Изобретение относится к детекторам к автоматическим ткацким станкам, управляемым вилочным валиком, переставным вдоль оси поворота неподвижной направляющей и снабженным ножницами с зажимом и нитеуловителем, приводимыми в действие от батана.
В предлагаемом станке для прилегания детектора к челноку при незначительном недолете последнего в коробку до установления кинематической связи детектора с вилочным валиком, согласно изобретению, применен свободно сидящий на оси детектора угловой рычаг, одним концом шарнирно соединенный с рычагом вилочного валика, а другим концом прилегающий к поворотному на его оси подпружиненному рычагу.
Для управления подвижной губкой нитеуловителя можно использовать отросток рычага привода детектора, с профилированным торцом, взаимодействующим с роликом губки.
На рычаге детектора может быть смонтирован установочный болт для регулирования положения детектора относительно оси его поворота.
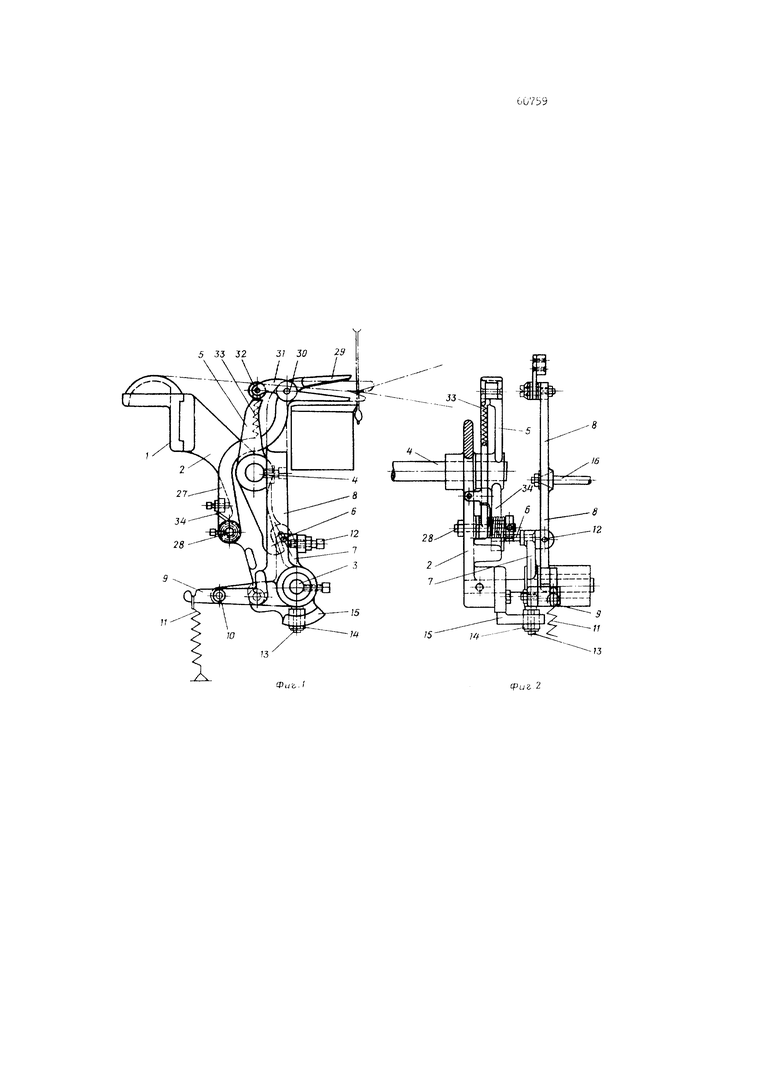
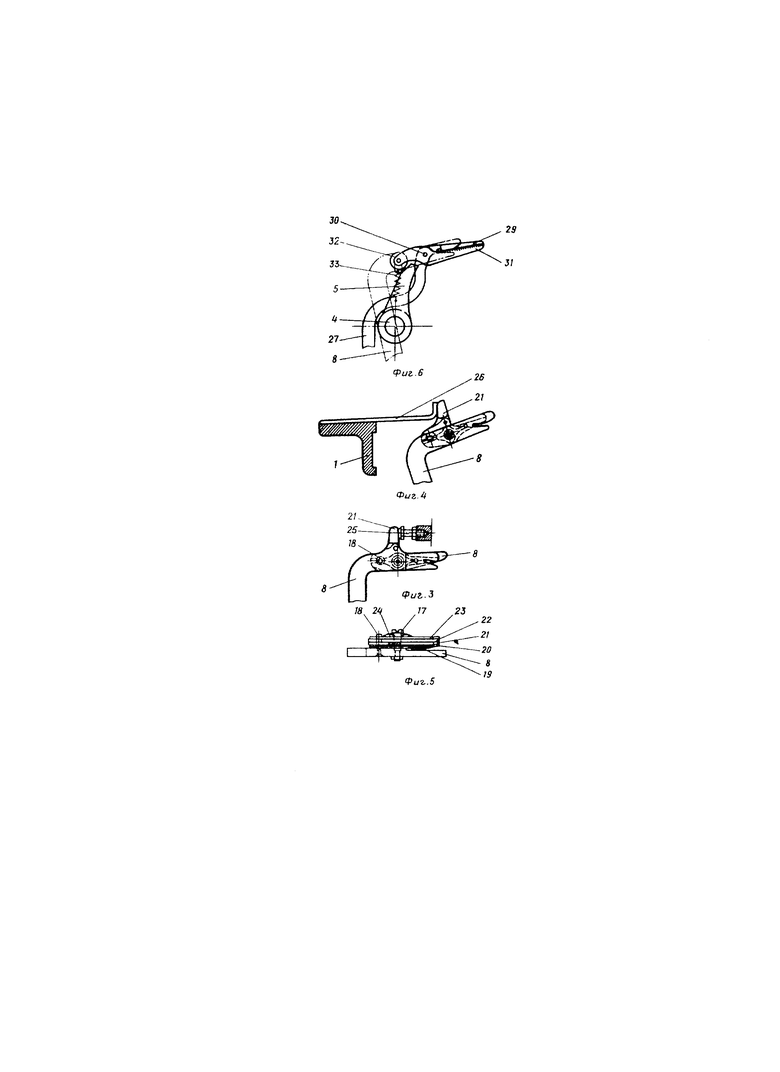
На фиг. 1 схематически изображен описываемый детектор (вид сбоку); на фиг. 2 - то же, вид спереди; на фиг. 3 и 4 - ножницы детектора в двух положениях (вид сбоку); на фиг. 5 - ножницы детектора, вид сверху; на фиг. 6 - нитеуловитель детектора (вид сбоку).
К груднице 1 автоматического ткацкого станка прикреплен кронштейн 2, на нижнем конце которого жестко закреплена ось 3. На вилочном валике 4 смонтирован рычаг 5 с вилкой на нижнем конце, охватывающей палец 6 углового рычага 7, поворотного на оси 3. На втулку рычага свободно надет детектор 8, взаимодействующий своим нижним боковым отростком с рычагом 9, поворотным на пальце 10 углового рычага 7. Конец рычага 7 оттянут вниз пружиной 11, поворачивающей рычаг 9 вокруг пальца 10 против часовой стрелки и детектор 8 на втулке рычага 7 по часовой стрелке до соприкосновения с установочным болтом 12 рычага 7. На пальце 13 рычага 7 снизу поворотно прикреплен ролик 14, входящий в паз направляющей 15, жестко соединенной с торцом кронштейна 2. Направляющая 15 предназначена для осевого перемещения углового рычага 7 вдоль по оси 3 совместно с детектором 8, необходимого для предотвращения обрыва уточной нити, зажатой в кромке ткани и в зажиме ножниц детектора при его отходе.
При недолете челнока боковой отросток детектора 8, который поворачивается челноком вокруг втулки рычага 7, взаимодействует о рычагом 9, несколько растягивая пружину 11. Так как при этом вилочный валик 4 и рычаг 5 неподвижны, то детектор 8 поворачивается в одной плоскости, не отходя от челнока, и его чувствительность к небольшим недолетам челнока не уменьшается. Поворотом направляющей 15 относительно торца кронштейна 2 достигается правильная установка детектора 8 по длине челнока, а установочным болтом 12 рычага 7 правильная подводка детектора 8 по отношению к челноку и приемнику автомата смены шпуль, контролируемому пальцем 16 детектора 8.
Верхний конец детектора 8 несет ось 17 ножниц и палец 18, на которые свободно насажены пластинчатая пружина 19, неподвижный нож 20, направленный лезвием вниз, подвижный нож 21 лезвием вверх, соединенная о ножом 21 пластина 22 из фибры, пластмассы и тому подобного материала и зажимная пластинка 23. На ось 17 сверху посажены планки 23 плоская пружина 24, заправленная своим концом в отверстие планки 23 для предохранения от поворота. При выдвинутом положении детектора 8 нить, идущая из зева в челнок, проходит через горец детектора 8 и между раскрытыми ножами 20 и 21. При подходе батана в переднее положение болт 25 козырька задней щечки батана (см, фиг. 3) упирается в подвижный нож 21, поворачивая его вместе о пластинкой 22 относительно оси 17, то есть закрывает ножницы. При этом конец нити, идущей к челноку, отрезается, а конец нити, идущей в ткань, зажимается между плавкой 23 и пластинкой 22. Детектор 8 отходит в нерабочее положение, передавая нить в нитеуловитель, зажимающий нить, после чего подвижной нож 21 детектора отходит от неподвижного ножа 20, взаимодействуя с упорной планкой 26 грудницы 1 (см. фиг. 4).
Нитеуловитель 27 поворотно закреплен на оси 28 кронштейна 2 и снабжен сверху губкой 29 с фетровой накладкой. На оси 30 поворотно закреплена нижняя губка 31 с мелкой насечкой, снабженная на конце роликом 32, ось которого соединена пружиной 33 о нитеуловителем 27.
Нитеулоситель подводится в переднее положение пружиной 34, обернутой вокруг оси 28. Нижняя губка 31 нитеуловителя 27 управляется профилированным отростком рычага 5 вилочного валика 4, взаимодействующим с роликом 32 губки 31 и открывающим ее при рабочем положении детектора и закрывающим ее при нерабочем положении детектора.
Профиль отростка рычага 5 подобран так, чтобы при обратном ходе детектора обеспечить зажим нити между губками нитеуловителя несколько раньше открытия ножниц детектора 8.
1. Детектор к автоматическим ткацким станкам, управляемый вилочным валиком, переставной вдоль оси поворота передвижной направляющей и снабженный ножницами с зажимом и нитеуловителем, приводимыми в действие от батана, отличающийся тем, что для прилегания его к челноку при незначительном недолете последнего в коробку до установления кинематической связи детектора с вилочным валиком применен свободно сидящий на оси детектора угловой рычаг, одним концом варнирно соединенный с рычагом вилочного валика, а другим концом прилегающий к поворотному на его оси подпружиненному рычагу.
2. Детектор по п. 1, отличающаяся тем, что для управления подвижной губки нитеуловителя использован отросток рычага привода детектора, снабженный профилированным торцом, взаимодействующим с роликом губки.
3. Детектор по п. 1, отличающийся тем, что для регулирования положения детектора относительно оси его поворота на рычаге смонтирован установочный болт.
