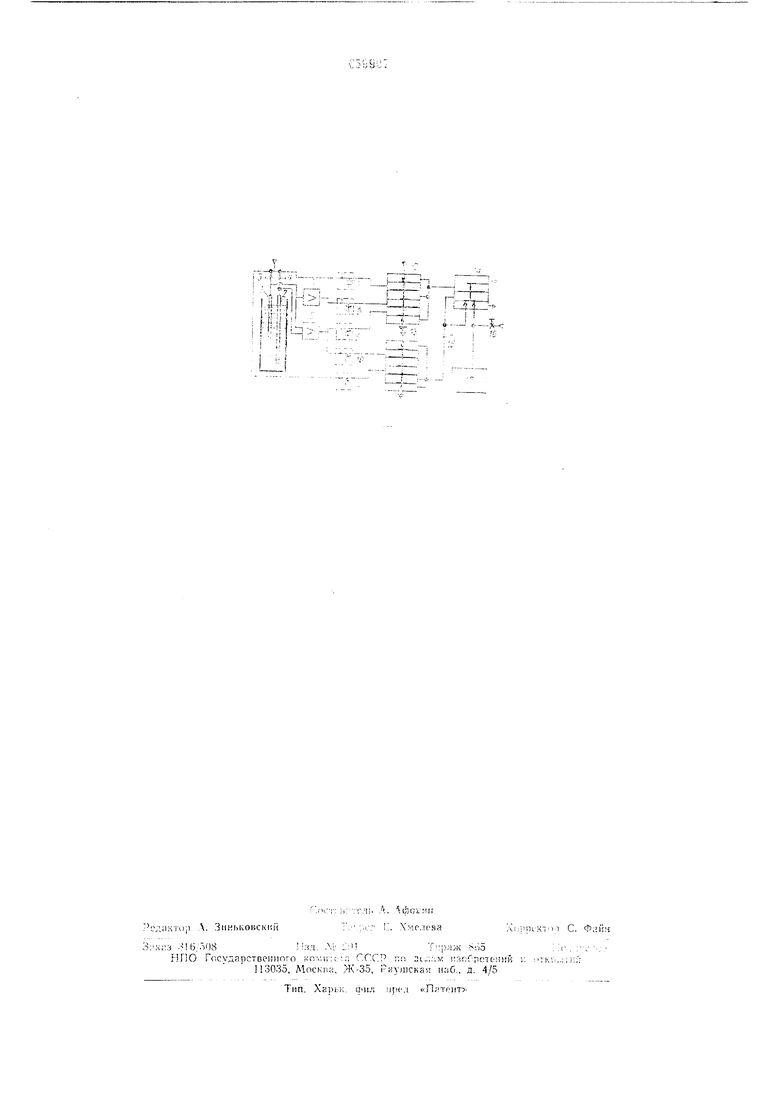
основного усилителя и линией подачи сжатого (Воздуха. На чертеже приведена принципиальная пневматическая схема урОБнемера. Пневматический уровнемер жидких сред содержит пьезометрические датчики / и 2, соединенные через регулируемые дроссели 3 и 4 СО стабилизированиым источником питания сжатого воздуха. Пьезометрический датчик / соединен импульсной линией с входами усилителей (иреобразо.вателей) 5 и 6 давления. Вычислительное устройство содержит дроссельные сумматоры 7-//, иятимембранпые сумматоры 12 и 13, делительное устройство 14, расход сжатого воздуха через измерительные сопла которого устаН:авл|Ивается регулируемыми дросселями .15 и 16. Показания уровнемера индицируются 1вторич:ным прибором 17. Источником методической погрешности .известных пневматических уровнемеров жидких сред является то обстоятельство, что оцепка уровня осуо ествляется по гпдростатнческому давлению, которое Я вляется фупкцией как уровня контролируемой среды, так и ее плотности. Повышение точности может быть достигк то конструктивными мероприятияма-1, исключаюгцими влияния па показания прибора изменений плотности. Рассмотрим теоретические предносылки построения такого устройства. Предположим, что пьезометрический датчик, через который установлен устойчивый барабан сжатого воздуха, опушен в жпдкость плотноста р на глубину Л. Тогда давление сжатого воздуха jPi в этом датчике определяется соотношением P p-g-h(1) где р - плотность жндкости; g - ускорение свободного падения; h - глубина погружения датчика в жидкость. Если в эту жидкость на глубину /г + Л опустить второй пьезо.метрический датчик. то давление сжатого воздуха в нем определяется соотношением, аналогичным (1), т. е. (h + A.(2) Располагая (1) и (2), определим разность давлений в ньезометрических датчпкахP ()-g-A.(3) Если в качестве датчика уровня используется .первый пьезометрический датчик (опущенный на глубину h, тогда совместным решением соотношений (1) и (3) получим-&- Поскольку как изменение уровня h. так и изменение плотности Др могут варьироваться в различных пределах, то целесообразно пневматические сигналы P| и ДР, пропорциональные этим параметрам, подать на усилители (преобразователи), выходной сигнал каждого из которых соответствует 0,2-f-l кг/см (стандартному аналоговому пневматпческому выходпому сигналу- в системе ГСП). Кроме того, выходной пневматический сигнал прибора Р/, также должен изменяться от 0,2 до 1 кг/см. Анализ соотношения (4) показывает, что для его приборной реализации необходимо наличие двух пьезометрических датчиков (датчиков гидростатического давления), усилителей давления этих датчиков и вычислительного устройства. Для построения последнего соотношение (4) необходимо преобразовать к машвнно 1у виду. Если величина /г изменяется от /i шах ДО /г,,,,,:, PI - т Р,„,, до Р,„,„, ДР-от ЛР„ доДЛ,г,п, а этим параметрам соответствуют их пневматические эквиваленты Р,;, Р,, и f л/, каждый из которых, как указывалось выше, изменяется от 0,2 до 1 кг/см, то масштабные коэффициенты искомого машинного уравнения определяются соотношением где / - масштабный коэффициент /-го техиологического параметра; Дл:, - изменение г-го технологического параметра; Д/- max- максимальное изменение пневатического выходного сигнала, пропорииональное изменению г-го технологического параметра. Пспользуя соотношение (о), получим .iKix ,, Pln:a : mi-; - U,8 АР„„, - ЛР,,, С учетом того, что пневматические сигалы .решения и аргументов соотношения (4) ;изменяются в пределах 0,2 1 кг/см, олучаем для них следуюшие выражения: ,i:vp Q j-y , iliin, р р я -,,Ll: i ilUliL/p no , р(7) 1ПСV .I и,, ,1) ДР- Ршах--ДРтш,рп 91 1 D (v-и,2)+АР Подставив соотношения (7) в выражение (4) и выполнив преобразования, получим:Р/г:. где п.М,25(й,„,-Л.й:.): /n rf-е; n - ,25-hn,,2o ft,,,;,:;. d.A.b; fe l,25(P:,,a,-Pin,iu) .. A.., с-Л,25(АР,„,-ДР„,„); г, 1,25ЛР,„;„-0,2о ЛАж,,. Таким образом, вычислительное устройство описываемого пневматического уроанемера жпдких сред должно реализовать алгоритм, представлепный соотношением (8). Из изложенного следует, что пневматический выходной сигнал уровнемера является функцией только уровня технологического раствора. Это позволяет повыспть точность измерения в тех случаях, когда плоткость ;пзменяется ио технологическому регламенту вследствие изменеиля тгмперат ры или других факторов. Коэффициенты d. т, п, с и Ci в соотношении (8), как правило, меньше едннипы. Устройство работает следующим образом. Регулируемыми дросселями 3 { 4 устанавливается устойчивый барботаж сжатого воздуха из пьезометрических датчиков / и 2. На выходе усилителя 5:получается аналоговый пневматический выходной сигнал Р,.,, иропорциоиальиый гидростатическому давлению, измереииому датчиком /. На выходе силите.тя 6 пол чается аналоговый пневматический сигнал Р.;,, пропорциональный ллотпости контролируемой среды. С помоидью дроссельиого сумматора 7 устанавливают давление, соответствхчощее коэффициенту п. С иомощью дроссельных сумматоров (делителей давления) 8 и 9 получаются соответственно ппевматпческие сигналы и /пР л/,. Поскольку иневматнческие сипиалы, соответствуюшие коэффициенту п, и aPpi иоданы в положительиые камеры иятимембраниого с мматора 12. а пневматический сигнал т Рд.., иодан в его отр|Ицательи ю Kaviepy, то на выходе последнего получается алгебраическая cyMfvia иеречисления сигналов. Таким образом приборно реализован числитель соотношения (8). Реализация знаменателя соотношения (8) осуществляется аналогично. С иомошью дроссельного с мматора W получается аналоговый пневматический сигнал с Р ;,, давление Ci обесиечинаетея дроссельным с 1матором //. Алгебраическое сумми1ювание этих сигналов осуществляется пятимембранным сумматором /о. Поскольку выход пятимембраиного сумматора 12 соединен с положительпой камерой делительного устройства 1-1, а его сопло, охваченное отрицательной обратной связью, соединено с выходом пятимембрап.иого сумматора 13, то на выходе получается пиевматическш сигнал, пропорциопальпый частному выход ых сигналов соответственно нятимсмбранных сумматоров 12 и 13, т. с. величина Р/.. , которую и регистрирует вторичный прибоо Г/. Ф о Р м л а и 3 о б Р е т с н и я Пневматически уровнемер жидких сред, содержа11,пй дифференциальный барботажиый датчик, выиолнснный в двух трубок раЗЛИЧИОЙ , ОИуИ, В ()НТрОлир е.мую жидкость, соед1И еиных че)ез регулируемые дроссел с подачи сжатого воздуха и подкл 0ченпь х к входам усилителя, п вторичный прибор, ОТ,Т 1Ча Ощийся тем, что, с целью расширения д аиазона измерения, повышения точиости и надежности, уровнемер снабжен доиолиительным усилителем. дросеельиымп сумматорами. пят мембраинь М 1 сумматорами :и делительньпг стр011ством, причем выход короткой барботажной тр бки соединеи с входами основного i )лШ1тельиого усилителей, положительные камеры первого пятимембраииого cyMMaTojia соединены через дроссельные суммагоры с иодачи сжатого воздуха и выходол; дополнительного уснлителя. а из его отрицательных камер через дроссельный сумматор соедпнена е выходом основно:; усилителя, выход иервого ият 1мембраиного сумматора соединен с иолож 1тельиой камерой устройства, соило которого, охваченное отр1ицатель ой обратиой связью, соединено с выходом второго пятимем6painHoro сумматора, 1оложптелы1ые камеры которого соединены через дроссельные сумматоры соответствеиио с выходом основного усилителя п лпнией иодачи сжатого воздуха. Источник нформац и, при 1ятые во а имаиие при эксиертизе; 1.Авторское св детельетво СССР ЛЬ 469057, л. G 01 F 23Чо. 1973. 2.Авюрское свидетельство СССР X; 279088, кл. G 01 F 23И. 1969.

| название | год | авторы | номер документа |
|---|---|---|---|
| Пьезометрический уровнемер | 1991 |
|
SU1831658A3 |
| Пьезометрический уровнемер | 1980 |
|
SU898263A1 |
| Уровнемер | 1984 |
|
SU1223043A1 |
| Гидростатический уровнемер | 1979 |
|
SU800661A1 |
| Пьезометрический плотномер | 1980 |
|
SU918818A1 |
| Уровнемер | 1979 |
|
SU773441A1 |
| Уровнемер | 1984 |
|
SU1167438A1 |
| Пьезометрический уровнемер | 1990 |
|
SU1747922A1 |
| Пневматический уровнемер жидких сред | 1977 |
|
SU769345A1 |
| Уровнемер | 1988 |
|
SU1597577A2 |