(54) МЕХАНИЧЕСКАЯ РУКА
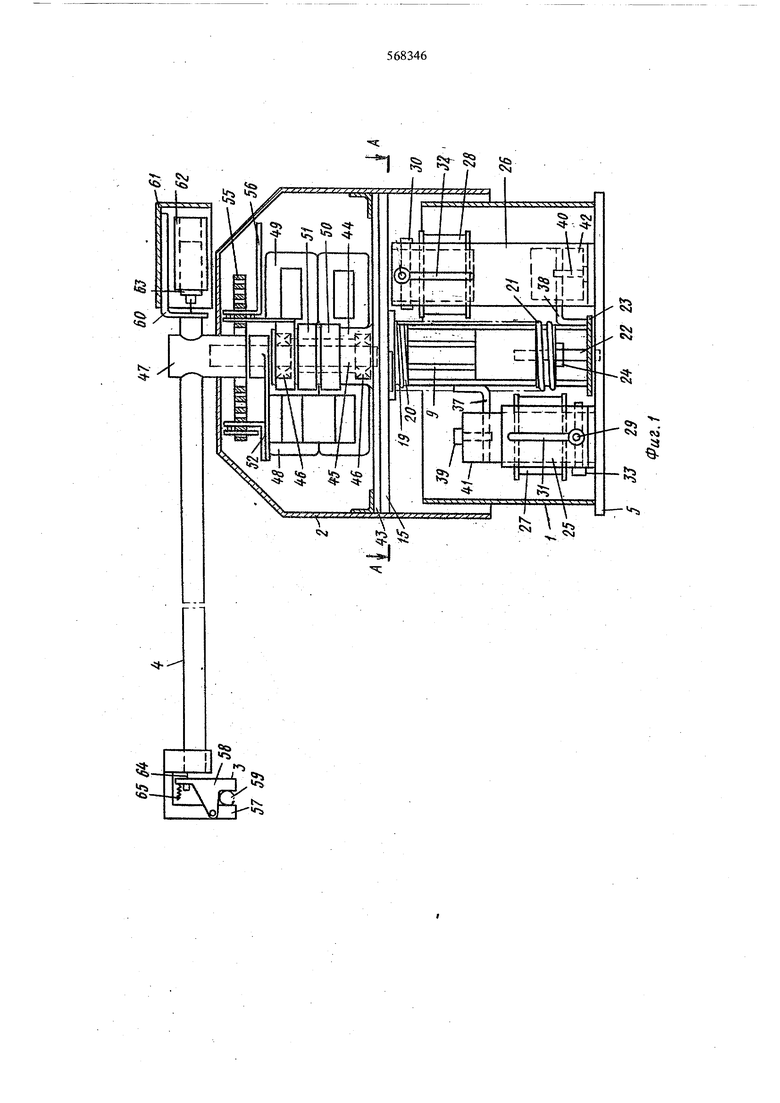
Мехашиеская рука имеет подвижные зветя в виде модулей: Модуль 1 служит для BepiiDcajibHoro перемещения, модуль 2 - для создания вращательнот-о движещя, а модуль 3 является зажимным приспособлением и смонтирован на рычаге 4, Модули имеют приводы, выполнешйю в виде маятника, снабженного фиксаторами К)айш1Х положений. Модуль 1 смонтирован на основашо 5, служащем опорой для направ;шющей 6 вертикального перемещения механической руки, которая содержит стержень 7, прикрепленный к основаш1ю 5 винтом 8, и имеет четыре паза 9 с размещенными в них шариками 10. Они удерживаются в пазах втутжой 11, клюющей гнездо 12 под шарики 10. Втулка 11 прикреплена к пластинам 13 винтами 14 и вместе они прикреплены к монтажной пластине 15 винта. ми 16. Плавтина 15 служит опорой для модуля 2. Таким образом, пластина 13 совместно с монтажнш пластиной 15 образует подвижную часть узла вертикального перемещен1ш. В верхней части стержня 7 при помощи винта 7 закреплена ограничительная пластана 18, препятствующая выпаданию шариков 10 из пазов 9. Между основавшем 5 и пластиной 15 установлена спиральная пружина 19, верхний конец которой снабжен резьбовым соединедием, выпо/шенным на штифте 20, установленном на монтажной пластине 15. На нижнем конце спиральной пружины вьтолнена резьба и завернута в резьбовое отверс-гае в диске 21 с регулировочным винтом 22. Для установки регулировочного винта предназначено колесико 23. Нижний конец регулировочного винта установлен в отверст1-ш, имеющимся в основанш 5, причем этот конец регу1шровочного винта свободно, упирается в отверстие, при повороте регулировочного винта 22 посредством колесика 23 диск 21 перемещается вверх или вннЗ так, что в результате будет достигаться установка такогонейтрального положе П1я, относительно,которого должно нроисходдть вертикальное маятниковое движешге. При установке нейтрального положения следует учитывать вес элементов, участвующих в создании вертикЕшьного перемещешш. Диск 21 может быть заблокирован в требуемом ycтaнoвoщ oм положении посредством стопорной
гайки 24.
I
На основании 5 установлены рейки 25 и 26, каждая из которых служит опорой для электромагнитов 27 и 28. Кажд,ый электромагнит 27 и 28 крепится к соответствующей опорной рейки при помощи винтов 29 и 30, которые могут перемещаться вдоль продольных пазов 31 и 32, выполне1шых в опорных рейках 25 и 26, что позволяет произвести регулировку положения указанных электромагнитов. Электромапшты 27 и 28 крепятся посредств ом винтов 33 и 34 к кронштейнам 35 и 36 и-образной фрмы, в которых установлены винты 2 и 30.
Уголковые кронштейны 37 и 38, к которьии при помощи винтов 39 и 40 прикреплены постоянные мапшты 41 и 42, расположены на пластинах 13, скрепленных с монтажной пластиной 15.
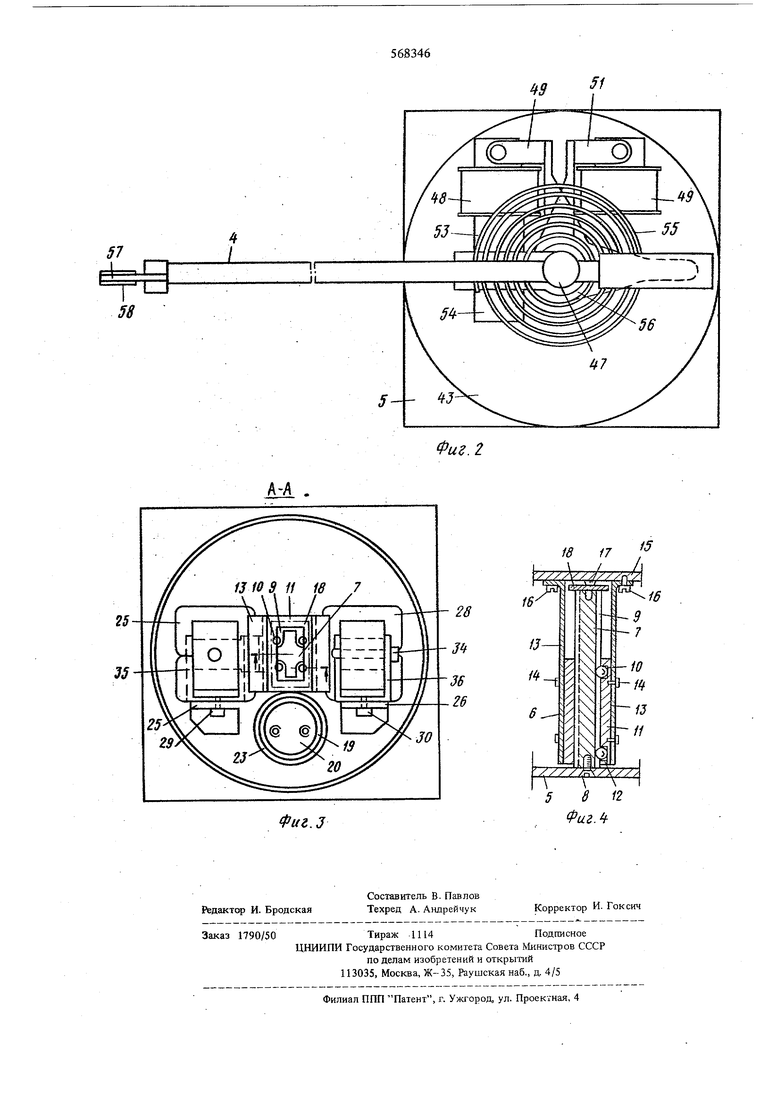
Основание 43, служащее опорой для узла 2 создания вращательного движения, крепится к монтажной пластине 15 и имеет трубку 44, в которой находится вал 45 с цапфой. Вал установлен в шарикоподЕпшниках 46. На конце этого вала установлена втулка 47 служащая опорой для рычага 4. Указанньп рычаг может вращаться между конечными положениями, определяемыми положениями электромагнитов 48 и 49, поддерживаемых держателями 50,51, которые съемно закреплены на трубке 44. Положение указанных элект омагнитов можно легко изменять путем поворота соответствующего держателя. На держателе 52 установлены постоянные магниты 53 и 54, причем данный держатель закреплен на валу 45.
Для приведения в действие рычага 4 спиральная пружина 55 Tima пружины часового механизма закрепляется между держателями 52 и 56, зажатыми на трубке 44. .Путем поворота держателя 56 может быть установлено нейтральное положение, относительно которого рычаг 4 будет совершать маятниковое движение.
Модуль 3, являющийся зажимным приспособлением, содержит неподвижный рьнаг 57 и подвижный рычаг 58, цапфа которого установлена в неподвижном рычаге 57, причем при взаимодействии указанных рычагов происходит захват изделия 59. На другом конце рычага 4 установлен уголковьш кронштейн 60, снабженньш закрепле1шой на нем втулкой 61. Последняя i удерживает электромагнит 62, снабженньш подвижным якорем 63, к которому прикреплен один конец тросика 64, а другой конец этого тросика закреплен к подвижному рычагу 58 зажимного приспособления, действуя йа последний с силой, развиваемой пруяданой 65.
Механическая рука работает следующим образом.
Изделие 59 удерживается зажимным приспособле1шем (модуль 3). Передаточные элементы занимают положеьше, показанное на фиг. 1. При этом узел создания вертикального движения при помощи рычага 4 приводит в движение модуль 2, создающий вращательное движение, в результате чего изделие 59 переходит в верхнее конечное положение, определяемое положением электромагнита 28. Затем узел вращательного движения разворачивается на 180° относительно положения, показанного на фиг. 2, переходя в положение, определяемое положением электромагнита 49. Наконец, захватьшающее приспособление передает изделие 59 в приемный пункт (не показан). Все указаьшые электромагниты подключены к центральному блоку управления (также не показан), из которого поступает, требуемая команда.
Электромагнит 27 возбуждается таким образом, что создается поле отталкивания, направление которого противоположно направлению магнитного поля, создаваемого постоянным магнитом 41. При
этом электромагнит 28 возбуждается так, что вырй батьшается поле притяжения, направление которого совпадает с направлением магнитного поля, создаваемого постоянным магаитом 42. Подвижная часть узла, участвующего в создании вертикального перемещения, освобождается, двигаясь в направлемш верхнего конечного положения, причем под действием пружины 19 происходит начало направленного вверх маятникового движения. На начальном участке этого движения указанная подвижная часть воспринимает дополнительное усилие, создаваемое относительным полем отталкивания, создаваемым электромагнитом 27 и постоянным магнитом 41. Пружина 19 позволяет передать определенное усилие на подвижную часть узла вертикального перемещения, в результате чего этот узел переходит в положение, близкое к верхнему конечному положению, откуда под действием относительного поля отталкивания, создаваемого электромагнитом 28 и постоянным магнитом 42, указанная подвижная часть перемещается в верхнее конечное положение.
Если узел вертикального перемещения совершает движение вверх, электромагнит 48 возбуждается таким образом, что создается поле отталкивания, противодействующее полю, создаваемому постоянным магнитом 53. При этом электромагнит 49 возбуждается так, что вырабатьшается поле притяжения, действующее согласно с магнитным полем, создаваемым постоянным магнитом 54. Следовательно, рычаг 4 освобождается и под действием пружины 55 происходит начало маятниково. го движения подвижного узла в направлении противоположного конечного положения. При необходимости получить вертикальное перемещение в начальной стадии этого движения осуществляется суммирование движущей силы с усилием, создаваемым пружиной 55 благодаря относительной силы отталкивания, возникающей при взаимодействии электромагнита 48 и постоянного магнита 53. Пружина 55 перемещает рычаг 4 в такое положение, при котором постоянный магнит 54 настолько близко приближается к электромагниту 49, что происходит их притяжение за счет поля притяжения, создаваемого указанным электромагнитом, в результате чего постоянный магнит, движимый этим усилием, упирается в этот магнит.
После заверщения соответствующего перемещения, вьшолняемого узлом вращательного движения, электромагнит 62 действует на зажимное приспособление, которое передает указанное изделие 59.
Перемещение зажимного приспособления - модуля 3 обратао в исходное положение, показанное на фиг. 1, происходит таким же образом, как описьшалось, с той лишь разницей, что рассмотренные электромагниты будут возбуждаться так, что
вместо создания попя притяжения будет вырабатываться поле отталкивания и наоборот.
Вследствие того, что магнитные поля жл отталкивания действуют только на начальном участке маятникового движения, в целях экономии
электроэнергаи целесообразно отключать питающий ток от соответствующих электромагнитов на последующих участках .
Формулаизобретения
15
1.Механическая рука, предпочтительно промышленного робота, содержащая подвижные звенья и соответствующие им приводы, отличающаяся тем, что, с целью упрощения констр асции и повыщения надежности в работе, привод каждого звена вьшолнен в виде маятника, снабженного фиксатором крайних положений.
2.Рука по п. 1, отличающаяся тем, что фиксаторы крайних положений вьшолнены в виде
электромагнитов, взаимодействующих с закрепленными на звеньях руки пластинами из магнитного материала.
3.Рука по п. , отличающаяся тем, что фиксаторы крайних положений вьшолнены в виде
i электромагрштов, взаимодействующих с закрепленныйи на звеньях руки постоянными магнитами,
4.Рука по пп. 1,2,3, отличающаяся тем, что aneKTpoMartmTbJ вьшолнены регулируемылга для устанобки величины перемещений звена между
конечными положениями.
5.Рука по п. 1, о т л и ч а ю щ а я с я тем, что маят1шковый привод снабжен пружинами.
6.Рука по п. 5, отличающаяся тем, что по меньшей мере одно звено руки смонтировано на
вертикальной оси и маятниковый привод этого звена выполнен в виде плоской спиральной пружины, установленной на этой оси.
7.Рука по п. 3, отличающаяся тем, что Электро магниты вьшолнены переменной поляр ности.I
Источники информации, принятые во внимание при экспертизе:
1. Авторское свидетельство СССР № 247753, кл. 49 с 30/01, 1969./ .
2. Сурнин Б. И. и др. Промьшшенные манипу-
ляторы с программным управлением . Обзор зарубежной печати за 1960-1971 гг., М., 1972. 5 
«
LT
«
57
58
