(54) ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В КОД
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь угла поворота вала в код | 1978 |
|
SU744698A1 |
| Преобразователь угла поворота вала в код | 1978 |
|
SU752423A1 |
| Преобразователь угла поворота вала в код | 1977 |
|
SU703853A1 |
| Преобразователь угла поворота вала в код | 1984 |
|
SU1264343A1 |
| Способ преобразования угла поворота вала в код | 1976 |
|
SU601729A1 |
| Преобразователь угла поворота вала в код | 1976 |
|
SU599276A1 |
| Преобразователь угла поворота вала в код | 1977 |
|
SU746656A1 |
| Способ преобразования угла поворота вала в код | 1988 |
|
SU1786662A1 |
| Преобразователь угла поворота вала в код | 1983 |
|
SU1145479A1 |
| Преобразователь угла поворота вала в код | 1985 |
|
SU1283968A1 |
Изобретение относится к автоматике и вычислительной технике, в частности, к преобразователям аналоговой величины в крд, VI может быть использовано для связи аналоговых источников информации с цифровым вычислительным устройством.
Известны преобразователи угла поворота вала в код. Одни известные преобразователи содержат укрепленную на валу периодическую кодовую шкалу и укрепленные на корпусе чувствительные элементы, подключенные к усилителям flj. Они сложны и имеют большие габариты, необходимые для обеспечения высокой точности. Другие известные преобразователи содер жат источник постоянного.тока,подключенный к фазовому датчику угла с механическим модулятором. Выход датчика угла подключен к фазометру 2, . Эти . .известные преобразователи имеют низкое быстродействие и большие динамические погрешности. Наиболее близким к H3ot ipe-теввк) техническим решением является преобразователь угла поворота вала в код, содержащий источник переменного напря-п
жения, подключенный к синусно-косинусному датчику, выходы которого через коммутатор пoдклюfчeны к блоку преобра-г зования амплитудно-модулированных сипналов в код. Синусно-косинусный датчик работает в режиме пульсирующего поля. Модулированные по амплитуде выходные сигналы синусно-косинусного датчика преобразуются в код путем промежуточного преобразования -в постоянное напряжение 41. Этот преобразователь характеризуется погрешностью квантования по углу и времени. Погрешность квантования по углу соответствует единице младшего разряда выходного кода. Погрешность квантования по времени выявляется при вращении входного вала и соответствует произведению угловой скорости вала на минимальное время между двумя соседними опросами.
Целью изобретения является повышение точности преобразователя. В предложенном преобразователе это достигается тем, что в него введены источник постояного напряжения, дополнительный комму-
татор и блок формирования кода угла накапливающего типа, эыходы источников постоянного и повременного напряжения подключены черев дополнительный комму татор к входу синусно-.косинусного датчик другой выход коммутатора подключен к входу блока формирования кода угла накапливакядего типа, а управляющие входы коммутаторов соединены со входом преобразователя.
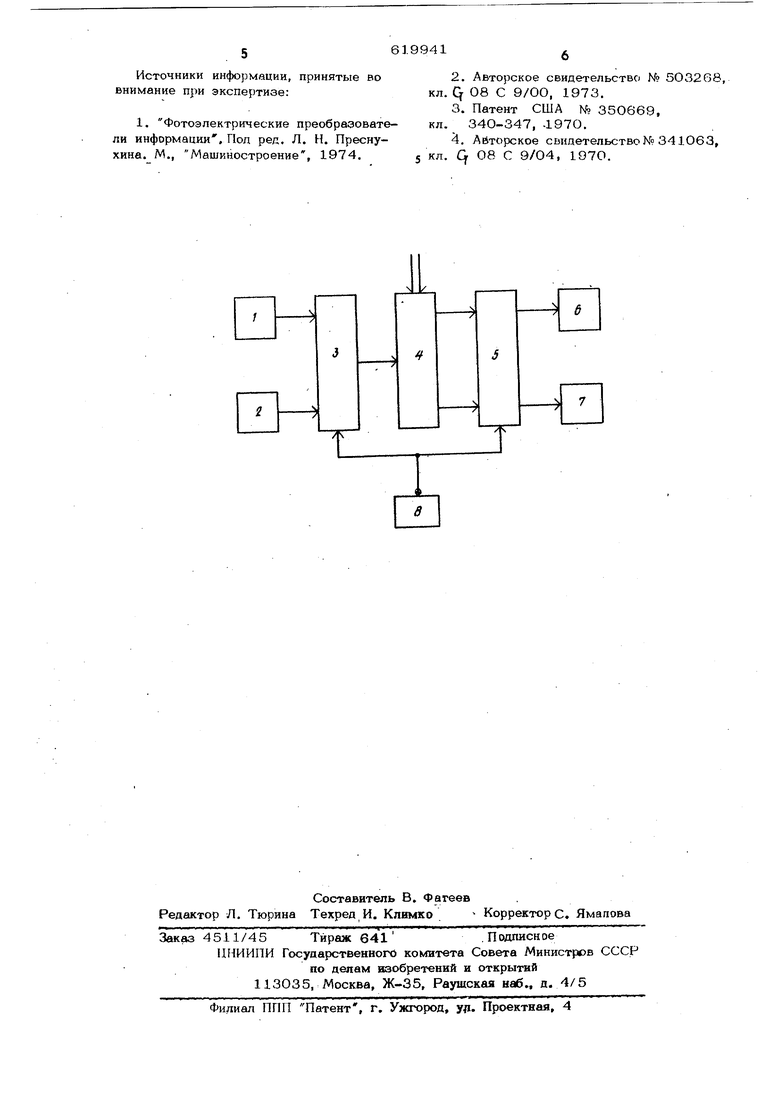
На чертеже представлена структурная схема преобразователя. В преобразователе источник 1 переменного напряжения и источник 2 постоянного напряжения подключены через допол-ннфельвый коммутатор 3 ксинусно-косинусному датчику 4, выходы которого через коммутатор 5 Подключены к блоку 6 преобразования амплитудно-модулированных сигналов в код и к блоку 7 формирования кода угла накапливающего типа, управляю щие входы коммутаторов 3 и 5 соединены с выходом формировагепя 8 команды.
При измерении угла в статическом состоянии или при переменной скорости вращения вала, когда не предъявляются жест кие,-требования к динамической погрешности преобразователя, подается соответсвующая команда с формирователя 8 на коммутаторы 3 и 5, Синусоидальный сигнал с выхода источника 1 переменного напряжения поступает на вход синусно-косинусного датчика 4, например на обмотку возбуждения.индукционного редуктосина. На выходе синусно-косинусного датчика 4 вырабатываются переменные синусоидальные сигналы, модулированные по амплитуде в функции угла поворота по закону синуса и косинуса. Выходные сигналы синусно-косинусного датчика 4 через коммутатор 5 поступают в блок б, где пре.образуются в код путем промежуточного Преобразования в фазу и временной интервал или путем промежуточного преобразо ваШ{я в постоянное напряжение.
При измерении угла при вращении вала со скоростью, близкой к постоянной величине, например при определении времени поворота вала на угол, кратный полюсно му делению синусно-косинусного датчика 4, или при измерении средней скорости вращения вала, коммутаторы 3 и 5 уста-, навливаются командой с формирователя 8 в такое попожение, при. котором на обмотку возбуждения синусно-косинусного датчика 4 поступает постоянное напряжение, а выходные обмотки синусно-;Косинусного датчика 4 подключены к блоку 7 формирования кода угла накапливающего типа. При вращении с постоянной скоростью вала синусно-косинусного датчика|
4на его выходах формируются переменные сигналы, близкие к синусоидальным, с постоянной амплитудой и сдвинутые по фазе наЦ/З .
Круговая частота выходных сигналов синусно-косинусного датчика 4 равна произведению угловой скорости вала на число пар полюсов синусно-косинусного датчика 4.
Выходные сигналы синусно-косинусного датчика 4 поступают через коммутатор
5на блок 7, в состав которого входят компараторы, вырабатывающие импульсы
в моменты переходов синусоидапьных сигналов через нулевое значение, логический блок формирования импульсов приращения угла в соответствии с направлением вращения и реверсивный счетчик. В реверсивном счетчике формируется код угла поворота вала с момента начала работы в данном режиме. При этом каждая единица приращения кода на реверсивном счетчике, соответствует одному кванту изменения угла. В таком режиме кванто- вания по времени нет и угловой погрешности, соответствующей квантованию по времени, что в целом повышает точность преобразователя угла в код.. .
Использование предложенного устройства позволяет получить высокзто точност измерения угла в широком диапазоне изменения угловой скорости. Для этого не требуется установка на вал дополнительного датчика, что упрощает оборудование и снижает экономические затраты.
Формула изобретения Преобразователь угла поворота вала в код, содержащий источник переменного напр51жениЯ| синусно-косинуснЫй датчик, выходы которого через коммугагор подключены к бпоку преобразования ампшв тудно-модулированных сигналов в код, отл ич ающи йс я гем, чго, с целью повышения точности преобразователя, в негб введены источник постоянного напряжения, дополнительный коммутатор и блок формирования кода угла накапливающего типа, выходы источников постоянного и переменного напряжения подключены через дополнительный коммутатор к входу синусно-косинусного датчика, другой выход коммутатора подключен к входу блока формирования кода угла накапливающего типа, а управляющие входы коммутаторов соединены со входом преобразователя.
Источники информации, принятые во внимание при экспертизе:
