1
Устройство предназначено для использования в системах автоматического контроля и управления движением транспортных подвижных единиц.
Известно устройство для определения паправления движения транспортного средства. Оно содержит воспринимающие элементы линейного перемещения, выполненные в виде дифференциальных трансформаторов с магнитопроводом. Первичная обмотка магнитопровода подключена к генератору переменного тока, а сигнальные и компенсирующие обмотки соединены между собой с нагрузкой и с ключевыми схемами, выполненными на транзисторах и диодах, причем сердечник магнитопровода разделен воздущными промежутками на равные части, образующие разделенные компенсирующую и рабочую ветви 1.
Недостатками известного устройства являются СЛОЖНОСТЬ построения воспринимающих элементов и в связи с этим недостаточная надежность действия.
Целью изобретения является повышение надежности устройства.
Цель изобретения достигается тем, что одна часть разделенной рабочей ветви магнитопровода снабжена рабочей сигнальной обмоткой, другая часть рабочей ветви магнитопровода снабжена дополнительной сигнальной обмоткой, а обе части магнитопровода снабжены рабочей секцией первичной обмотки, одна часть компенсирующей ветви магнитопровода снабжена компенсирующей
сигнальной обмоткой, а обе ее части снабжены также общей компенсирзющей секцией первичной обмотки, причем сигнальные обмотки соединены звездой, другой конец компенсирующей сигнальной обмотки соединен с эммитерами ключевых транзисторов, коллектор-эммитерные переходы которых через нагрузку и диоды соединены с компенсирующей секцией первичной обмотки, база одного транзистора соединена с
концом рабочей сигнальной обмотки, а база другого соединена с дополнительной сигнальной обмоткой.
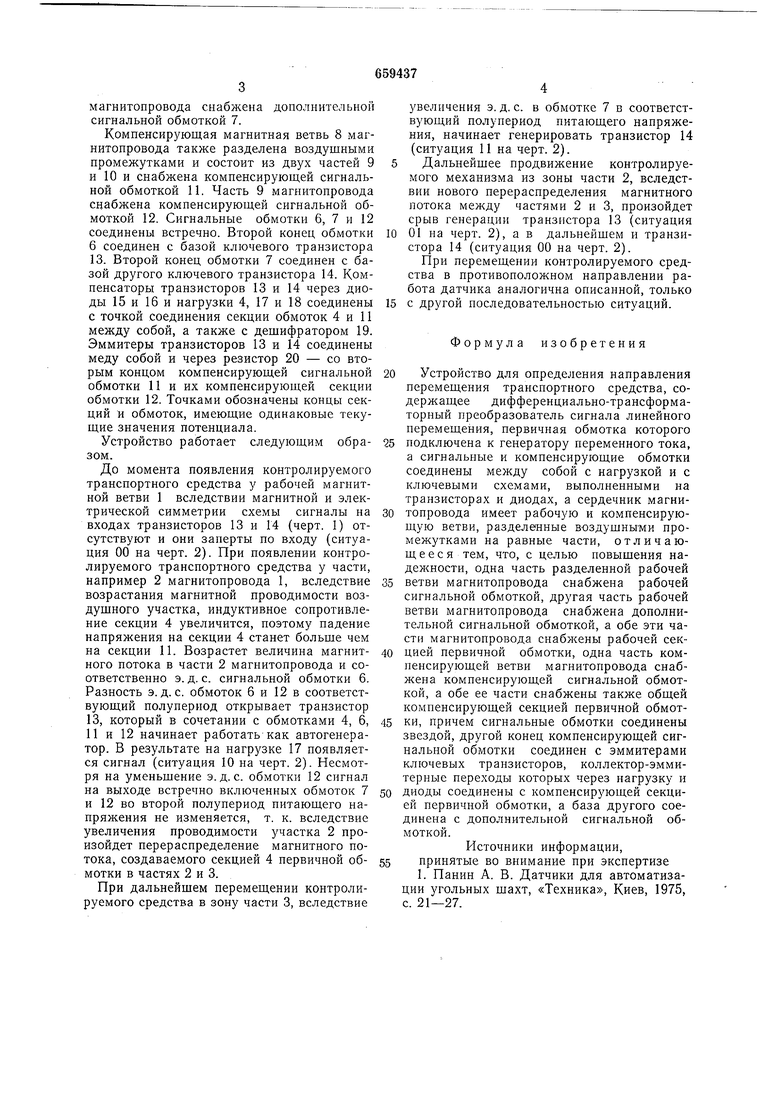
На фиг. 1 представлена принципиальная электрическая схема устройства; на фиг. 2
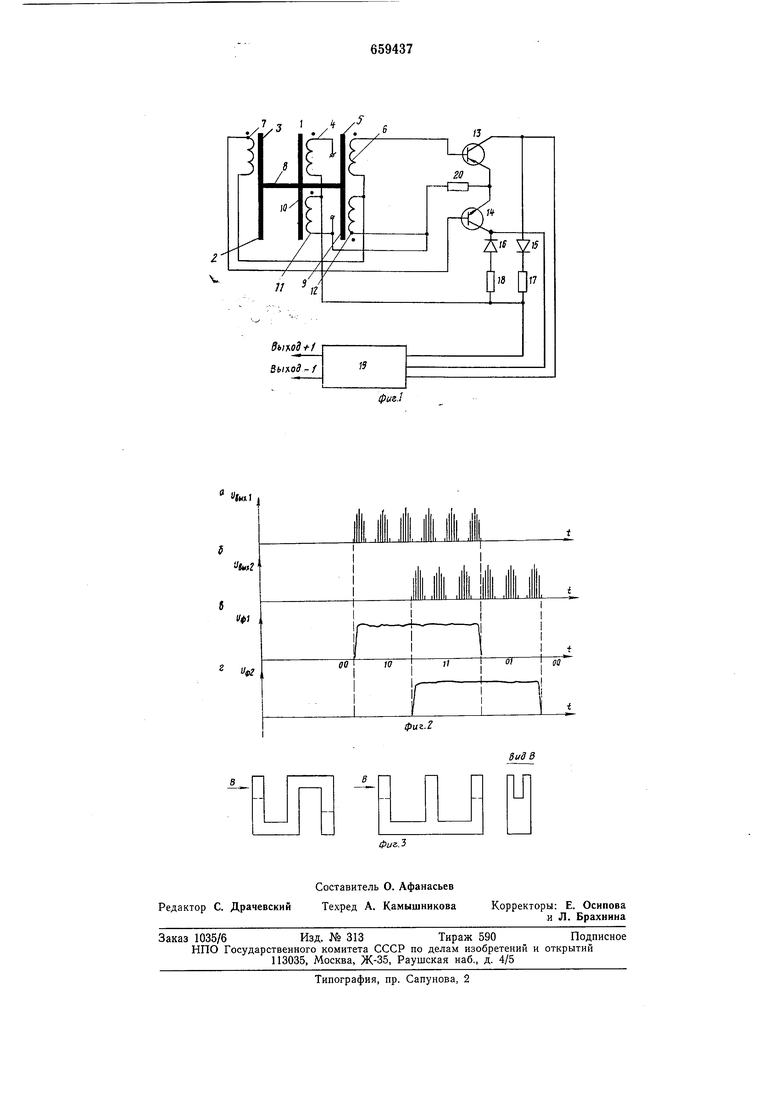
изображена диаграмма выходных сигналов; на фиг. 3 приведен пример выполнения раздельных магнитных ветвей магнитопровода.
Устройство содержит разветвленный магнитопровод 1, рабочая магнитная ветвь которого разделена воздущными промежутками на равные части 2 и 3 и снабжена рабочей секцией первичной обмотки 4. Одна часть 5 магнитопровода снабжена рабочей сигнальной обмоткой 6, а другая часть 3
магнитопровода снабжена дополнительной сигнальной обмоткой 7.
Компенсирующая магнитная ветвь 8 магнитопровода также разделена воздушными промежутками и состоит из двух частей 9 и 10 и снабжена компенсирующей сигнальной обмоткой 11. Часть 9 магнитопровода снабжена компенсирующей сигнальной обмоткой 12. Сигнальные обмотки 6, 7 и 12 соединены встречно. Второй конец обмотки 6 соединен с базой ключевого транзистора 13. Второй конец обмотки 7 соединен с базой другого ключевого транзистора 14. Компенсаторы транзисторов 13 и 14 через диоды 15 и 16 и нагрузки 4, 17 и 18 соединены с точкой соединения секции обмоток 4 и 11 между собой, а также с дещифратором 19. Эммитеры транзисторов 13 и 14 соединены меду собой и через резистор 20 - со вторым концом компенсирующей сигнальной обмотки 11 и их компенсирующей секции обмотки 12. Точками обозначены концы секций и обмоток, имеющие одинаковые текущие значения потенциала.
Устройство работает следующим образом.
До момента появления контролируемого транспортного средства у рабочей магнитной ветви 1 вследствии магнитной и электрической симметрии схемы сигналы на входах транзисторов 13 и 14 (черт. 1) отсутствуют и они заперты по входу (ситуация 00 на черт. 2). При появлении контролируемого транспортного средства у части, например 2 магнитопровода 1, вследствие возрастания магнитной проводимости воздущного участка, индуктивное сопротивление секции 4 увеличится, поэтому падение напряжения на секции 4 станет больше чем на секции И. Возрастет величина магнитного потока в части 2 магнитопровода и соответственно э. д. с. сигнальной обмотки 6. Разность э. д. с. обмоток 6 и 12 в соответствующий полупериод открывает транзистор 13, который в сочетании с обмотками 4, 6, 11 и 12 начинает работать как автогенератор. В результате на нагрузке 17 появляется сигнал (ситуация 10 на черт. 2). Несмотря на уменьшение э.д. с. обмотки 12 сигнал на выходе встречно включенных обмоток 7 и 12 во второй полупериод питающего напряжения не изменяется, т. к. вследствие увеличения проводимости участка 2 произойдет перераспределение магнитного потока, создаваемого секцией 4 первичной обмотки в частях 2 и 3.
При дальнейшем перемещении контролируемого средства в зону части 3, вследствие
увеличения э.д. с. в обмотке 7 в соответствующий полупериод питающего напряжения, начинает генерировать транзистор 14 (ситуация И на черт. 2).
Дальнейщее продвижение контролируемого механизма из зоны части 2, вследствии нового перераспределения магнитного потока между частями 2 и 3, произойдет срыв генерации транзистора 13 (ситуация
01 на черт. 2), а в дальнейшем и транзистора 14 (ситуация 00 на черт. 2).
При перемещении контролируемого средства в противоположном направлении работа датчика аналогична описанной, только
с другой последовательностью ситуаций.
Формула изобретения
Устройство для определения направления перемещения транспортного средства, содержащее дифференциально-трансформаторный преобразователь сигнала линейного перемещения, первичная обмотка которого
подключена к генератору переменного тока, а сигнальные и компенсирующие обмотки соединены между собой с нагрузкой и с ключевыми схемами, выполненными на транзисторах и диодах, а сердечник магнитопровода имеет рабочую и компенсирующую ветви, разделенные воздушными промежутками на равные части, отличающееся тем, что, с целью повышения надежности, одна часть разделенной рабочей
ветви магнитопровода снабжена рабочей сигнальной обмоткой, другая часть рабочей ветви магнитопровода снабжена дополнительной сигнальной обмоткой, а обе эти части магнитопровода снабжены рабочей секцией первичной обмотки, одна часть компенсирующей ветви магнитопровода снабжена компенсирующей сигнальной обмоткой, а обе ее части снабжены также общей компенсирующей секцией первичной обмотки, причем сигнальные обмотки соединены звездой, другой конец компенсирующей сигнальной обмотки соединен с эммитерами ключевых транзисторов, коллектор-эммитерные переходы которых через нагрузку и
диоды соединены с компенсирующей секцией первичной обмотки, а база другого соединена с дополнительной сигнальной обмоткой.
Источники информации,
принятые во внимание при экспертизе
1. Панин А. В. Датчики для автоматизации угольных шахт, «Техника, Киев, 1975, с. 21-27.
,7..4 I Л
zV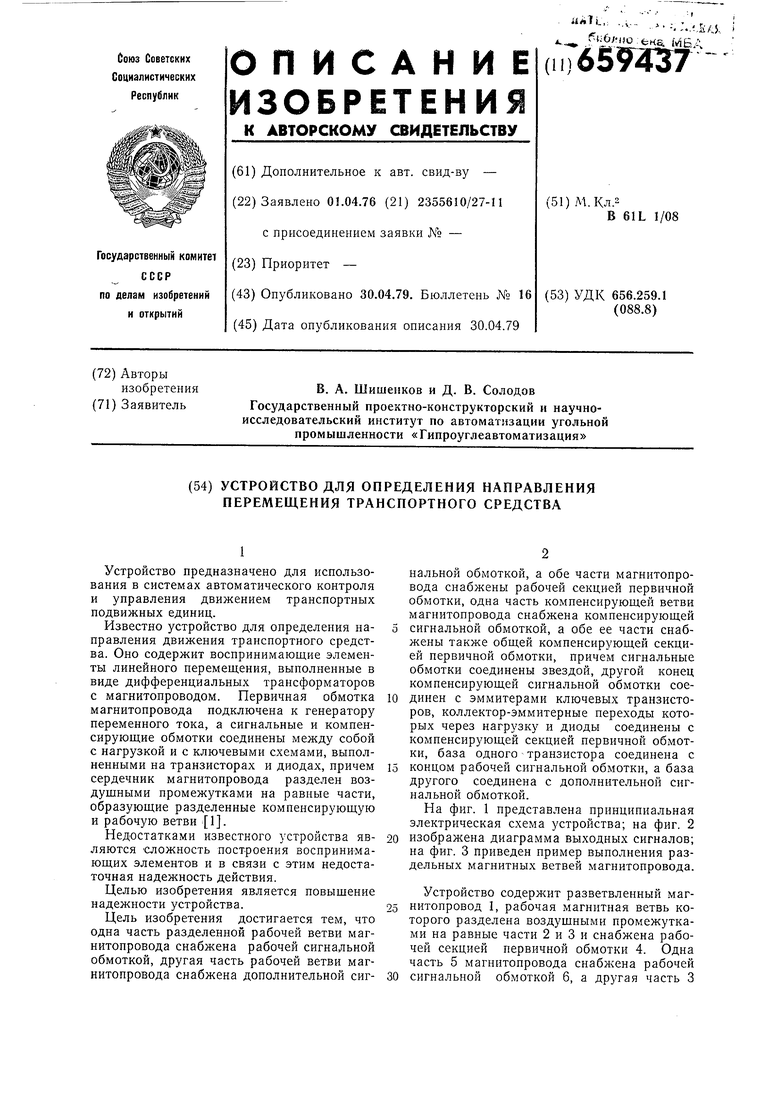
| название | год | авторы | номер документа |
|---|---|---|---|
| Бесконтактный трансформаторный переключатель | 1973 |
|
SU543827A1 |
| Путевой датчик | 1978 |
|
SU844435A1 |
| Электромагнитный датчик положения перемещающегося объекта | 1978 |
|
SU672630A1 |
| ИМПУЛЬСНЫЙ СТАБИЛИЗАТОР ТОКА | 2002 |
|
RU2234790C2 |
| Стабилизирующий преобразователь напряжения постоянного тока | 1990 |
|
SU1705985A1 |
| Стабилизатор постоянного регулируемого тока | 1990 |
|
SU1728853A1 |
| Устройство для токовой защиты от повреждений в сети переменного тока | 1986 |
|
SU1520620A1 |
| Устройство для преобразования переменного тока в пульсирующий со стабилизацией средней составляющей | 1986 |
|
SU1381458A1 |
| Ультразвуковой генератор с автоподстройкой частоты | 1976 |
|
SU557825A1 |
| Устройство для защиты трехфазного электродвигателя от анормального режима | 1984 |
|
SU1196992A1 |
1/
V
-1or
W
