Изобретение относится к области ускорительной техники, в частности к устройствам определения траекторий заряженных частиц в магнитном поле ускорителей и каналов транспортировк пучков. Известны устройства для определения траекторий заряженных частиц в магнитном поле, содержащие датчики магнитного поля, с которого сигнал поступает в последняя, решая уравнения движения по измеренной топографии поля, определяет расчетную траекторию заряженных частиц iljНедостатком подобных устройств является то, что геометрические разм ры датчика не позволяют достигнуть. высокой точности измерения, особенно в магнитных полях с большим градиентом Кроме того, существование в датчиках планарного эффекта, температурной зависимости, нестабильности выходных параметров, а также неинтегральность измерений датчика поля увеличивают погрешность определения расчетной траектории заряженных частиц. Наиболее близким техническим реше нием является устройство для автоматического определения траекторий зар женных частиц в магнитном поле, содержащее гибкую токопроводящую нить, один конец которой закреплен на подвижной опоре, а второй - перекинут через блок и на нем укреплен груз, регулируем й источник постоянного тока, подключенный к нити, систему коорданатно-еледящих механизмов положения нити и управлягацую ЭВМ Г- Это устройство позволяет моделировать и непосредственно определять возможные траектории заряженных частиц в неоднородных магнитных полях с достаточно высоким разрешением по импульсам частиц, ограничиваемым практически только погрешностями трения в оси блока и гибкостью нити. Недостатком известного устройства является ограниченность диапазона , определения траекторий, а именно: в случае определения трасс в поворотах или спектрометрических магнитах диапазон определения, ограничен в пределах углов поворота частиц от О до Л радиан, а в случае определения трасс в магнитных линзах ограничено измерениями до фокусных расстояний линз. Это обусловливается тем, что при превышении указанных углов и расстояний нарушается устойчивое равновесное положение нити
В пространстве при постояннсэм значении ее натяжения, обеспечиваемом силой тяжести оттягивающего груза.
Целью изобретения является расширение диапазона измерений.
Поставленная цель достигается тем что в известное устройство введены двухобмоточный соленоид, управляемые источники постоянного и переменного ТОКО9, дискриминатор экстремальных значений тока и координатная система положения груза в соленоиде так, что выход управляемого источника постоянного тока подключен к первой обмотке соленоида, а вторая обмотка соединена с первым выходом источника переменного тока, второй выход которого соединен с источником питания нити и со входом дискриминатора, выход которого и выход координатной системы положения груза, а также входы источников подключены к ЭВМ, причем груз выполнен из ферромагнитного материала и расположен внутри соленоида.
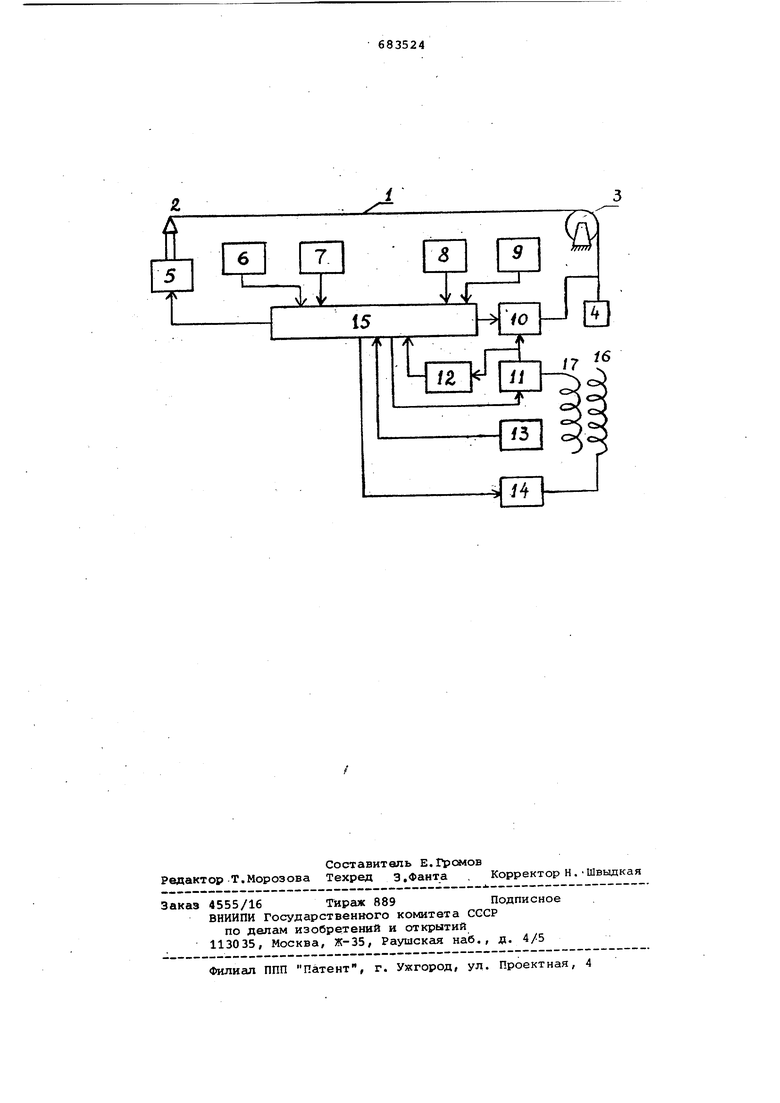
, На чертеже дана принципиальная схма устройства.
Устройство содержит гибкую токопроводяющую нить 1, подвижную опору 2, блок 3, ферромагнитный груз 4, механизм 5 перемещения подвижной опоры, кOOPдИНТано-еледящие механизмы б, 7, 8, 9 положения нити, регулируемый источник 10 постоянного тока нити, управляемый источник 11 переменного тока, дискриминатор 12 экстремальных значений тока нити, координатная система13 положения груза, управляемый источник 14 постоянного тока соленоида, управлякиая ЭВМ 15, первая обмотка 16 соленоида, вторая обмотка 17 соленоида.
Предложенное устройство работает следующим образом
Конец нити 1, закрепленный на опоре 2, перемещается посредством механизма 5 в области задаваемой ЭВМ 15, Исследуемое магнитное поле располагается между координатно-следящими мзханизмами 7 И 8. Нить запирается модулированным током, постоянна составляющая которой обеспечивается источником 10, S переменная - источНИКОМ 11. При этом подбор амплитуды и частоты переменной составляющей тока осуществляется в зависимости соотвественно от скорости перемещения опоры 2 и инерционности устройства и практически составляет: з.начение амплитуды - единицы процентов от значения постоянной составляющей тока нити, а частоты- несколько герц. Синхронно с током в нити создается модулированное магнитное поле в соленоиде, обеспечиваемое обмотками 16 и 17 и источниками Токов 11 и 14. В моменты времени, задаваемые дискриминатором 12 и заданным шагом перемещения опоры 2, осуществляется съем
и регистрация при помощи ЭВМ координат нити, измеряемых механизмгьми 6,7 ,8 и 9, а такзке значений текущих параметров всех узлов устройства. Дискриминатор 12 задает моменты вре, мени, соответствующие моментам прохождения переменной составляющей тока в нити через экстремальные и , нулевые значения. При этом, если из- . менения коорданты нити в моменты, соответствующие экстремальшлм значениям тока, окажутся несимметричными относительно координаты при нулевом значении тока, то управляющая ЭВМ установит такие значения координаты опоры 2 и токов в нити и соленоиде с
5 учетом положения груза в сопеноиде с помощью системы 13, которые обеспечат симметричное изменение значений этих координат, тем самым обеспечивая устой-яивое равновесное по0 ложение нити в пространстве, и одновременно приведут в соответствие отнсааение натяжения нити к току в нити с заданным значением импульса частиц, для которого проводятся из5 мерения.
Формула изобретения Устройство для автоматического
определения трасс заряженных частиц в магнитном поле, содержащее гибкую токопроводящую нить, один конец которой закреплен на подвижной опоре, а второй с грузом перекинут через
5 блок, регулируемый источник питания нити, систему координатно-следящих механизмов положения нити и управляющую ЭВМ, отличающееся тем, что, с целью расширения диапа0 зона измерений, в него введены двухобмоточный соленоид, управляекые источники постоянного и переменного токов, дискриминатор экстремальных значений тока и координатная система
г положения груза так, что выход управляемого источника постоянного тока подключен к первой обмотке соленоида, а вторая обмотка соединена с первым выходом источника переменного тока, второй выход которого соединен с источником питания нити и с входом дискриминатора, выход которого и выход координатной системы положения груза, а также входы всех источником питания соединен с ЭВМ, причем груз выполнен
5 из ферромагнитного материала и расположен внутри соленоида.
Источники информации, принятые во внимание при экспертизе
1.Киселев D.T. и др. Препринт, ИТЭФ-13, 1974.
2,Козадаев ,М.С., Тяпкин А.А. ПТЭ, 1956, № 1, с. 28.