(54) СПОСОБ ЗАПИСИ И ВОСПРОИЗВЕДЕНИЯ СИГНАЛОВ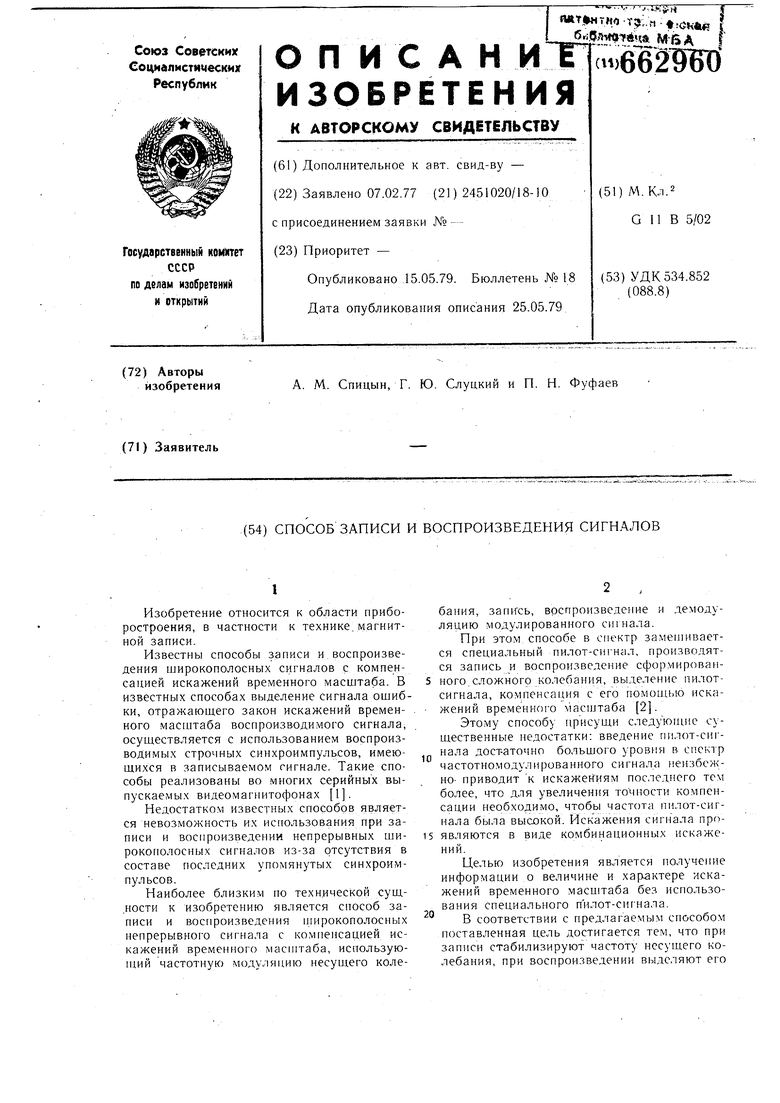
1
Изобретение относится к области приборостроения, в частности к технике магнитной записи.
Известны способы записи и,воспроизведения широкополосных сигналов с компенсацией искажений временного масштаба. В известных способах выделение сигнала ошибки, отража ош.его закон искажений временного масштаба воспроизводимого сигнала, осушествляется с использованием воспроизводимых строчных синхроимпульсов, имеющихся в записываемом сигнале. Такие способы реализованы во многих серийных выпускаемых видеомагнитофонах 1.
Недостатком известных способов является невозможность их использования при записи и воспроизведении непрерывных широкополосных сигналов из-за отсутствия в составе последних упомянутых синхроимпульсов.
Наиболее близким но технической суш,.ности к изобретению является способ записи и воспроизведения пшрокополосных непрерывного сигнала с компенсацией искажений временного масштаба, используюи.ий частотную модуляцию несущего колебания, 3anvfcb, воспроизведение и демодуляцию модулированного си1нал.а.
При этом способе в спектр замешивается специальный пилот-сигнал, производятся запись и воспроизведение сформировапного сложного колебания, вы.з,еление пилотсигнала, компенсация с его помощью искажений временного iacHJTa6a 2.
Этому способу присуши следуюпще существенные недостатки: введение пилот-си|-нала достаточно большого уровня в спектр частотномодулированного сигнала неизбежно- приводит к искажениям последнего тем более, что для увеличения точности компенсации необхо.димо, чтобы частота пилот-сигнала была высокой. Искажения сигнала проявляются в виде комбинационных искажений.
Целью изобретения является получение информации о величине и характере искажений временного масн1таба без использования специального пилот-сигнала.
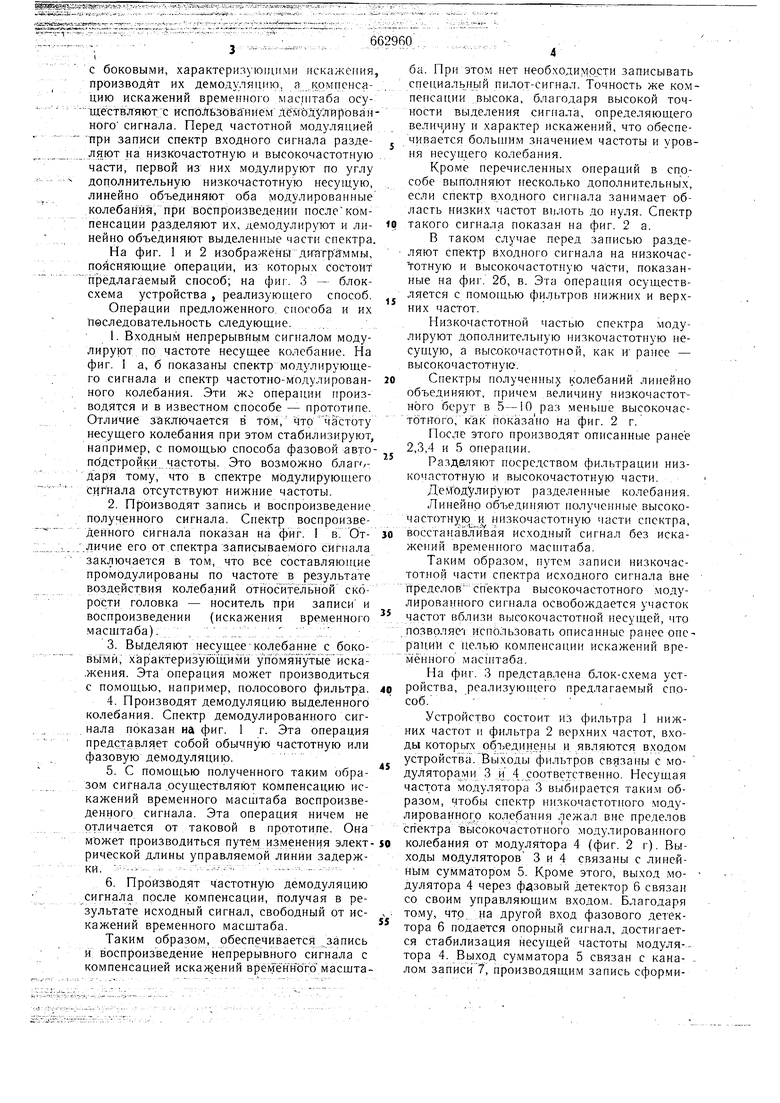
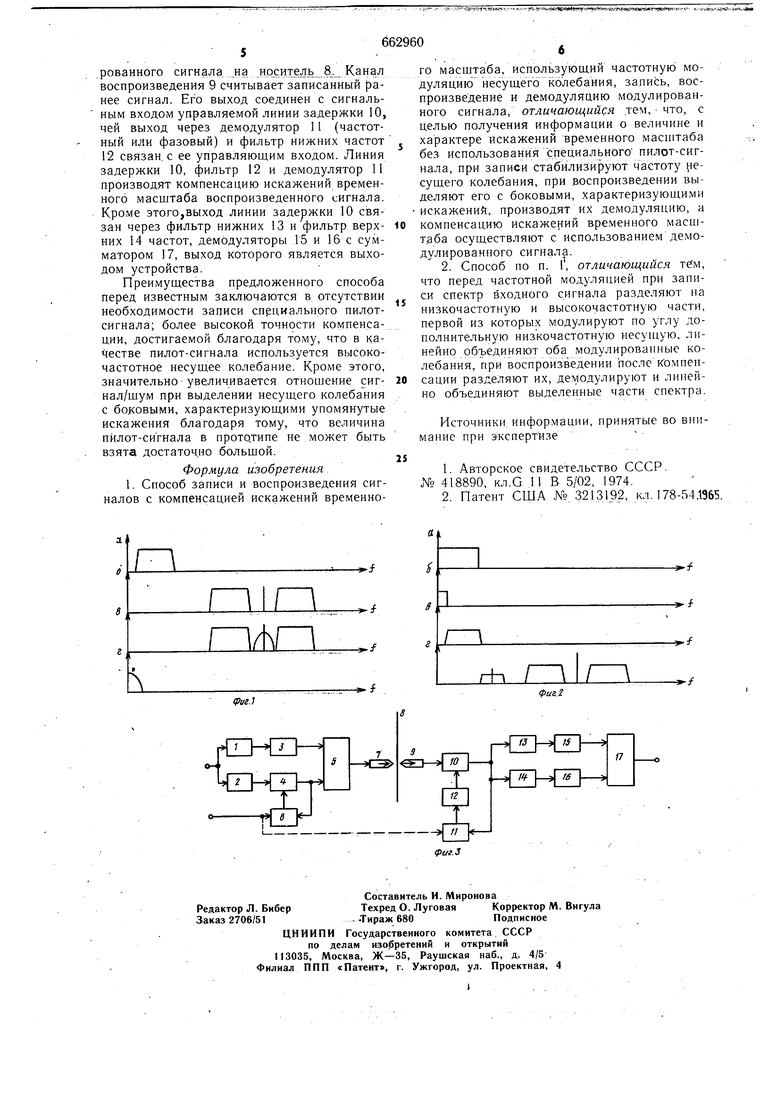
В соответствии с предлагаемым способом поставленная цель достигается тем, что при записи стабилизируют частоту несущего колебания, при воспроизведении выделяют его с боковыми, характеризующими искажения, производят их демодуляцию, а компсисацию искажений времеиншо мас/итаба щестВляют с испбЛьзованИем дёШдулйрованноге сигнала. Перед частотной модуляцией при записи спектр входного сигнала разделяют на низкочастотную и высокочастотную части, первой из них модулируют по углу дополнительную низкочастотную несущую, линейно объединяют оба модулированные колебания, при воспроизведении послекомпенсации разделяют их, демодулируют и линейно объединяют выделенные части спектра. На фиг. 1 и 2 изобралчёны ДИ атра ммы, поясняющие операции, из которых состоит предлагаемый способ; на фиг. 3 - блоксхема устройства , реализующего способ. Операции предложенного, способа и их Песледовательность следующие. 1.Входным непрерывным сигналом модулируют по частоте несущее колебание. На фиг. 1 а, б показаны спектр модулирующего сигнала и спектр частотно-модулированного колебания. Эти же операции производятся и в известном способе - прототипе. ОтлИЧйб заклЕОчается в тОм, что частоту несущего колебания при этом стабилизируют, например, с помощью способа фазовой автоподстройки частоты,. Это возможно благо Даря тому, что в спектре модулирующего сигнала отсутствуют нижние частоты. 2.Производят запись и воспроизведение полученного сигнала. Спектр воспроизведенного сигнала показан на фиг. I в. 0т;личие его от спектра записываемого сигнала заключается в том, что все составляющие промодулированы по частоте в результате воздействия колебаний относМельной скорости головка - носитель при записи и воспроизведении (искажения временного масштаба). . ; ;;,;;..; ; ,. , . .... 3.Выделяют несущееКолебание с боковЫмй, характеризующими упомянутьгеиска,жения. Эта операция может производиться с помощью, например, полосового фильтра. 4.Производят демодуляцию выделенного колебания. Спектр демодулированного сигнала показан на фиг. 1 г. Эта операция представляет собой обычную частотную или фазовую демодуляцию. 5.С помощью полученного таким образом сигнала осуществляют компенсацию искажений временного масщтаба воспроизведенного сигнала. Эта операция ничем не отличается от таковой в прототипе. Она может производиться путем изменения электрической длины управляемой линии задержКИ. .- . -. ;.: .:;. -. : .,. . 6.Пройзводят частотную демодуляцию сигнала после компенсации, получая в результате исходный сигнал, свободный от искажений временного масщтаба. Таким образом, обеспечивается запись и воспроизведение непрерывного сигнала с компенсацией искажений врёмённоТо масщтаба. При этом нет необходимр сти записывать специальньт пилот-сигнал. Точность же ко.мпенсации .высока, благодаря высокой точности выделения сигнала, определяющего велич ину и характер искажений, что обеспечивается большим значением частоты и уровня несущего колебания. Кроме перечисленных операций в способе выполняют несколько дополнительных, если спектр входного сигр1ала занимает область низких частот вплоть до нуля. Спектр такого сигнала показан на фиг. 2 а. В таком случае перед записью разделяют спектр входного сигнала на низкочастотную и высокочастотную части, показанные на фиг. 26, в. Эта операция осуществляется с фильтров нижних и верхних частот. Низкочастотной частью спектра модулируют дополнительную низкочастотную несущую, а высокочастотной, как и ранее - высокочастотную.,.. Спектры полученных колебаний линейно объединяют, приче.м величину низкочастотного берут в 5-10 раз меньше высокочастотного, как показано на фиг. 2 г. После этого производят описанные ранее 2,3,4 и 5 операции. Разделяют посредством фильтрации низкочастотную и высокочастотную части. Де;МЪдулируют разделенные колебания. Линейно объедиг1яют полученные высокочастотную и низкочастотную части спектра, восстанавлйвая исходный сигнал без искажений временного масштаба. Таким образом, путем записи низкочастотной части спектра исходного сигнала вне пределов спектра высокочастотного модулированного сигнала освобождается участок частот вблизи высокочастотной несущей, что позврляеч использовать описанные ранее операции с целью компенсации искажений вреjvieHHoro масштаба. На фиг. 3 представлена блок-схема устройства, реализующего предлагаемый способ. Устройство состоит из фильтра I нижних частот и фильтра 2 верхних частот, входы которых объединены и .являются входом устройств.Выходы фильтров связаны с модуляторами 3 и 4 соответственно. Несущая частота модулятора 3 выбирается таким образом, чтобы спектр низкочастотного модулированного колебания лежал вне пределов спектра высокочастотного модулированного колебания от модулятора 4 (фиг. 2 г). Выходы модуляторов 3 и 4 связаны с линейным сумматором 5. Кроме этого, выход модулятора 4 через фазовый детектор 6 связан со своим управляющим входом. Благодаря тому, что на другой вход фазового детектора 6 подается опорный сигнал, достигается стабилизация несущей частоты модуля-.тора 4. Выход сумматора 5 связан с каналом записи 7, производящим запись сформи
