Наиболее распространенными инструментами для магнитных измерений повышенной точности в настоящее время являются магнитные теодолиты, индукционные и стрелочные инклинометры и вариометры типа весов Шмидта. Первые, хотя и достаточно надежны по точности, но обычно очень сложны, некомпактны и требуют длительного времени для наблюдения. Основным недостаткам других приборов, например, магнитных вариомет ов типа весов Шмидта, является то, что измерения Z и h производятся отдельными приборами, а магнитное склонение совсем не измеряется. Прочие известные приборы имеют также различные технические недостатки, препятствующие их распространению. Так, например, весы Гаалка, хотя достаточно точны и позволяют определять все элементы магнитного поля, но недостатком их все же является наличие сильного компенсирующего магнита.
Предлагаемый вариометр в принципиальном отнощении аналогичен щироко распространенным вариометрам типа весов Шмидта с качающимися на призме магнитными стрелками. В отличие от последнего в нем вертикальная ось кубика с призмами, с целью определения как вертикальной Z и горизонтальной Н составляющих земного магнетизма, так и склонения D повернута относительно магнитной оси стрелок на угол 45°, и вместо одного зеркала на кубике системы располагаются два зеркала, из которых одно служит для наблюдений щкалы при определении Z и А а второе - при определении И.
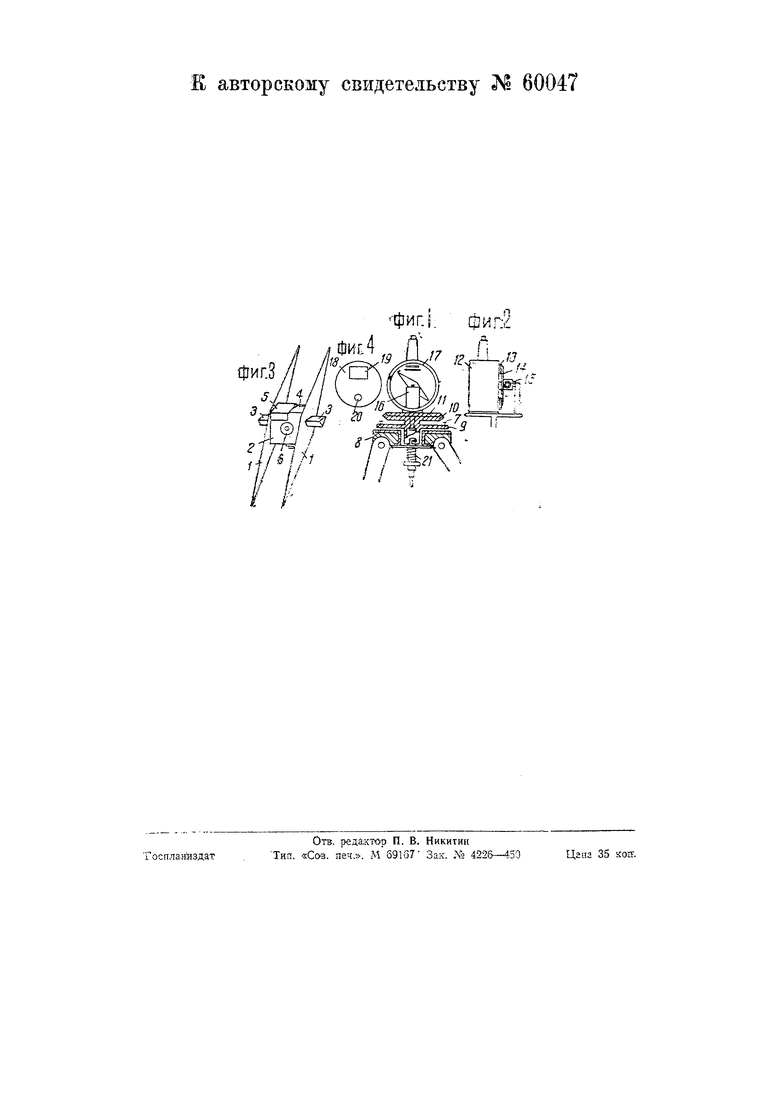
На чертеже фиг. 1 показывает общий вид прибора в вертикальном разрезе; фиг. 2 - боковой вид домика прибора; фиг. 3 - магнитную систему; фиг. 4 - боковую крыщку домика прибора со стеклянным окошком.
Помимо выщеуказанного отличия от существующих вариометров, к прибору добавляется геодезическая труба и вертикальный круг, а точность горизонтального круга увеличена до 1 минуты.
При наличии всех этих изменений прибором можно определять.
вертикальную и горизонтальную составляющие магнитного поля и магнитное склонение. Им можно также пользоваться для геодезических и наиболее простых астрономических наблюдений, т. е., вообще говоря, им можно заменить четыре прибора.
Магнитная система прибора (фиг. 3) состоит из двух магнитных стрелок 1, скрепленных с кубиком 2 таким образом, что вертикальная ось последнего составляет угол в 45° с направлением стрелок или, что то же самое, стрелки повернуты на 45 относительно горизонта.
Вся система опирается на опоры призмами 3.
На кубике укреплены два зеркала-отражателя: зеркало 4 для наблюдений в азимуте, т. е. при измерениях Z и D, и зеркало 5 .для наблюдений в плоскости магнитного меридиана, т. е. при измерении Н.
Для регулирования положения центра тяжести предусмотрены грузики 6.
На фиг. 1 показан весь прибор, установленный на штативе. Перед установкой вращающийся диск 6 штатива ориентируется с помощью накладной буссоли по желаемому азимуту и закрепляется. Прибор подъемными винтами 7 устанавливается в гнезда диска 8.
С горизонтальным кругом 9 прибора жестко связан лимб 10, на
Z, + /С,, tg i, + Я tg 4 sin Да -где KI и ЛГг - постоянные прибора, Jo - угол к горизонту. После поворота прибора на 180 равновесие
Zo Ki + К, tg г/ - Я tg i, sin Да Взяв полусумму уравнений (1) и (2) и аторых членов, получим
7 - /с I А- Cg о + tg о) - П
котором вращается его алидада //. С ней скреплен домик 12 (фиг. 2), с которым, в свою очередь, скреплен несущий опоры 16 для призм 5 вертикальный круг 13, алидада 14 которого скреплена со зрительной трубой 15.
В домике расположены термометры 17 (фиг. I), для наблюдения которых в боковой крышке /3 домика (фиг. 4} предусмотрена зеркальная дверца 19. Кроме того на этой же крышке помещается головка 20 арретира.
Перед работой в том или другом районе равновесие системы и положения зеркал устанавливаются для нормальных напряжений. Для компенсации больших аномалий, когда отражение шкалы будет выходить из поля зрения трубы, необходимо применять обычные компенсирующие магниты, вставляемые в становой винт 21 с шипом вместо винтовой нарезки, снабженный для этого выдвигающимся хвостовиком.
Измерение вертикальной составляющей магнитного поля производится при помощи такого прибора следующим образом.
Наблюдая на опорном базисном пункте при качании плоскости системы в азимуте 90 - Да, где Да - погрешность ориентировки прибора буссолью величиною 0,5-1°, будем иметь следующие условия равновесия:
(I)
(2)
(3) наклонения стрелки будет пренебрегая разностями малых
Аналогичные наблюдения на определенном пункте дадут соответственно следующие условия равновесия
Z-f(i + K igi-{-Htgisml ii(la.)
Z /s:i+A, -ЯtgrsiпДa(2а)
7// J- /Г (tgi+tg/) V
AI-|-A gv )
Взяв разность уравнений (За) и (3), получим искомое значение AZ Z-Z,K,g + g - fe-o+ g
или, переходя к отсчетам по шкале:
AZ 2 (я - Wo)
где п и «о - среднее из отсчетов на измеряемом и опорном пункте, а Яз - цена деления шкалы для вертикального напряжения.
Для измерения склонения берем разность уравнений (1а) и (За) к находим:
Sin Да - Ki:( . JL («..:.) . 1 Пользуясь этим соотношением, можно определить положение плоскости качания системы относительно магнитного меридиана, а при наличии на приборе горизонтального круга и зрительной трубы легко найти и магнитное склонение по формуле: + C-90 -Да где А - истинный азимут миры, В - отсчет по горизонтальному кругу прн наводке на миру, С - отсчет по горизонтальному кругу при наблюдении в азимуте 90°-{-Дз. Составляющая //sin Да в формуле (1а) при Я 15000-17000 гамм и при Да 1 будет около 4-5 гамм, т, е. будет давать в приборе заметное отклонение. Я(, ZoCtgгo - H Zctgi - Взяв разность уравнений (7) и (6), ДЯ Я-Яо ( Заменяя разность котангенсов углов выражением (4), окончательно полу (m--m
(4)
. .(5) Поэтому можно заключить, что точность определения отклонения будет порядка Г. Изменение Н в формуле (5) при определении Да можно учитывать лишь приближенно хотя бы с точностью до 1%, т. е. 100-150 гамм, так как Да при этом точно так же определится с точностью 1%. При Да, равном, например, 30 (точность ориентировки по буссоли) это дает ошибку в определении отклонения всего лишь 0,3. Измерение горизонтальной составляющей производится следующим образом. При наблюдении прибором на опорном и определяемом пункте в плоскости меридиана, т. е- nptf а 0, условия равновесия соответственно будут (6) /CjCtg o -А:2 K,cigi - K, айдем Д Я Cctgi-cgt o)-ДZctgi . . . . (8) отсчетами по щкале и значение Д Z им -i-E2(fi - no)cigi{9
где m и ifWo -отсчеты по шкале в плоскости магнитного меридиана на пункте наблюдения и на опорной точке, взятые в обратном направлений шкалы, так как ctgi с увеличением угла уменьшается; fi - цена деления шкалы для горизонтальных напряженнй, зависящая от величины ZQ и К.
Так как i при работе может изменяться только в пределах видимости шкалы, т. е. не более, чем на 1-1,5°, то около 45 изменение ctg будет достигать 4-5%, Поэтому второй член в формулах (8) и (9) и все значение ДЯ будет зависеть еще от наклонения стрелки, т. е. от величины отсчета на точке наблюдения в плоскости магнитного меридиана. Это изменение может доходить до 4-5% от AZ и опытным путем при градуировке прибора легко может быть установлено.
Для характеристики прибора еш,е необходимо осветить работу агатовых призм, на которых вращается магнитная система. Условие равновесия магнитной системы при ориентировке в азимуте 90° и при 0° будут отличаться действием горизонтальной составляюш,ей Н. При чувствительности прибора в 40 гамм на одно деление шкалы, т. е. около 16 гамм на каждую минуту наклонения стрелки, действие всей составляющей Н, имеющей для наших щирот значения 12СОО-2СООО гамм, будет создавать дополнительное наклонение стрелки на 13-21°. У весов
Шмидта ребра призм подшлифо ваны примерно под углом около 120°, т. е. свободный -рабочий ход системы будет 180 - 120° 60°.
Следовательно, при соответствующей установке такая призма должна работать хорошо. Кроме того, для увеличения рабочего хода стрелки подшлифовку призм можно сделать под 90°.
Таким образом, этим прибором с обычной .точностью для весов Шмидта можно будет определять Z и // и с точностью до 1 определить склонение. Для этого необходимо лишь сделать наблюдения в плоскости магнитного меридиана и в плоскости, перпендикулярной к нему, и взять отсчеты по горизонтальному кругу до и после наводки на миру.
Предмет изобретения.
1.Магнитный вариометр с применением качающихся на призме магнитных стрелок, отличающийся тем, что, с целью определения как вертикальной Z игоризонтальной Н составляющей земного магнитного поля, так и склонения D, вертикальная ось кубика 2 с призмами 3 повернута относительно магнитной оси стрелок 1 на угол в 45°,
2.В магнитном вариометре по п. 1 применение двух зеркал 4, 5 из которых одно служит для наблюдений шкалы при определении D и 2, а второе -при определении Н.
Фи-г.4
If3,.f3
фиг.г. фиг:
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения магнитного склонения | 1936 |
|
SU49335A1 |
| Способ магнитометрической разведки | 1932 |
|
SU34086A1 |
| Прибор для определения направления астрономического меридиана | 1940 |
|
SU67877A1 |
| Приспособление к теодолиту для определения направления меридиана по солнцу | 1940 |
|
SU59480A1 |
| ТРЕХКОМПОНЕНТНАЯ МАГНИТНАЯ ВАРИАЦИОННАЯ СТАНЦИЯ | 1964 |
|
SU166506A1 |
| Прибор для измерения азимутов светил, девиации компаса в полете и измерение магнитного склонения с высотой | 1926 |
|
SU3926A1 |
| ТРЕХКОМПОНЕНТНАЯ МАГНИТНАЯ ВАРИАЦИОННАЯСТАНЦИЯ | 1964 |
|
SU166510A1 |
| ДОННАЯ МАГНИТОВАРИАЦИОННАЯ СТАНЦИЯ | 1970 |
|
SU258643A1 |
| Приспособление к магнитометру Тиберг-Галена | 1933 |
|
SU44029A1 |
| Горный компас | 1945 |
|
SU69969A1 |