(54)
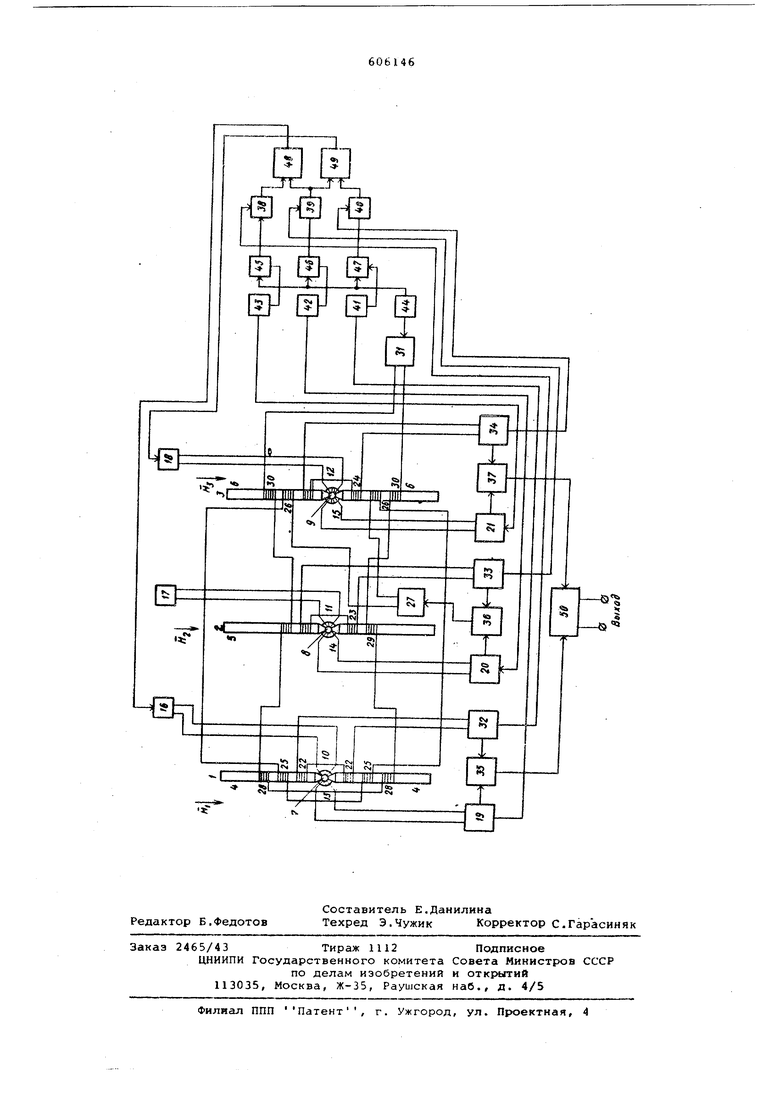
ГРАДИЕНТОМЕТР разделения частот, вторые входы - через соответствующие блоки выделения ра бочих частот компенсации ко второму выходу задающего генератора контрольного сигнала, вторые входаа каждого бло ка выделе|1Йя рабочих частот компенсации - ко второму выходу соответствующего задающего генератора, причем выходы дополнительных разностных блоков соединены со входами управляемого источника постоянного смещения основных магнитомодуляционных датчиков. На чертеже представлена структурная схема устройства. Ферритовые магнитомодуляционные параметрические датчики 1-3 со строго параллельными магнитными осями, пространственно разнесенные друг от друга, состоят из пар неперемагничивающихся ферритовых стержней 4-6, магнитосвязанных между собой перемагничивающимися кольцами - модуляторами 7-9. На кольцах-модуляторах расположены обмот ки постоянного тока 10-12 и обмотки возбуждения 13-15, по которым протека ет переменный ток. Обмотки постоянного тока соединены с управляемыми источниками постоянного тока .16-18. Обмотки возбуждения соединены с усилителями мощности переменного-тока 1921. На датчиках 1-3 расположены основ ные приемные обмотки22-24.На датчи1ках 1 и 3 расположены последовательно включенные обмотки компенсации постоянного геомагнитного пояя 25, 26, сое диненные с блоком компенсации 27. Кроме этого, на всех датчиках расположены соединенные последовательно обмотки контрольного сигнала 28-30, подклю ченные к усилителям мощности кoнтpoлi ного сигнала 31. Выходы приемных обмоток датчиков соединены с блоками разделения частот 32-.34, которые соединены с синхронными детекторами 35-37, а также с синхроннЕлми детекторами выравнивания 38-4 Усилители мощности 19-21, 31 связаны с высокостабильными задающими генера торами 41-44, которые, в свою очередь связаны с блоками выделения рабочих частот компенсации 45-47, а последние с синхронными детекторами выравнивания 38-40. Детекторы выравнивания сое динены с разностно-управляющими блоками 48 и 49, которые,в свою очередь, связаны с управляемыми источниками постоянного тока 16, 18. Выходы синхронных детекторов 35 и 37 соединены с основным разностным блоком 50. Выход г синхронного детектора 36 связан Ъ бло ком 27 компенсации геомагнитного поля . Рассмотрим работу градиентометра. При рассмотрении работы градиентометра в режиме измерения градиента бу дем считать, что все датчики идентичны по своему коэффициенту преобразования и что постоянное геомагнитное поле в датчиках 1 и 3 скомпенсировано. Градиент измеряется посредством датчиков 1 и 3. Геомагнитное поле в них скомпенсировано до разности между геомагнитными полями в месте расположения датчиков 1 и 3 и в месте расположения компенсационного датчика 2. Модуляторы датчиков 1 и 3 возбуждают- ся токами с частота «AI и , обеспечиваемыми усилителями мощности 19 и 21, которые усиливают сигнал высокостабильных генераторов 44 и 43. Сигналы с рабочих обмоток 22 и 24 датчиков поступают в блоки разделения частот 32,34, где на выходах, связанных с синхронными детекторами 35 и 37, выделяются частоты в полосах uJj. -i- д а .coj лоо- полоса частот принимаемых сигналов. В качестве опорного сигнала синхронных детекторов используются напряжения с дополнительных выходов усилителей мощности 19 и 21 с частотами cU и uJg Сигналы с детекторов 35 и 37 поступают в разностный блок 50, на выходе которого выделяется напряжение, пропорциональное градиенту. Для компенсации геомагнитного поля используется датчик 2. Обмотка возбуждения 14 модулятора датчика 2 питается от усилителя мощности 20, усиливающего напряжение высокостабильного генератора 42, вырабатывающего напряжение с частотой uJj,. Выходной сигнал, пропорциональный напряженности геомагнитного поля в месте расположения датчика 2, с приемной обмотки 23 поступает в блок разделения частот 33,где на одном из выходов выделяется сигнал с .частотой oJ,- -Этот сигнал поступает на детектор 36, в котором в качестве опорного сигнала используется напряжение с соответствующего выхода усилителя мощности 20. С детектора сигнал поступает через блок компенсации 21 в обмотки компенсации 25, 26 датчиков 1 и 3, включенные последовательно. Коэффициент передачи блока 27 выбирают таким образом, чтобы поле,возбуждаемое им в датчиках 1 и 3, было равно полю, возбуждаемому в датчике 2 полем Н , и направлено навстречу полям,создаваемым в датчиках 1 и 3 полями Hj. и Hj (Hj, Н, Hj - напряженности магнитного поля в месте расположения датчиков 1, 2, 3 соответственно). Флюктуации выходного тока блока 27 не приводят к появлению помех на выходе разностного блока 50, так как они одинаковы в обоих датчиках 1 и 3, поскольку компенсационные обмотки включены последовательно и через них протекает один и тот же ток компенсации, а выходной сигнал градиентометра равен разности напряжений на выходах датчиков 1 и 3. Таким образом, флюктуации тока компенсации на выходе, разностного блока 50 взаимно уничтожаются.
Для выравнивания коэффициентов передачи датчиков используются соедине ные последовательно обмотки контроль ного сигнала 28-30, запитываемые от усилителя мощности 31, усиливающего сигнал высокостабильного генератор контрольного сигнала 44 с частотой со Ток контрольного сигнала, протекающий по обмоткам 28-30, создает в магнито проводах датчиков 1-3 одинаковые пер .манные магнитные поля с частотой JJKБлоки 32-34 выделяют сигналы комби национных частот, поступающих с рабочих обмоток датчиков 1-3. В зависимос ти от выбранных режимов работы этими частотами могут быть: 1) 0 - tUg-uJ 2 ) uJi -I- сОц ; Ш2- uJj, «к . Выделенные комбинационные частоты поступают на синхронные детекторы 3840. В качестве опорных напряжений в них используются те же комбинационные частоты, получаемые .путем смешивания в блоках 45-47 частот возбуждения дат чиков от генераторов 41-43,и частоты контрольного сигнала от генератора 44 В качестве опорного коэффициента преобразования используется коэффициент преобразования тракта датчика 2. Преобразованный контрольный сигнал эт го датчика поступает с детектора 39 на разностно-управляющие блок:и 48 и 4 На блок 48 поступает также контрольHfcjft сигнал датчика 1, снимаемый с син ронного детектора 38, на блок 49 1 онтрольный сигнал датчика 3 с синхронного детектора 40. На выходах разностно-управляющих блоков появляются напряжения, пропорциональные разности напряжений контрольных сигналов: с датчиков 1 и 2 на выходе блока 48, с датчиков 2 и 3 на выходе блока 49. Если коэффициенты преобразования соответствующей пары датчиков одинаковы, то равна нулю разность напряжений контрольных сигналов и; соответственно равно нулю выходное напряжение разностно-управляющего блока. Если коэффициенты преобразования пары датчиков разные, на выходе соответствующего разностно-управляющего блока появляется напряжение, пропорциональное разности коэффициента преобразования соответствующей парыдатчиков. Напряжения с разностно-управляющих блоков управляют величиной постоянного тока смещения источников 16 и 18. Выходные напряжения блоков 48 и 49 через управляемые источники посто нно.го смещения изменяют постоянные токи в обмотках 10 и 15, выравнивания тем самым коэффициент преобразования датчи
ков 1 и 3 относительно коэффициента преобразования датчика 2.
Аналогичный эффект может быть получен, если воздействовать напряжением разностно-управляющих блоков не на смещение,модуляторов,а на выходное напряжение усилителей мощности 19,21.При этом смещение остается фиксированным, а усилители мощности 19,21 должны допускать управление выходным напряжением. - Источник 17 является автономным и служит для установки коэффициента преобразования датчика 2 в заданных пределах. . Данный градиентометр не чувствителен к ориентации относительно постоянного геомагнитного поля, поскольку компенсация последнего в градиентометре происходит автоматически. Нечувствителен он и к временным вариациям . геомагнитного поля. Благодаря большой широкополосности датчиков этот градиентометр может быть использован для измерения градиентов не только постоянных, но и переменных магнитных полей с частотами до 1000Гц Формула изобретения Градиентометр, содержащий два параллельных магнитомодуляционных датчика, обмотка возбуждения каждого из которых через срответствующий усилитель мощности связана с выходом задающего генератора, обмотка смещения - с выходом управляемого источника постоянного смещения, приемная обмотка - со входом блока разделения частот, а также последовательно соединенные компенсирующие обмотки, синхронный детектор, входы которого связаны с выходом усилителя мощности- и блока разделения частот, а выход - со входом разностного блока, отличающийся тем. что, с целью повышения точности измерения и чувствительности, в него введены дополнительный идентичный магнитомодуляционный датчик,расположенный параллельно основным, последовательно соединенные контрольные обмотки, установленные на основных и дополнительном датчиках,, последовательно соединенные задающий генератор и усилитель мощности контрольного сигнала, выходами подключенный к контрольным обмоткам,блок компенсации, выход которого соединен с компенсирующими обмотками, а вход с выходом синхронного детектора дополнительного датчика, три блока выделе-: ния- рабочих частот компенсации, три синхронных детектора выравнивания по числу магнитомодуляционных датчиков и два дополнительных разностных блока, входы которых соединены с выходами синхронных детекторов выравнивания. первые, входы последних подключены к
выходам соответствующих блоков разделения частот,вторые входы-через соответствующие блоки выделения рабочих частот компенсации ко второму выходу задающего генератора контрольного сигнала, вторые входы каждого блока выделения рабочих частот компенсации - ко второму выходу соответствующего задающего генератора, причем выходы дополнительных разностных блоков соединены
со входами управляемого источника постоянного смещения основных магнитомодуляционных датчиков.
Источники информации, принятые во внимание при экспертизе:
1.-Авторское свидетельство СССР 373678, G- 01V3/00, 1973.
2.Авторское свидетельство СССР № 368560, G-01 R 33/00, 1972.


| название | год | авторы | номер документа |
|---|---|---|---|
| Поисковый градиентометр | 1975 |
|
SU653589A1 |
| Магнитометр | 1980 |
|
SU892357A1 |
| Магнитометр | 1984 |
|
SU1275338A1 |
| Устройство для измерения низкочастотных магнитных полей | 1978 |
|
SU742834A1 |
| Магнитометрический градиентометр | 1977 |
|
SU847236A1 |
| Устройство для измерения низкочастотных магнитных полей | 1979 |
|
SU873169A1 |
| ПРЕОБРАЗОВАТЕЛЬ ГЕОМАГНИТНОГО ПОЛЯ ДЛЯ ИНКЛИНОМЕТРА | 2002 |
|
RU2249790C2 |
| Многоканальное устройство для измерения температуры вращающегося объекта | 1983 |
|
SU1163164A1 |
| Ферритовый магнитомодуляционный градиентометр | 1975 |
|
SU561915A1 |
| Магнитометр | 1978 |
|
SU779949A1 |