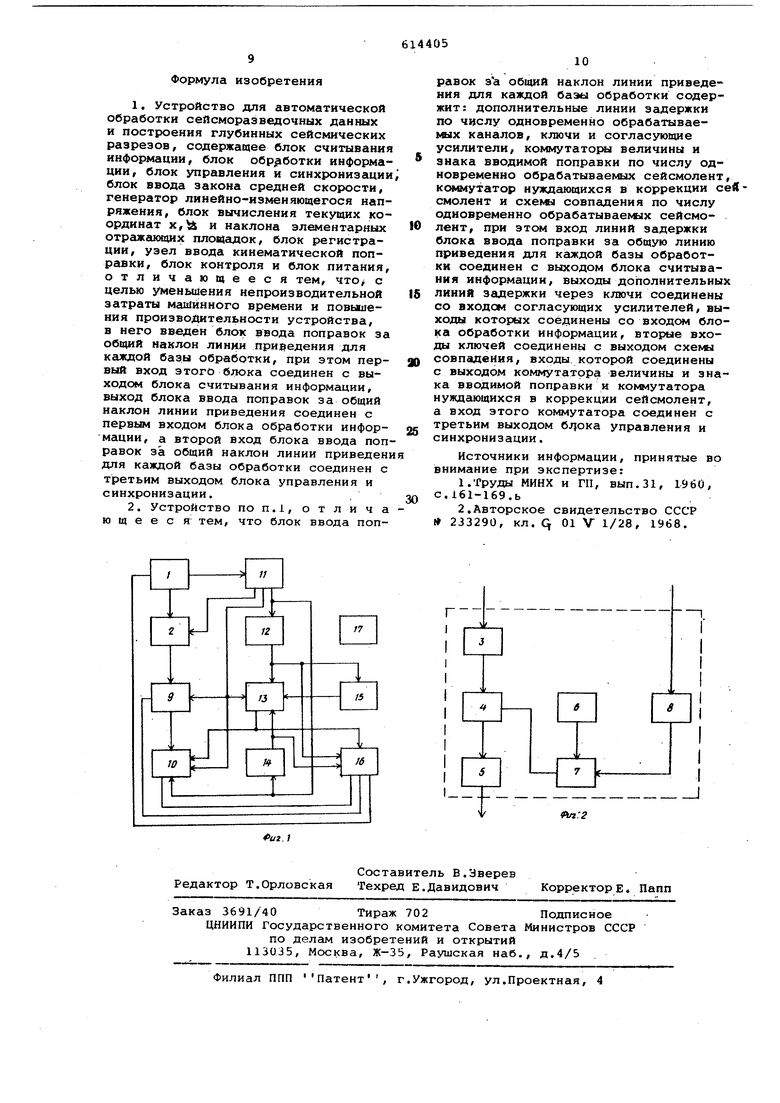
Изобретение относится к технике, применяемой при сейсмической разведке полезных ископаемых. Известны устройства аналогичного назначения например сейсмолокатор, состоящий из блока ввода информации, блока вычисления текущих координат х и 2 и наклона элементарных отражающих площадок, генератора линейно-изменяющегося напряжения, двух узлов произведения и умножения на постоянный коэ фициент, блока обработки, блока вывода информации и блока питания fl, Недостатки описанного устройства з ключаются в том, что построение разре осуществляется без ввода статических правок, а это приводит к плохому каче ву суммирования полезных сигналов и с ному разбросу элементарных отражающих площадок, принадлежащих одному горизонту. Кроме того, построение разреза непосредственно на трубке ограничивает протяженность построенного раз реза габаритами экрана электроннолучевой трубки. Элементарные отражающие площадки, с помощью которых в сейсмолокаторе строится сейсмический разрез изменяются по величине в зависимости от изменения глубины до отражающего горизонта, что также пр.иводит к искажениям. Наиболее близким по технической сущности к изобретению является устройство для автоматической обработки сейсморазведочных данных, содержащее блок считывания информации с оптических сейсмопленок, блок вычисления текущих координат X, 2, и наклона элементарных отражающих площадок, генератор линейноизменяющегося напряжения, блок обработки информации, блок управления и синхронизации, блок ввода закона средней скорости, блок контроля, блок регистрации и блок питания 2J. Это устройство автоматизирует обработку и построение сейсмических.разрезов по оптическим сейсмограммам, записанным в поле по системе наблюдений РНП с центральным расположением пунктов взрыва. Недостаток этого устройства заключается в значительной затрате машинного времени на поканальный ввод статических поправок при перезаписи полевого материала на барабан оперативной памяти блока считывания информации. Такая затрата машинного времени оправдана при нелинейном законе изменения статических поправок по профилю наблюдений. Однако на практике у значительной части полевого материала статические поправки для каждого канала вводятся исходя из линейной -интерполя ции разности времени между пунктами взрывов, В таких случаях затрата машинного времени на поканальный ввод статических поправок экономически не эффективна. Целью изобретения является уменьшение непроизводительной затраты машинного времени и повышение производи тельности устройства для автоматической обработки сейсморазведочных данных и построения глубинных сейсмических разрезов. Поставленная цель достигается введением в него блока ввода поправок за общий наклон линии приведения для каж дои базы обработки, при этом первый вход этого блока соединен с выходом блока считывания информации, выход блока ввода поправок соединен с первьви входом блока обработки информации а второй вход блока ввода поправок подключен к третьему выходу блока управления и синхронизации. Блок ввода поправок за общий наклон линии приведения для каждой базы обработки содержит дополнительные линии задержки по числу одновременно об рабатываемых каналов, ключи и согласу щие усилители, коммутаторы величины и знака вводимой поправки по числу одновременно обрабатываемых сейсмолен коммутатор нуждающихся в коррекции Сейсмолент и схемы совпадения по числ одновременно обрабатываемых сейсмолент . При этом вход линий задержки блока ввода поправки соединен с выход блока считывания информации, выходы дополнительных линий задержки чере ключи соединены со входом согласующих усилителей, выходы которых соедин ны со входом блока обработки информации. Вторые входы ключей соединены с выходом схемы совпадения, входы которой соединены с выходом коммутатора величины и знака вводимой поправки и коммутатора нуждающихся в коррекции сейсмолент, а вход этого коммутатора соединен с третьим выходом блока упра ления и синхронизации. На фиг.1 показана структурная схем устройства для автоматической обработ сейсморазведочных данных и построения глубинных сейсмических разрезов; на фиг.2 - структурная схема блока ввода поправок за общий наклон линии приведения для каждой базы обработки. Устройство содержит блок 1 считыва ,шя информации, предназначенный для считывания полевой информации с магнитных лент, для корректировки этой информации по амплитудам и статически поправкам, перезаписи откорректирова ной информации в оперативную память и последующего считывания ее с барабана оперативной памяти в определенно последовательности одновременно, напр мер, по 13 трассам. В блок считывания информации входят барабан для закрепления магнитной сейсмоленты, жестко связанный с барабаном оперативной памяти, электропривод с редуктором и узлом автоматического регулирования скорости вращения барабанов, смонтированные с зазором относительно образующих барабанов головки для считывания информации с полевой ленты, унивенсальные головки для записи и считывания информации с барабана оперативной памяти, узел для ее стирания, коммутаторы головок и режима работы, усилитель с коррекцией, узел автоматического и программного регулирования амплитуды сигналов, датчики формирования синхроимпульсов, узел ввода статиче 1шх поправок, аттенюаторы амплитуд сигналов. Блок 2 ввода поправок за общий наклон линии приведения для каждой базы обработки включен в устройство впервые. Он предназначен для одновременного ввода статических поправок, например, в 13 каналов по различным, например семи, линейно-изменяющимся законам приращения времени между соседними трассами базы обработки. Блок 2 состоит из дополнительных линий задержки 3, ключей 4, согласующих усилителей 5, коммутатора 6 величины и знака вводимой поправки, схемы совпадения 7 и коммутатора 8 нуждающихся в коррекции сейсмолент и баз обработки. Блок 9 обработки информации для обработки по алгоритму РНП группами, например, по 13 трасс всей информации, записанной на барабане оперативной памяти, выделения из нее по амплитудным, частотным и фазовым признакам полезных сигналов и формирования из них модулирующих импульсов с амплитудой, пропорциональной амплитуде зарегистрированных отраженных волн. Этот блок содержит 13 линий задержки, коммутатор точек съема сигналов с линий задержки, три операционных усилителя формирования сигналов б-ti.i 9 2:1Гб | ., rUfitJn, сдвинутых по времени относительно сигнала на один шаг суммирования ( 8t ) , три фильтра высоких и низких частот с коммутаторами выб.ора крутизны спада частотной :4арактеристики и граничных частот среза, узел выделения полезных сигналов и формирования из них модулирующих импульсов. Блок регистрации 10 предназначен ля фотографирования на фотопленку с экрана электроннолучевой трубки сейсмического разреза по профилю протяжностью до 30 км (участками по информации от 5 сейсмограмм). Он содержит электроЕ:нолучевую трубку, операционные усилители отклонения луча по координатам X и 2; . узел формирования элементарных отражающих площадок, с помощью которых строится разрез, фильтр кажущихся скоростей, которыйсовместно с устройством обработки информации позволяет выделять сигналы на же лаемых участках лучевой -диаграммы, фотоприставку, позволяющую сфотографировать разрез по информации, обработанной при четырех разных параметрах обработки, узел управления работой фотоприставки, узел регистрации отснятых кадров. Блок И управления и синфхронизации предназначен для .формирования коммутирующих и синхронизирующих импульсов, обеспечивающих необходимый алгоритм; обработки и синхроннос работы устройства. Он содержит датчик синхроимпульсов, усилители-форми рователи синхроимпульсов, формирователи коммутирующих импульсов, формир ватель управляющих импульсов из сигналов отметки момента взрыва. Блок 12 ввода закона средней скор ти предназначен для формирования нап жения, изменяющегося во времени пропорционально закону изменения средне скорости распределения упругих волн с глубиной. Он содержит коммутационное поле набора закона средней скорости, узел нелинейности, операционные усилители, узел сравнения напряжений, усилитель мощности и сервопри вод для автоматического управления б ком нелинейности. Блок 13 вычисления текущих коорди нат х,2, и наклона элементарных отражающих площадок предназначен для фор мирования напря-жёний, пропорциональн в каждый момент времени значениям вычисляемых координат х,2 и наклону элементарных отражающих площадо-к. Он содержит три узла нелинейности, пять узлов деления - умножения. и операционные усилители. Генератор 14 линейно-изменяющегос напряжения предназначен для формирования напряжения , пропорционального .времени, в течение которого осуществ лена запись магнитной сейсмограммы. Он содержит узел выделения сигнала отметки момента взрыва, узел формиро вания линейно-изменяющегося напряжения различной длительности,,и усилитель мощности. Узел 15 формирования кинематической поправки предназначен для формирования напряжения, пропорциональног поправке Д;2( и содержит квадратор Ьоправкие/У1 и узел умножения н.а i . Блок контроля 16 предназначен для просмотра сигналов и контроля работы установки и содержит электроннолучевую трубку с длительным послесвечением, усилители горизонтального и вертикального отклонения луча и коммутатор контролируемых сигналов. Блок питания 17 предназначен для обеспечения устройства необходимыми напряжениями. В предлагаемом устройстве первый выход блока I считывания информации соединен с первым входом блока 2 ввода поправки за общий наклон линии приведения для каждой базы обработки, выход которого соединен с первым входом блока 9 обработки информации. Выход блока 9 соединен с первым входом блока регистрации 10. Второй выход блока 1 считывания информации соединен с входом блока 11 управления и синхронизации. Первый выход этого блока соединен со входом блока 12 ввода закона средней скорости, входом генератора 14 линейно-изменяющегося напряжения и четвертым входом блока регистрации 10. Второй выход блока 11 управления и синхронизации соединен со вторыми входами блоков 9,13 обрабЪтки информации и вычисления текущих координат х,2 и наклона элементарных отражающих площадок и третьим входом блока регистрации 10. Третий выход блока 11 управления и синхронизации соединен со вторым входом блока 2 ввода поправок за общую линию приведения для каждой базы обработки. Выход блока 12 ввода закона средней скорости соединен с первыми входами блока 13 вычисления текущих, координат x,z и наклона элементарных отражающих площадок, блока контроля 16 и узла 15 ввсда кинематической поправки. Выход узла 15 соединен с третьим входом блока 13 вычисления текущих координат х,2 и наклона элементарных отражающих площадок. Выход генератора 14 линейно-изменяющегося напряжения соединен с четвертыми входами блока контроля 16 и блока 13 вычисления текущих координат х, и наклона элементарных .отражающих плсндадок. Выход блока 13 соединен со вторыми входами блока контроля 16 и блока регистрации 10. Третий вход блока контроля 16 соединен с выходом блока регистрации 10, пятый вход блока -контроля 16соединен с выходом блока 9 обработки информации и шестой вход блока 1 считывания информации. Блок питания 17соединен со всеми блоками устройства. Устройство работает следующим образом. Магнитные сейсмограммы, записанные в поле на 24 канальных сейсмостанциях со скоростью транспортировки магнитной ленты относительно головки 50, 100 или 200 мм/с, закрепляютсяй поочередно на барабане с полевой лентой и с них считывается поканально вся информация при скорости траспортировки 1500,3000 или 6000 мм/с. Эта информация потрассно контролируется на экране блока контроля и при необходимости корректируется с помощью аттенюаторов уровней и узла ввода статических поправок. Откорректированная информация в автоматическом режиме переписывается на барабан оперативной памяти, с которого в режиме обработки информация считывается группами, например, по 13 трасс.Эти сигналы поступают на вход блок 2 ввода поправок на общий наклон линии приведения для каждой базы обработки, в котором с помощью, например 13 линий задержки 3, имеющих, например, по семи точек съема сигналов, ключей 4 и 13 согласующих усилителей 5 создается искусетвенньай временной сдвиг сигналов, корректирукмдий наклон оси синфазности на сейсмограммах. Коммутаторами б величин и знака поправки коммутаторами 8 нуждающихся в коррекции сейсмограмм и без обработки совместно со схемой совпадения 7 включаются ключи 4. С помощью их ко входу согласующих усилителей 5 подсоединяются точки съема сигналов с каждой линии задержки в соответствии с выбранными величиной и знаком корректирующей поправки. Каяздая точка съема сигнала с линии задержки моделирует один из наклонов корректирующей поправки. Количество ключей 4 определяется произведением числа линий задержки на количество точек съема с,1}гналов с каждой линии. . .
Откорректированн 1е сигналы с выхода блока 2 ввода поправки эа обдий наклон линии приведения ;цля каждой базы обработки поступают./на вход блока 9 обработки информации, где с помощью, например, 13 линий задержки, коммутаторов точек съема сигналов и, например, трех суммирующих усилителей формируются суммарные сигналы) сдвинутые по времени относительно друг друга на шаг суглмирования. Из них с помощью узла выделения полезных сигналов выделяется максимальный сигнал в каждом разрастании. Из этого максимального сигнала формируется модулирующий импульс, положение которого определяется временем вступления отраженной волны к центральному сейсмоприемнику базы обработки, исчисляемым от импульса отметки момента взрыва, зафиксированного на сейсмограмме. Модулирующий импульс с выхода блока 9 обработки информации поступает на вход блока регистрации 10
Одновременно со считыванием с барабана оперативной памяти информации сейсмотрасс с него считываются импульс отметки момента взрыва и синхроимпульс Из синхроимпульса формируются переключающие напряжения, которые с периодичностью, обусловленной алгоритмом работы устройства, переключают коммутирующие узлы в блоках обработки ифнормации 9, регистрации 10 и блоке 13 вычисления текущих координат X и 2. . Из импульса отметки момента взрыва формируется управляющий сигнал, который поступает на вход блока регистрации 10, блока 12 ввода закона средней скорости и генератора 14 линейно-изменяющегося напряжения. Этот управляющий сигнал обес8.
ечивает жесткую временную привязку омента начала работы этих блоков.
Сформированный импульс отметки моента взрыва с выхода блока 11 ynpaBv ения и сихронизации поступает на вход генератора 14 линейно-изменяюегося напряжения и запускает его.
Генератор 14 вырабатывает пилообразное напряжение, длительность которого пропорциональна длительности полезной информации, записанной на магнитной сейсмоленте с учетом козффициента трансформации времени при перезаписи сигналов с барабана оперативной памяти. Это напряжение поступает на четЕе1 тый вход блока 13 вычисления координат х, ,и наклона элементарных отраж ающих площадок, в котором вычисляются значения текущих координат точки на лю.бом из 25 лучевой диаграммы, в любой момент текущего времени i. . Вычисленные значения в виде напряжений-аналогов кооринат X и 2; подаются на входы операционных усилителей блока регистрации 10. С помощью этих напряжений на экране трубки блока регистрации строится лучевая диаграмма, состоящая из 25 лучей, из которых 12 лучей соотвеаствуют положительному наклону оси синфазности, 12 лучей - отрицательному наклону и 1 луч - нулевому наклону оси синфазности. Поступающий с выхода блока обработки информации модулирующий импульс засвечивает участок лучевой диаграммы в виде элементарной площадки, перпендикулярной лучу, по длине равный половине длины базы обработки в масштабе построения разреза, а по времени соответствующий времени вступления отраженного сигнала к центральному сейсмоприемнику базы обработки. Каждая 24-кана льная магнитная сейсмограмма разбивается на три группы по 13 трасс в каждой, называемых базой обработки, а так как одновременно ведется обработка информации от пяти пленок, то на экране блока регистрации строится в определенной последовательности .15 лучевых диаграмм. Каждая лучевая диаграмма строится из пункта профиля, соответствующего центральному сейсмоприемнику каждой базы обработки. На построение 15 лучевых диаграмм затрачивается 75 с реального времени. Это время и является полным временем обработки информации со 120 трасс, т.е. с пяти магнитных сейсмолент, и построения по ней глубинного сейсмического разреза.
Предлагаемое устройство позволяет сократить время корректировки сигнаов статическими поправками примерно в 10 раз, так Как вместо поканального ввода поправок в. 13 трасс 13 переключателями достаточно изменить положение одного переключателя и получить тот же эффект.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматической обработки сейсморазведочных данных и построения глубинных сейсмических разрезов | 1976 |
|
SU646289A1 |
| Устройство автоматической обработки сейсморазведочных данных и построения сейсмических глубинных разрезов | 1976 |
|
SU735954A1 |
| Устройство для автоматической обработки сейсморазведочных данных и построения глубинных сейсмических разрезов | 1976 |
|
SU650036A1 |
| Счетно-решающая установка для обработки сейсморазведочных данных и автоматического построения на фотопленке | 1966 |
|
SU233290A1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ОБРАБОТКИ СЕЙСМОРАЗВЕДОЧНЫХ ДАННЫХ | 1969 |
|
SU233289A1 |
| УСТРОЙСТВО СЧИТЫВАНИЯ и ПРЕОБРАЗОВАНИЯ | 1964 |
|
SU164718A1 |
| СПОСОБ ОБРАБОТКИ СЕЙСМОГРАММ | 1970 |
|
SU287330A1 |
| Устройство для преобразования сейсмической информации | 1977 |
|
SU693300A1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ВОСПРОИЗВОДИМЫХ СЕЙСМОГРАММ | 1973 |
|
SU375603A1 |
| Способ определения углов наклона отражающих границ в геологической среде по данным профильной сейсморазведки 2D | 2018 |
|
RU2692001C1 |
