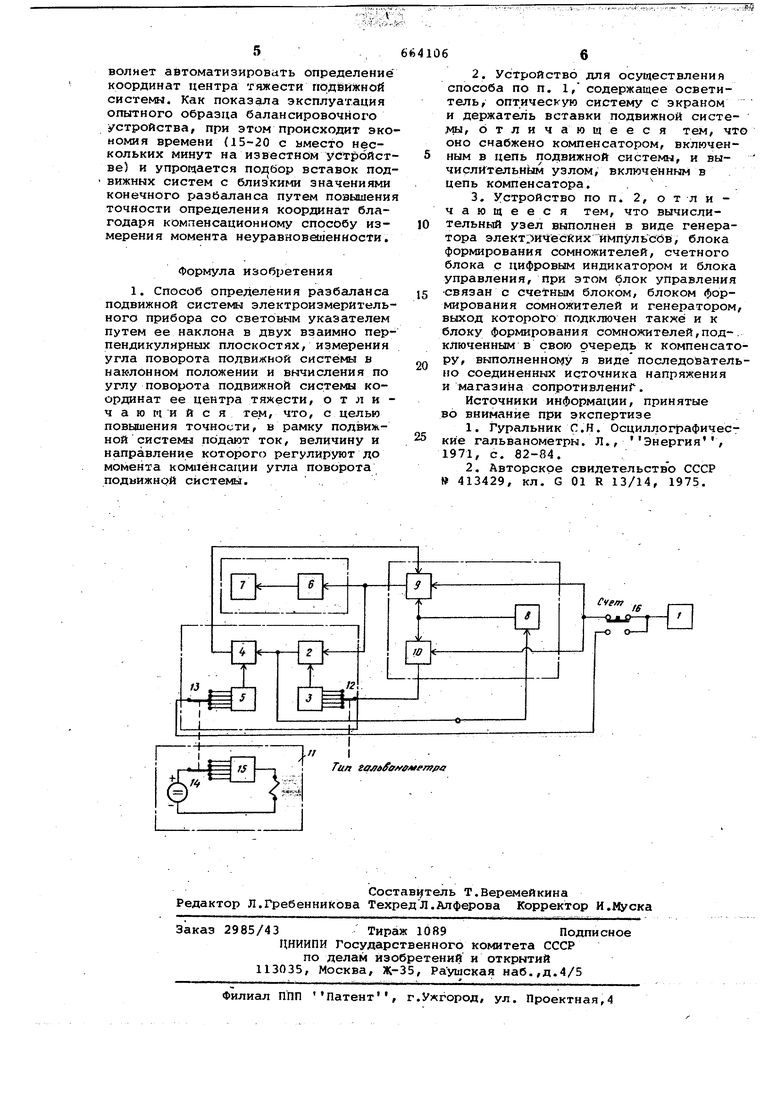
(54) СПОСОБ ОПРЕДЕЛЕНИЯ РАЗБАЛАНСА ПОДВИЖНОЙ СИСТЕМЫ ЭЛЕКТРОИЗМЕРИТЕЛЬНОГО ПРИБОРА СО СВЕТОВЫМ УКАЗАТЕЛЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ Вычислительный узел может быть выполнен в виде генератора электричес ких импульсов, блока формирования сомножителей, счетного блока с цифровым индикатором и блока управления, при этом блок управления связан с счетным блоком, блоком формирования сомножителей и генератором, выход которого подключен также и к блоку фор мирования сомножителей, подключенным в свою очередь к компенсатору, выполненному в виде последовательно соединенных источника напряжения и магазина сопротивлений. . На чертеже дана схема устройства., реализующего предлагаемый способ,Устройство содержит осветитель, оп тическую систему с экраном, держатель вставки подвижной системы (на чертеж.е не показаны), генератор 1, блок формирования сомножителей, включающий формирователь пачки импульсов (ФПИ)-счетчик 2 на 1000 импульсов и шифратор 3, формирователь числ§ пачек (ФЧП)-счетчик 4 на 1000 импульсо и шифратор 5, счетный блок из последовательно соединенных счетчика б на 1000000 импульсов и цифрового индика тора 7, блок управления, сбстоявдяй из одновибратора 8 и схем 9 и 10 сов падения. , . , .; Величина разбаланса выралае ся в виде прямоугольных координат X,Y центра тяжести подвижной системы, зн чения которых и индексы X или Y (в зависимости от направления наклоHd прибора) высвечиваются на табло цифрового.индикатора 7. При наклонном положении прибора из-за разбалан са подвижной системы относительно ос ее вращения существ ёт момент неурав нове1аенн6сти. Под действием Момента неуравновешенности подвижная система оказ:ывается повёрнутой на некоторый , угол. Для: компенсации этого моментй в рамку гальванометра от компенсатора 1° подается Ток величины, чтобы подвижная система возвратилась в исходное положение. При этом Между током и соответствующей координатой центра тяясести; существует зависимост ш т Х,У Р sin |Ъ гДе потокосцепление рамки; Р- вес подвижной системы; j5- угол наклона прибора; i- ток, проходящий через рамку. Эта зависимость реализуется в вычислительном узле. От генератора 1 в счетный блок периодически поступают пачки импульсов, количество импульсов в пачке равно отнсияению число таких пачек равно -у- г- I. Суммарное количество импульсов равно значению координаты. От генератора Д на схемы 9 и 10 совпадения одновременно поступают мпульсы. Схемы совпадения пропускают импульсы поочередно в зависимости от состояния одновибратора 8. При отсутствии на входе одновибратора сигнала схема 9 совпадения открыта, а схема 10 закрыта. Импульсы, кото-рые проходят через схему 9 совпадения, поступают одновременно на вход счетного блока и на вход счетчика 2. Как только счетчик 2 запо; нится, на его выходе появится импульс, который подается на вход одновибратора 8. Одновибратор опрокидывается и запирает схему 9 совпадения. Число импульсов, которое прошло через схему 9 совпадения и поступило в счетный блок, зависит от тбго, какое число было предварительно записано в счетчике 2. Чтобы число импульсов в пачке необходиравнялось сомножителю МО в счетчике 2 записать предварительно дополнительное число 1000 - Число записывается после вьщачи счетчиком 2 выходного импульса на одновибратор 8. Одновибратор отпирает схему 10 совпадения, и импульсы от генератора 1 через соответствующие входные шины шифратора 3, определяегФ1е положением переключателя 12, устанавливают счетчик 2 в состояние, соответствующее дополнительному числу 1000 - -р . После возвращения од- ,; новибратора 8 в пёрвонг чальное состояние цикл повторяется. Число пачек импульсов определяется счетчиком 4. В счетчике 4 перед ;началом- q4eTa записано дополнительное число I, которое записывается 1000 прдагей импульсов от генератора 1 на соответствующие входные шины шифратора 5. Переключатель 13 входных шин глеханически связан с переключателем 14 магазина сопротивлений 15, и при компенсации момента неуравновешенности для заданного угла наклона прибора автоматически подключаются те входные шины, которые обеспечивают запись требуемого дополнительного числа. После прохождения каждой пачкиимпульсов на вход счетчика 4 от счетчика 2 поступает импульс. Как только число импульсов, поступивших на счетчик 4, окажется равным „v:; д 1,счетчик запрет схему 9 совпадения и прекратится подача импульсов на счетный блок. Табло цифрового индикатора 7зафиксирует значение координаты центра тяжести подвижной системы. 8результате дпя получения значения разбаланса достаточно установить в цепи рамки подвижной системы ток кокленсации и нажать кнопку 1Ь счет . Использование дополнительных узловвычислительного и компенсатора - позволнет автоматизировать определение координат центра Т5гжестй подвижной системы. Как показала эксплуатация опытного образца балансировочного устройства, при этом происходит эко номия времени (15-20 с вместо нескольких минут на известном устройст ве) и упрощается подбор вставок под вижных систем с близкими значениями конечного разбаланса путем повышени точности определения координат благодаря компенсационному способу измерения момента неуравнове1яенности. Формула изобретения 1. Способ определения разбаланса подвижной системы электроизмерительного прибора со световым указателем путем ее наклона в двух взаимно перпендикулярных плоскостях, измерения угла поворота подвижной системы в наКЛОнном положении и вычисления по углу поворота подвижной системы координат ее центра тяжести, отличаю PI и йен тем, что, с целью повышения точности, в рамку подвижной системы подают ток, величину и направление которого регулируют до момента компенсации угла поворота подвижной системы, . 6 2,Устройство для осуществления способа по п. 1, содержащее осветитель, оптическую систему с экраном и держатель вставки подвижной систе 1Ы, отличающееся тем, что оно снабжено компенсатором, включенным в цепь подвижной систе ы, и вычислительным узлом, включенным в цепь компенсатора. . 3.Устройство по п. 2, отличающееся тем, что вычислительный узел выполнен в виде генератора элект1эи еских Импульсбй, блока формирования сомножителей, счетного блока с цифровым индикатором и блока управления. При этом блок управления связан с счетным блоком, блоком формирования сомножителей и генератором, выход которого подключен также и к блоку формирования сомножителей,под-. ключенным в свою очередь к компенсатору, выполненному в виде последовательно соединенных источника напряжения и магазина сопротивлений. Источники информации, принятые во внимание при экспертизе 1.Гуральник С.Н. Осциллографические гальванометры. Л.,Энергия, 1971, с. 82-84. 2.Авторское свидетельствЪ СССР 413429, кл. G 01 R 13/14, 1975.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для формирования пачек импульсов | 1985 |
|
SU1324090A1 |
| Генератор псевдослучайной М-последовательности | 1985 |
|
SU1264317A2 |
| Устройство для определения экстремальных значений функции | 1990 |
|
SU1716503A1 |
| БЛОК НАБОРА КОДА ЭЛЕКТРОННО-КОДОВОГО ЗАМКА | 1991 |
|
RU2021454C1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ПАЧЕК ИМПУЛЬСОВ | 1995 |
|
RU2098918C1 |
| СПОСОБ РАДИОНАВИГАЦИОННЫХ ИЗМЕРЕНИЙ В ИМПУЛЬСНО-ФАЗОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЕ | 1997 |
|
RU2115937C1 |
| Устройство для формирования пачек импульсов | 1980 |
|
SU1001448A1 |
| ЦИФРОВОЙ СПОСОБ ИЗМЕРЕНИЯ ТЕМПЕРАТУРЫ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2344384C1 |
| Устройство для считывания графической информации | 1990 |
|
SU1728872A1 |
| Цифровой измеритель частоты заполнения радиоимпульсов | 1982 |
|
SU1161892A1 |
Cvem
IB
