 как бы уходит за меньщее основание, поскольку напряжения сжатия не могут возникать в пленке изза ее свободиого изгиба. Величипа и скорость перемещения границы 12 будут пропорциональны величине и скорости исследуемых растягивающих деформаций. При перемещении границы 12 вектор намагниченности приграничных участков пленки быстро поворачивается из одного в другое положение, которые соответствуют направлению намагниченности частей 10 и И ферромагнитной пленки. Этот поворот осуществляется во всех заменах приграничных участков плени в одну сторону благодаря наличию ориенирующего магнитного поля 13, созданного остоянным током, протекающим по проводику 4 (фиг. 1 и 2). Описанное перемагпичивание ферромагнитой пленки приводит к тому, что в соответстии с законом электромагнитной индукции, на е поверхности возникает электрическое поле. ак, если граница 12 (фиг. 3) между частяи пленки 2 (фиг. 2) с разным направлением ектора намагниченности перемещается межу дзумя смежными контактами 7, то на них озникнет электродвижущая сила, пропорциоальная скорости перемещения Гранины 12
(фиг. 3). Ее полярность зависит от направления движения границы 12. При переходе границы 12 в следующий промежуток между другой парой контактов 7 (фиг. 2) также возникает электродвижущая сила, но другой полярности, которая изменится за счет иного взаимного положения новой пары контактов.
Таким образом, на зажимах 9 съемных шин 8 будут возникать пачки имнульсов. Амплитуда импульса пропорциональна скорости исследуемой деформации, число импульсов пропорционально амплитуде деформации, а частота следования пачек импульсов равна частоте деформаций.
Pla фиг. 3 приведен график синусоидальных исследуемых деформаций, и график выходного сигнала на зажимах 9 магнитоупругого преобразователя.
Применение предложенного магнитоупругого преобразователя деформаций в импульсный код в системах контроля и регулирования дискретного действия позволит исключить сложные аналого-цифровые преобразователи, необходимые при использовании известных преобразователей деформации с аналоговым выходным сигналом.
Формула изобретения
Магнитоупругий преобразователь деформаций в импульсный код, содержащий подложку из диэлектрика, наклеиваемую на деформирующуюся поверхность, плоскую транецеидальную ферромагнитную пленку, закрепленную на подложке и выполненною из материала с отрицательной магнигос рикцией с осью тогкпго намагничивания, направленной поперек оснований пленки, изоляционный слой, покрывающий пленку, с отверстиями, расположенными в один ряд по направлению оси легкого намагничивания, электрические контакты, расположенные в отверстиях изоляционного слоя и присоединенные к поверхности пленки, две съемные шины, размещенные iia изоляционном слое, одна из которых соединена с четными, а другая - с нечетными контактами в ряду, плоский проводник,
расположеьньтй между пленкой и подложкой, отличающийся тем, что, с целью повышения точности измерения быстропеременных деформаций, преобразователь снабжен изоляционными прокладками, размещенными между подложкой Л ферромагнитной пленкой у ее оснований и закрепляющими пленку на подложке, а проводник выполнен в виде полосы, расположенцой между прокладками под углом к оси легкого намагничивания пленки и
имеющей толщину, меньшую толщины изоляционных прокладок.
Источники информации, принятые во внимание при экспертизе
1.Гуманюк iM. И. Магнитоупругие датчики в автоматике. , «Техника, 1972, с. 159, рис. 89.
2.Авторское свидетельство СССР № 492758, кл. G 01В 7/24, 1975.
7/.
effjoflffoifUU
.f
| название | год | авторы | номер документа |
|---|---|---|---|
| Магнитоупругий преобразователь усилий и деформаций в число-импульсный сигнал | 1980 |
|
SU922500A1 |
| Устройство для измерения температуры | 1977 |
|
SU678340A1 |
| Магнитоупругий преобразователь | 1973 |
|
SU492728A1 |
| Магниторезистивный датчик магнитного поля | 2019 |
|
RU2738998C1 |
| Магнитоупругий датчик | 1974 |
|
SU502246A1 |
| МАГНИТОЭЛЕКТРИЧЕСКИЙ ЭЛЕМЕНТ ДЛЯ ЭНЕРГОНЕЗАВИСИМЫХ ЗАПОМИНАЮЩИХ УСТРОЙСТВ | 2023 |
|
RU2822556C1 |
| Способ контроля механических напряжений в стальных конструкциях магнитоупругим методом | 2021 |
|
RU2764001C1 |
| Магнитоупругий преобразователь для измерений малых перемещений | 1976 |
|
SU596821A1 |
| Электромагнитный датчик | 1981 |
|
SU991196A1 |
| МАГНИТОРЕЗИСТИВНАЯ ГОЛОВКА-ГРАДИОМЕТР | 2013 |
|
RU2521728C1 |

4
/ г f
/ / / / / /
ffeijoopnffifi/i
Фиг.2
. ..-t f,,.
w
13
вш i
