ма соединения марлитоуправлясмых коита кто:в с входами блока индикации.
Преобразователь содержит магнитоуиравляемые контакты 1-7, установленные неподвижно на немагнитной трубе 8 вдоль направления перемещения.
Магнитоуправляемые контакты 6 расположены на расстоянии d, равном шагу дискретности преобразователя от крайнего магнитоунравля-е.мого контакта 5 группы, иерпендикулярно- к другим магиитоуправляемым контактам. На подвижнОМ элементе 9, связанном с контролируемым органом (на чертеже не показан), установлены основной 10 и дополнительные 11 и 12 магниты, один из которых - магнит 12 установлен противоположно основному магниту 10 на расстоянии, равном интервалу т перемещения внутри одной группы магнитоуправляемых контактов, а другой донолнительный магнит 11 установлен вдоль направления перемещения на всю длину / одной групны.
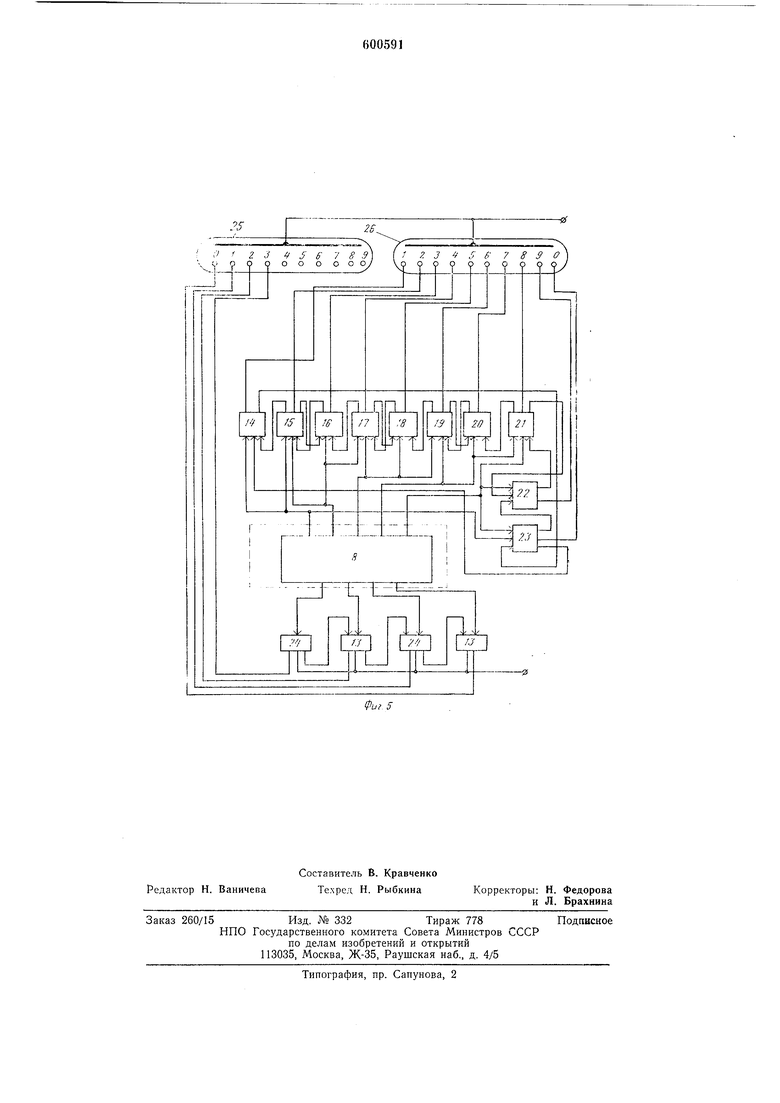
Блок индикации (см. фиг. 4) включает элементы ИЛИ-НЕ 13-24 и индикаторы 25 и 26. Выходы магнитоуправляемых контактов 1-5 каждой группы объединены и -соединены со входами высших разрядов (элементы ИЛИ-НЕ 13) блОКа индикации (см. чертежи фиг. 3 и 4), а другие выводы тех же магнитоуиравляеМых контактов 1-5 подключены ко входам низших разрядов (элементы И-НЕ 14-23) блока индикации, магнитоуиравляемые контакты 1 и 7, 1свя1занные с входами одной цифры блока индикации, соединены между собой параллельно (см. фиг. 3). Группы магнитоуправляемых контактов 6 связаны с входами (элементы ИЛИ-НЕ 24) цифр высших разрядов блока индикации.
В приведенном примере число- групи принято равным четырем, число- магнитоуправляеЛ1ЫХ контактов, индицируюших четную цифру высшего разряда, - равным пяти, с шагом дискретности в 10 мм, а группа, индицирующая нечетную цифру высшего разряда, состоит из одного магнитоунравляемого контакта 6. Выходы элементов ИЛИ-НЕ блока индикации подключены к индикаторам 25 и 26. Работает преобразователь следующим образом.
При нахождении магнита 10 в зоне срабатывания магнитоуправляемого контакта носледний замыкается, и на индикаторы 25 и 26 п-оступ-ает сигнал, индицирующий «1 низшего разряда через элемент И-НЕ 14 -на индикатор 26 и одновременно- на инди-като-р 25 высшего разряда через элемент ИЛИ-НЕ 13, индицирующий «О сотен. Нри дальнейшем перемещении магнитов 10-12 замыкаются одновременно магнитоуправляемые контакты 1 и 2, при этом состояние логического элемента ИЛИ-НЕ 13 не меняется, и индикатор 25 попрежне-м-у и-ндицирует «О сотен, а «а элемент И-НЕ 14 -в это время придет запрещающий сигнал с элемента И-НЕ 15, цифра «1 индикатора 26 гаснет, и загорается цифра «2.
Неремещаясь далыие, магниты 10-12 занимают положеиие, ири котором остается включенным только магнитоуправ-ляемый контакт 2, элемент И-НЕ 15 закрывается, цифра «2 индикатора 26 гаснет, и в-ключается элемент И-НЕ 16, зажигая в индикаторе 26 цифру «3.
Перемещаясь дальше, 10-12 замыкают одновременно -магнитоуправляемые контакты I (магнитом 12), «о-нтакты 5 (магнитом 10) и контакты 6 (магнитом 11). При этом включается элемент И-НЕ 23 и зажигает цифру «О в индикаторе 26, одновременно магн-итоуправляемый контакт 6 включает элемент ИЛИ-НЕ 24, который запрещает гореть цифре «О в индикаторе 25 и включает цифру «1 сотен. Таким образом, при шаге дискретности в 10 мм блок индикации индицирует перемещение контролируемого органа на 100 мм. Положение, которое занимают магниты 10-12 при этом, показаны на фиг. 1. Перемещаясь дальше, магниты занимают полол ;ение, при кото-ром мапнитоунравляемый контакт 5 размыкается и включенными остаются контакты 1 и 6. Элемент И-НЕ 23 закрывается, включается элемент И-НЕ 14, в индикаторе 26 загорается цифра «1, а- в индикаторе 25 продолжает гореть цифра «1 сотен.
Переключение цифр в индикаторе 25 ироизойдет, когда магниты 10-12 займут положение, при котором будут замкнуты магнитоуиравляемые контакты 5-7. При этом элемент ИЛИ-НЕ 24 закроется, а включится элемент ИЛИ-НЕ 13; в индикаторе 25 загоритея цифра «2, а индикатор 26 будет индицировать цифру «О, т. е. контролируемый орга-н переместится на 200 мм. При дальнейН1ИХ иеремещениях магнитов будут индицироваться цифры носледующих «еотен и «десятков перемещения. Аналогичаю работает схема и при обратном перемещении магнитов.
Таким образо-м, с помощью предлагаемого дискретного датчика за счет логических сочетаний замкнутых (и разомкнутых магнитоуправляемых контактов и применения двух дополнительных магнитов можно замерять положение рабочего органа в заданном диапазоне перемещения с точностью в щаг дискретн-ости, с меньшим количеством магнитоуправляемых контактов и большей надежностью.
Формула изобретения
Прео-бразователь п-еремешения в код, содержащий магнит, установленный на подвижном элементе, связанном с ко-нтролируемым органом, груп)пы магнитоуправляемых контактов, установленных неподвижно вдоль направлеПИЯ перемещения, одни выводы магнитоуправляемых контактов каждой группы объеди-нены и соединены со входами высших разрядов блока индикации, а их другие выводы подключены к В.х-одам низших разря-дов блока индикации, магнитоунравляемые контакты, связанtibie с входами одной цифры блока индикации, соединены между собой израллслыю, о т „пичаю щ и и с я тем, что, е целью уирощения и повышения надежности иреобразователя, в него введены донолиительные магниты, один из которых установлен противоположно основному магниту на расстоянии, равном интервалу перемещения внутри одной групны магнитоуцравляемых контактов, а другой дополнительный магинт уста1Ю15лс1 вдоль направления перемещения на всю длину одной групцы, оба дополнительных магнита установлены на подвижном элементе, группьт магнитоуправляемых ко-нтактов, связанных с входамп ииф:р BbicHinx разрядов олока индикации, уста;;овлсны на расстоянии, равном щагу дискретности преобразователя от крайнего мггнитоуп.равляемого контакта каждой группы, перпендикулярно к другим магнитоунравлясмым коптактам.
Источники информации, принятые во внимание при экспертизе
1.Лвторекое свидетельство СССР №381874, кл. G 08с 9/04, 16.03.71.
2.Авторское свидетельство СССР № 511616, кл. G 08С 9/04, 04.11.74.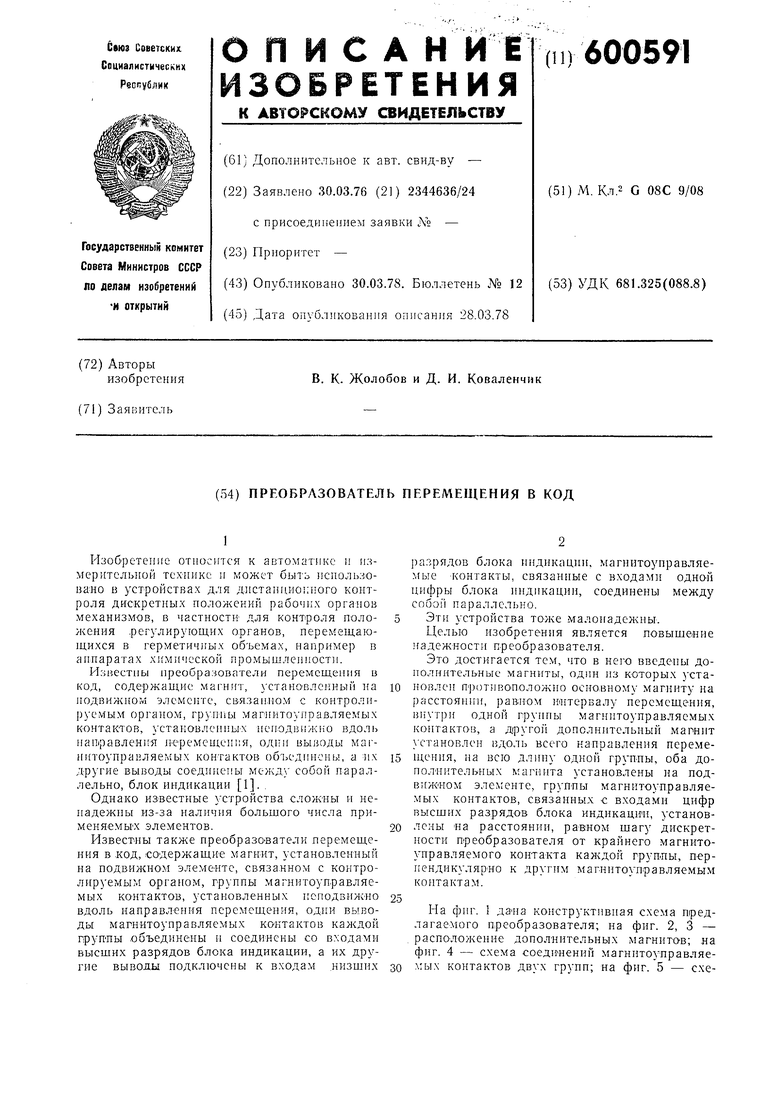

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения перемещений | 1975 |
|
SU696274A1 |
| Устройство для индикации линейных перемещений | 1975 |
|
SU600391A1 |
| Датчик линейных перемещений | 1977 |
|
SU744697A1 |
| Датчик перемещений | 1978 |
|
SU748481A1 |
| Устройство для индикации линейных перемещений | 1979 |
|
SU859817A2 |
| Преобразователь перемещенийВ АНАлОгОВый СигНАл | 1978 |
|
SU815477A1 |
| ГРОМКОГОВОРЯЩИЙ ТЕЛЕФОННЫЙ АППАРАТ | 1970 |
|
SU265956A1 |
| СИГНАЛИЗАТОР ПЕРЕМЕЩЕНИЯ | 1971 |
|
SU304637A1 |
| Поворотный переключатель | 1974 |
|
SU528627A1 |
| КОНЦЕВОЙ | 1973 |
|
SU388311A1 |
.
