Изобретение относится к области измерения угловых величин оптикоэлектронными методами. Известен способ измерения угловы перемещений 1, заключ щийся в том, что получают непрерывно вращаю щиеся плоскости поляризации источни ка с помощью зеемановского расщепления частоты лазера. Недостатками этого способа являются сложность реёшизации, обусловленная необходимостью применения двухчастотного лазера, мгшая точнос измерений и,нестабильность результа та измерения. Известен способ измерения разнос ти углов поворбта двух валов 2, заключающийся в том, что осуществля ют поворот ПЛОСКОСТИ линейной поляриз щии излучения источника поляризованного света с помощью двух управляющих напряжений, одно из которых изменяется по синусоидал;ьнс 1у закону, разделяют пространственно . излучение на два излучения и направ ляют их на анализаторы, которые сое диняют с контролируемыми валги ш, осуществляют анализ этих излучений преобразуют световую картину после анализаторов в электрические сигнал регистрируют фазовые сдвиги между ними по временному положению характерных точек электрических сигналов и по величине этих фазовых сдвигов судят о разности углов.поворота валов . Недостатками этого способа являются низкая точность и стабильность измерений, вследствие необходимости высокоточной стабилизации амплитуд и 90-градусного сдвига по фазе между управляющими напряжениями, а также зависимости результата регистрации фазовых сдвигов от изменения интенсивности источника излучения и других дестабилизирующих факторов; сложность реализации из-за необходимости введения дополнительного оптического модулятора, управляемого косинусоидальным напряжением. Цель изобретения - повышение точности измерения, стабильности показаний и упрощение реализации. Это достигается тем, что в качестве второго управляющего напряжения используют напряжение, изменяющееся по линейному пилообразному закону с фиксированной крутизной и амплитудой развертки, обеспечивающей поворот плоскости поляризации на угол
не меньший 180, а в качестве характерных точек электрических сигналов используют точки, соответствующие точкам минимумов экстремальных характеристик пропускания анализаторов.
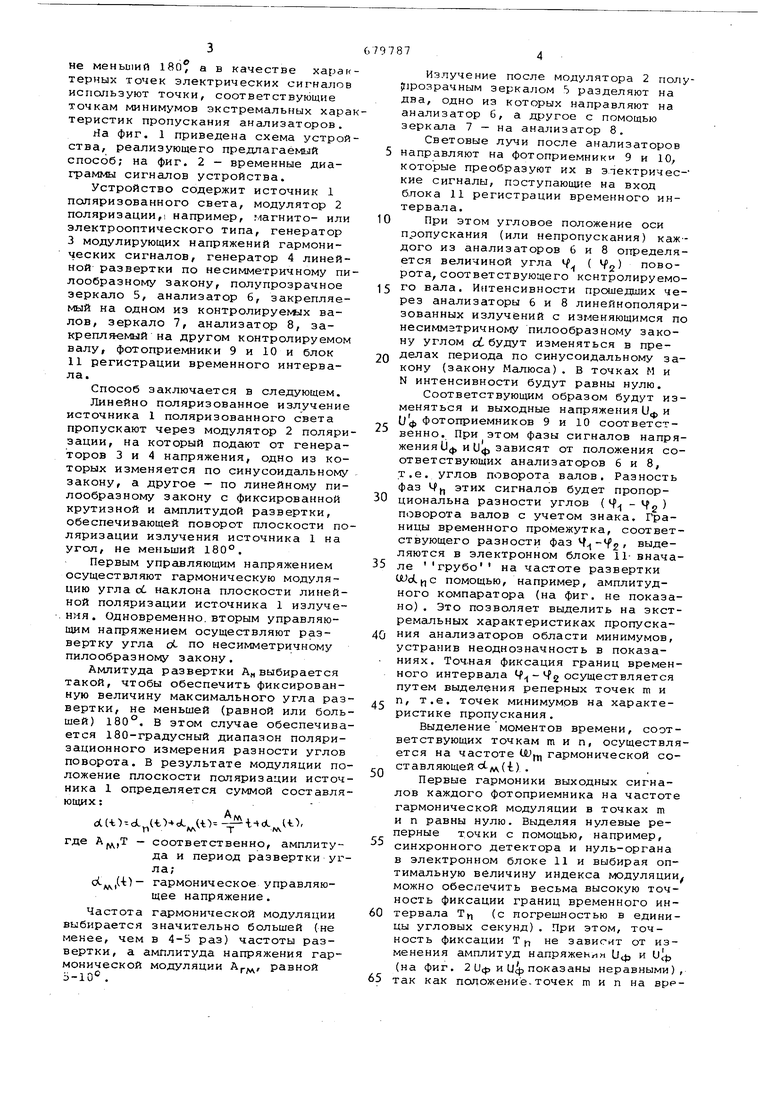
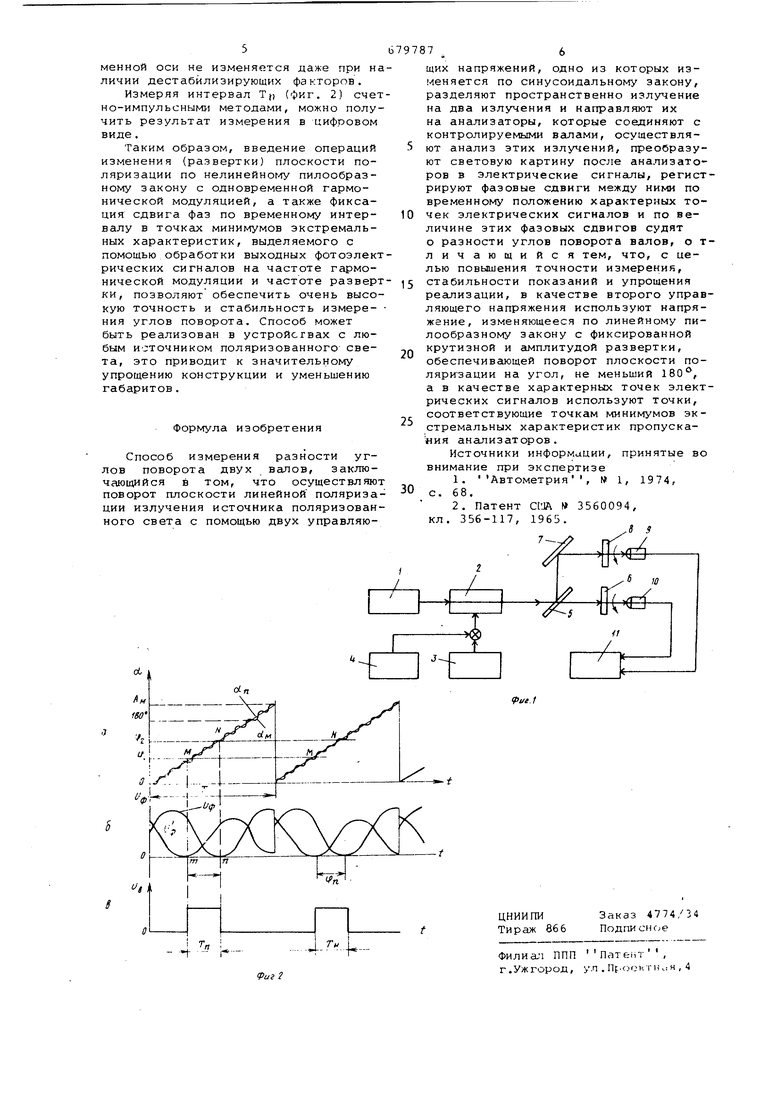
На фиг. 1 приведена схема устройства, реализующего предлагаемый способ; на фиг. 2 - временные диаграмг ы сигналов устройства.
Устройство содержит источник 1 поляризованного света, модулятор 2 поляризации, например, магнито- или электрооптического типа, генератор 3 модулирующих напряжений гармонических сигналов, генератор 4 линейной развертки по несимметричному пилообразному закону, полупрозрачное зеркало 5, анализатор 6, закрепляемый на одном из контролируемых валов, зеркало 7, анализатор 8, закрепляемый на другом контролируемом валу, фотоприемники 9 и 10 и блок 11 регистрации временного интервала.
Способ заключается в следующем. Линейно поляризованное излучение источника 1 поляризованного света пропускают через модулятор 2 поляризации, на который подают от генераторов 3 и 4 напряжения, одно из которых изменяется по синусоидальному закону, а другое - по линейному пилообразному закону с фиксированной крутизной и амплитудой развертки, обеспечивающей поворот плоскости поляризации излучения источника 1 на угол, не меньший 180°.
Первым управляющим напряжением осуществляют гармоническую модуляцию угла об наклона плоскости линейной поляризации источника 1 излуче. . Одновременно, вторым управляющим напряжением осуществляют развертку угла сХ- по несимметричному пилообразному закону.
Амлитуда развертки А„выбирается такой, чтобы обеспечить фиксированную величину максимального угла развертки, не меньшей (равной или большей) 180°. В этом случае обеспечивается 180-градусный диапазон поляризационного измерения разности углов поворота. В результате модуляции положение плоскости поляризации источника 1 определяется суммой составляющих :
ct(-k
где Aj,T - соответственно, амплитуда и период развертки угла, оС..,(-t)- гармоническое управляюЛЛ.
щее напряжение.
Частота гармонической модуляции выбирается значительно большей (не менее, чем в 4-5 раз) частоты развертки, а амплитуда напряжения гармонической модуляции АГ/S, равной 5-10.
Излучение после модулятора 2 полу 1розрачным зеркалом S разделяют на два, одно из которых направляют на анализатор 6, а другое с помощью зеркала 7 - на анализатор 8.
Световые лучи после анализаторов направляют на фотоприемники 9 и 10, которые преобразуют их в электрические сигналы, поступающие на вход блока 11 регистрации временного интервала.
При этом угловое положение оси пропускания (или непропускания) каждого из анализаторов 6 и 8 определяется величиной угла . ( Vg) поворота, соответствующего контролируемого вала. Интенсивности прошедших через анализаторы 6 и 8 линейнополяризованных излучений с изменяющимся по несимметричному пилообразному закону углом об будут изменяться в пределах периода по синусоидальному закону (закону Малюса). В точках М и N интенсивности будут равны нулю.
Соответствующим образом будут изменяться и выходные напряжения Уф и иф фотоприемников 9 и 10 соответственно. При этом фазы сигналов напряжения Оф и Цф зависят от положения соответствующих анализаторов 6 и 8, т.е. углов поворота валов. Разность фаз , этих сигналов будет пропорциональна разности углов ( Ч 2 поворота валов с учетом знака. Границы временного промежутка, соответствующего разности фаз выделяются в электронном блоке 11- вначале грубо на частоте развертки ODoLnC помощью, например, амплитудного компаратора (на фиг. не показано) . Это позволяет выделить на экстремальных характеристиках пропускания анализаторов области минимумов, устранив неоднозначность в показаниях. Точ.ная фиксация границ временного интервала Ч - Чг осуществляется путем выделения реперных точек m и п. Т.е. точек минимумов на характеристике пропускания.
Выделениемоментов времени, соответствующих точкам тип, осуществляется на частоте 40 гармонической составляющей () .
Первые гармоники выходных сигналов каждого фотоприемника на частоте гармонической модуляции в точках m и п равны нулю. Выделяя нулевые реперные точки с помощью, например, синхронного детектора и нуль-органа в электронном блоке 11 и выбирая оптимальную величину индекса модуляции можно обеспечить весьма высокую точность фиксации границ временного интервала Tf, (с погрешностью в единицы угловых секунд). При этом, точность фиксации Т л не завис т от изменения амплитуд напряжении Оф и Уф (на фиг. 2 Uct и Цф показаны неравными) так как папожение-точек m и п на врр