(один непосредственно, а другой - через регистр запоминания), а выход регистра зычитания соединен со входом регистра суммирования. Выход последнего подключен к счетному механизму.
Предлагаемое устройство, по сравнению с известным, обеспечивает более высокую точность счета, поскольку возможность раздельной обработки эхо-сигналов от рыб, расположенных на малом расстоянии один от другого, определяется только разрешающей способностью гидролокатора и не требз-ет деления дистанций счета на отрезки с помощью селекторных импульсов, что также делает устройство универсальным по отношению к изменению щирины потока воды и размерного состава рыб. Информационно-логические преобразования ансамбля принятых эхо-сигналов производятся в цифровой форме, что упрощает устройство, так как резко сокращает количество ячеек, необходимое для указанных преобразований.
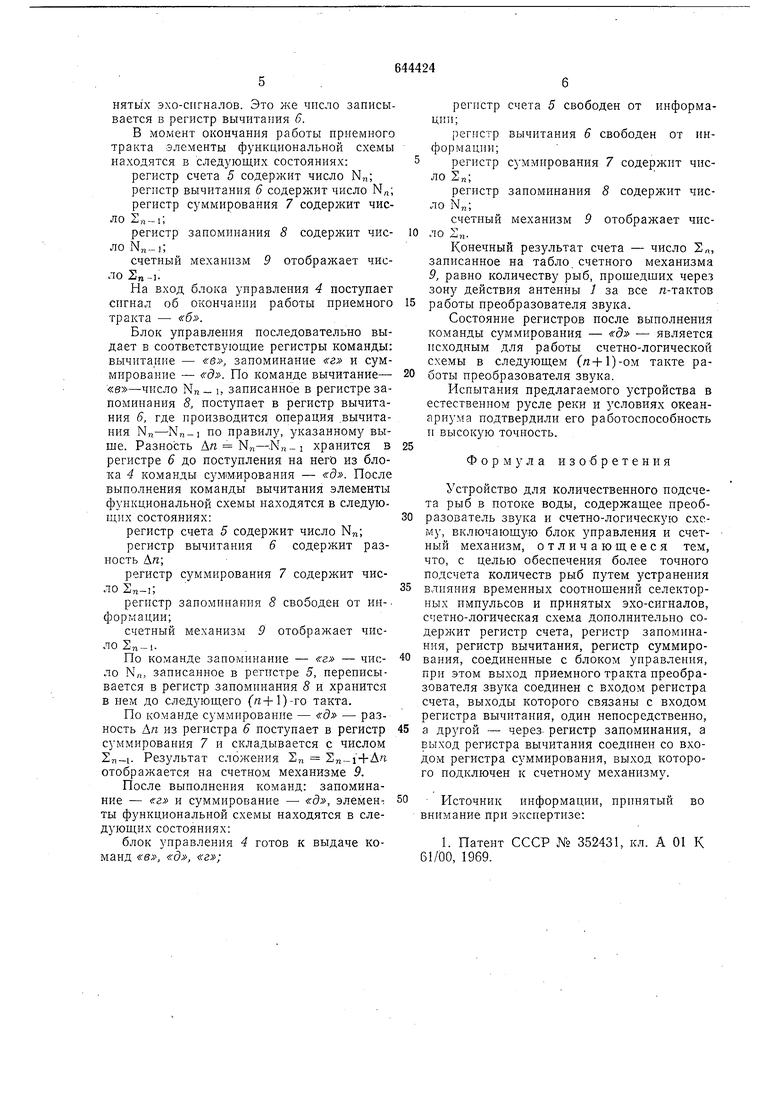
На фиг. 1 изображена схема устройства, на которой пути прохождения сигналов обозначены сплошными линиями, пути прохождения команд - пунктирными; но фиг. 2 изображены временные диаграммы, чоясияющие элементов функциональной схемы в течение одного такта работы гидролокатора,
где а - зондирующий имиульс гидролокатора и принятые эхо-сигналы от рыб;
б - сигнал об окончании работы приемного тракта;.
б - команда «вычитание ;
г - команда «запоминание ;
д - команда «суммирование.
Функциональная схема включает в себя гидроакустическую антенну 1, приемный тракт 2, передающий тракт 3, блок управления 4, регистр счета 5 регистр вычитания 6, регистр суммирования 7, регистр запоминания 8, счетный механизм 9. Элементы 1, 2, 3 составляют преобразователь .звука. Элементы 4, 5, 6, 7, 8, 9 - счетно-логическую схему.
Устройство работает следзаощим образом. Передающий тракт 3 генерирует зондирующий импульс. Принятые гидроакустической антенной 1 эхо-сигналы от рыб, находящихся в зоне действия аитенны, поступают на вход приемного тракта 2. С выхода приемного тракта на вход регистра счета 5 поступают импульсы, соответствующие принятым эхо-сигналам, и записываются в нем в виде числа М„, где N - количество принятых эхо-сиП алов, an - гомер такта работы преобразователя звука.
Это же число N одновременно записывается в регистр вычитания 6.
После окончания работы приемного тракта сигнал об окончании работы приемного тракта «б запускает блок управления 4, который последовательно выдает в соответствующие регистры команды: вычитание «в, запоминание «г и суммирование «д (фиг. 2).
По команде вычитание - выхода регистра запоминания 8 на вход регистра вычитания 6 постуиает число Nn-i, равное числу принятых эхо-сигналов в предыдущем (п-1) такте работы преобразователя зв)ка. Результатом выполнения команды вычитания является число -N,, 1, равное разности между числом эхосигиалов, принятых в настоящем л-ом такте и числом эхо-сигналов, принятых в предыдущем (п-1)-ом такте работы преобразователя звука. Операция вычитания производится по следующему правилу:
Д я О, если N« N„-1 Д/г 0, если ,,i.
По команде запоминание - выхода регистра счета 5 на вход регистра запомииания 8 поступает число М„ и запоминается в нем до следующего (ft+I)-ro такта. .. По команде суммирование - «д - с выхода регистра вычитания 6 на вход регистра суммирования 7 поступает число Art, которое складывается с суммой разностей за все предыдущие такты, равной
УЛ-1 -- + Д«-2 -Г .- Д Полученное в резЗльтате сложения число 2.« - 2-1 -г Д« отображается на табло счетного механизма 9, На этом заверщается л-й такт работы устройства. В следующем
(ra+l)-OM такте повторяются все операции, описанные выще.
Процесс работы устройства в данном (л-ом) такте работы гидролокатора поясняется временными диаграммами (фиг. 2).
В момент посылки зондирующего импульса «а локатора, элементы функциональной схемы находятся в следующих состояниях: блок управления 4 готов к выдаче команд «в, «г,
регистр счета 5 свободен от ииформации;
регистр вычитания 6 свободен от информации;
регистр суммирования 7 содержит число , равное сзмме разностей за все предыдущие такты;
регистр запоминания 5 содержит число равное числу рыб, находящихся в зоне действия антенны в (п-1)-ом такте;
счетный механизм 9 отображает число
2,-1.
После излучения зондирующего импульса на вход регистра счета 5 поступают эхосигналы от рыб «а и записываются в нем 65 в виде числа Nn, равного количеству принятых эхо-сигналов. Это же число записывается в регистр вычитания 6.
В момент окончаиия работы ириемного тракта элементы функциональной схемы находятся в следующих состояниях: регистр счета 5 содержит число Ы„; регистр вычитания 6 содержит число Н„; регистр суммирования 7 содержит число 2„-1;
регистр запоминания 8 содержит число Nn-i;
счетный механизм 9 отображает число
На вход блока управления 4 поступает сигнал об окончании работы приемного тракта - «б.
Блок управления последовательно выдает в соответствующие регистры команды: вычитание - «в, запоминание «г и суммирование - «д. По команде вычитание- «е -число Nn - 1, записанное в регистре запоминания 8, поступает в регистр вычитания 6, где производится операция .вычитания NT,-Nn-i по правилу, указанному выше. Разность Дп Nn-.N„-1 хранится в регистре 6 до поступления на него из блока 4 команды сум1мирования - «д. После выполнения команды вычитания элементы функциональной схемы находятся в следующих состояниях:
регистр счета 5 содержит число NK, регистр вычитания 6 содержит разность Д«;
регистр суммирования 7 содержит число Hn-i;
регистр запоминания 8 свободен от информации;
счетный механизм 9 отображает число .
По команде запоминание - «г - число Nn, записанное в регистре 5, переписывается в регистр запоминания 5 и хранится в нем до следующего («+1)-го такта.
По команде суммирование - «д - разность Дл из регистра 6 поступает в регистр суммирования 7 и складывается с числом 2„-1. Результат сложения 2п отображается на счетном механизме 9.
После выполнения команд: запоминание - «г и суммирование - «д, элементы функциональной схемы находятся в следующих состояниях:
блок управления 4 готов к выдаче команд «в, «д,
регистр счета 5 свободен от информации;
регистр вычитания 6 свободен от информации;
5 регистр суммирования 7 содержит число Sn;
регистр запоминания 8 содержит число М„;
счетный механизм 9 отображает чис10 ло 2„.
Конечный результат счета - число 2„.,
записанное на табло счетного механизма
9, равно количеству рыб, прошедших через
зону действия антенны 1 за все /г-тактов
15 работы преобразователя звука.
Состояние регистров после выполнения
команды суммирования - «д - является
исходным для работы счетно-логической
схемы в следующем (/1+1)-ом такте ра0 боты преобразователя звука.
Испытания предлагаемого устройства в естественном русле реки и условиях океанариума подтвердили его работоспособность и высокую точность. 5
Формула изобретения
Устройство для количественного подсчета рыб в потоке воды, содержащее преобразователь звука и счетно-логическую схему, включающую блок управления и счетный механизм, отличающееся тем, что, с целью обеспечения более точного подсчета количеств рыб путем устранения
5 влияния временных соотношений селекторных импульсов и принятых эхо-сигналов, счетно-логическая схема дополнительно содержит регистр счета, регистр запоминания, регистр вычитания, регистр суммирования, соединенные с блоком управления, при этом выход приемного тракта преобразователя звука соединен с входом регистра счета, выходы которого связаны с входом регистра вычитания, один неиосредственно,
а другой - через- регистр запоминания, а выход регистра вычитания соединен со входом регистра суммирования, выход которого подключен к счетному механнзму.
Источник информации, принятый во внимание при экспертизе:
1. Патент СССР № 352431, кл. А 01 К 61/00, 1969.
РиеЛ

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подсчета рыб в потоке воды | 1985 |
|
SU1242083A1 |
| Устройство для подсчета молоди рыб в потоке воды | 1980 |
|
SU920787A1 |
| Устройство для селективного подсчета рыб в потоке воды | 1985 |
|
SU1319053A1 |
| УСТРОЙСТВО ДЛЯ ПОДСЧЕТА РЫБ В ПОТОКЕ ВОДЫ | 1994 |
|
RU2062572C1 |
| Устройство для счета молоди рыб в трубопроводе | 1981 |
|
SU970408A1 |
| Устройство для ультразвукового контроля структурного состояния материала | 1975 |
|
SU679867A1 |
| СПОСОБ ЧАСТИЧНО-КОГЕРЕНТНОЙ ОБРАБОТКИ ЭХОСИГНАЛА ОТ ЗОНДИРУЮЩЕГО РАДИОИМПУЛЬСА С ЧАСТОТНОЙ МОДУЛЯЦИЕЙ | 2024 |
|
RU2837070C1 |
| ИМИТАТОР ЭХОСИГНАЛА ЭХОЛОТА | 2015 |
|
RU2604170C1 |
| Гидролокатор кругового обзора автономного необитаемого подводного аппарата | 2020 |
|
RU2754604C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ДИСТАНЦИЙ ДО КРОМОК СУДОХОДНОЙ ПОЛОСЫ И ОБНАРУЖЕНИЯ ПРЕПЯТСТВИЙ НА НЕЙ | 1991 |
|
RU2006874C1 |
-f -t
