(54) ЭЛЕКТЮдаШАМИЧЕСКИЙ ПРИВОД

| название | год | авторы | номер документа |
|---|---|---|---|
| ЛИНЕЙНЫЙ ИНДУКЦИОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ УДАРНОГО ДЕЙСТВИЯ | 1994 |
|
RU2091971C1 |
| Регулируемый электродинамический виброизолятор | 1985 |
|
SU1357625A1 |
| ЭЛЕКТРОДИНАМИЧЕСКИЙ ПРИВОД ПОДАЧИ ИНСТРУМЕНТА | 2004 |
|
RU2274525C1 |
| АВТОМАТИЧЕСКИЙ ВОЗДУШНЫЙ ВЫКЛЮЧАТЕЛЬ | 2007 |
|
RU2344507C1 |
| БЫСТРОДЕЙСТВУЮЩИЙ ИМПУЛЬСНЫЙ ГАЗОВЫЙ КЛАПАН | 2024 |
|
RU2835284C1 |
| ЭЛЕКТРОСЕЙСМОИСТОЧНИК | 2013 |
|
RU2540935C1 |
| БЫСТРОДЕЙСТВУЮЩИЙ ИМПУЛЬСНЫЙ ИНДУКЦИОННО- | 1970 |
|
SU263711A1 |
| УСТРОЙСТВО ДЛЯ ВОЗБУЖДЕНИЯ УПРУГИХ ВОЛН В СКВАЖИНАХ | 2007 |
|
RU2362188C2 |
| СПОСОБ ВОЗБУЖДЕНИЯ СЕЙСМИЧЕСКИХ ВОЛН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2302016C1 |
| ЭЛЕКТРОДИНАМИЧЕСКИЙ ВИБРАТОР | 1966 |
|
SU183978A1 |
1
Изобрегешю относится к сильноточной технике, в частности к приводу дугогасительных аппаратов.
Известны эпектроданамические приводы, применяемые в коммутационных аппаратах и работающие на отталкивании и притяжении магнитных полей, создаваемых как управляющим, aBTOHONQfUM, так и номинальным током, или током короткого замыкания (1. Эти приводы обеспечивают разведение контактов в быстродействующих короткозамьпсателях и т.д. Электродинамические приводы состоят из неподвижной силовой части, содержащей, по крайней мере, ощ1у катушку или виток, и подвижной силовой части, состоящей также из катушки или витка или металлического диска (после ими аналогичен с наведенным током). Ориентация магнитного поля катушек, зависящая от направления намотки соленоида - правосюрон1ЮГО или левостороннего - и от направления запитки обмотки током, в известной конструкщш создается и поляризуется только направлеинем проходящего через соленоид тока. Неподвижная часть привода механически закреплена
на О1юрной конструкюш аппарата, а подвижная часть соединена с перемещающимся узлом аппарата, например, контактным клапаном и т.д.
Недостатками подобных конструкций является недостаточное рабочее перемещение катущки привода из-за незначительных расстояний электромагнитных взаимодействий пар катушек, а также значительные их габариты. Кроме этого, трехкатушечные привода имеют (вследствие изменения расстояния электромапаптшх взаимодействий пар) переменную тяговую характеристику.
Наиболее близ1а1м по технической сущности является электродинамический привод, содержащий каркас, внутри которого закреплеиы дае неподвижные электрические катущки, межцу которыми размещена подвижная электричес. кая катушка, имеющая механическую связь с органом, например, клапаном 2.
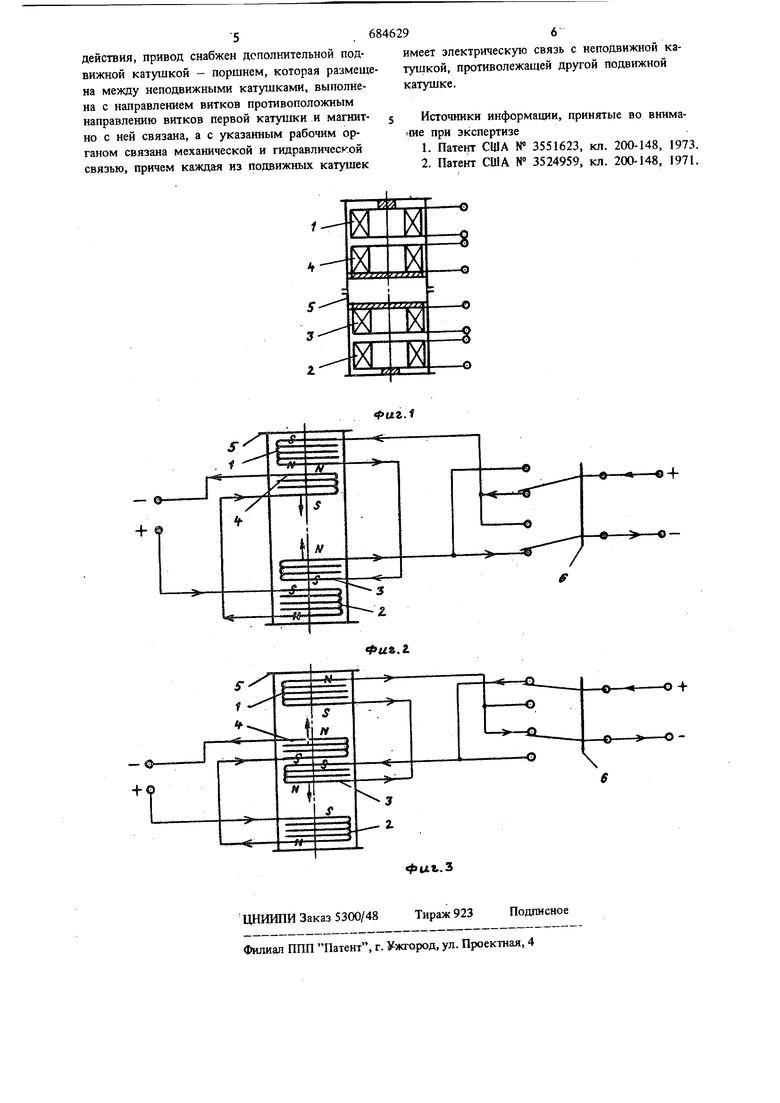
Расчетом и корректирующим подбором числа витков катушек можно получить относительно плавную зависимость силы от перемещения. Величина перемещения порпшей соизмерима с их средним радиусом (). Для двухкатушечного привода длина перемещения составляет Вдр , для трехкатушечного привода V 2Ял. Недостатком известного устройства является то, что при ограниченных диаметрах катушек трехкатушечный привод не может обеспечить большое перемещение рабочего органа. Цель изобретения - увеличение рабочего хо|Да быстродействующего привода и спрямление его тяговой характеристики. Поставленная цель достигается тем, что элект родинамический привод снабжен дополнительной подвижной катушкой - поршнем, которая раз1«ещена между неподвижным и катушками, выполнена с направлением витков ПРОТИВОПОЛОЖНЫМ направлению витков первой катушки и магнитно с ней связана, а с указанньш рабочим органом связана механической и гидравлической связью, причем каждая из подвижных катушек имеет электрическую связь с неподв ш ной катушкой, противолежащей другой подв1скной катушке. На фиг. 1 дано схематическое изображение предложенного электродинамического привода в исходном положении; на фиг. 2 показан один из возможных вариантов соединения кагу шек предложенного электродинамического привода; на фиг. 3 показано положение катушек поршней в начальный момент возврата в исход ное положение. Электрощшамический привод (фиг. 1) состоит из двух неподвижных катушек 1 и 2, двух подвижных катушек - поршней 3 и 4 и каркаса с соплами 5. Катушка - поршень (3 и 4) представляет с бой стакан из электропроводящего материала (например, алюм1гаия или меда), в стейках ко торого прорезана спиральная сквозная канавка, которая как бы разделяет витки катушки. Между витками щ)оложены секторы из изоляционного материала. Витки схшмаются гайкой стержнем, который устаиовлен внутри катушки и связан с днищем стакаиа. Токоподвод осуществляется к концам спирали катушки любым известным способом. Днище стакана представляет собой поршень с одной или несколькими поршневыми канавками и кольцами Совмещение в одной конструкции поршня и катушки позволяет в электродинамическом при воде получить между подвижными катушками поршнями минимальные расстояния магнитных взаимодействий и максимальный рабочий ход. Силовое взаимодействие магнитных полей в неподвижных и подвижных катушках соотве ствует двум процессам совершаемым электродинамическим приводом: 1. Рабочий ход (сближение катушек-поршней) ю .-в, с с неподвижная катушка- катушка- непоадижкатушкапоршень поршень нал ка2. Возвратный ход (расхождение катушекоршней) : с -« ю ю-Ф-с ю -в-с Организаш{я такой направленности может быть выполнена различными способами. При выборе схемы соединения катушек могут быть также учтены степень синхронности в перемещении катушек - поршней. На фиг.2 и 3 показаны стрелками направления сил магнитного взаимодействия при одинаковом направлении навивки проводника в катушках. В момент подачи команды на включение аппарата, что соответствует началу рабочего хода (фиг. 2), . катушки 1 и 2, взаимодействуя соответственно с катушками - поршнями 4 и 3, ускоряют пос- t ледние. По мере ослабления взаимодействия в парах 1-4 и 2-3 начинает расти взаимодействие в приближающихся друг к другу катушках - поршнях 3 и 4. Наложение перечисленных взаимодействий обеспечивает заданное и близкое к равномерному усилению катушек - поршней на дзтогасящую среду: трансформаторное масло, жидкую шестифтористую серу и др. Для целого ряда задач важна быстрюта подготовки аппарата к аовторной рабочей операции. Предлоокеиньп способ быстродействующего сведения катушек - поршней привода может быть также применен и к холостому (подготовительному ходу. На фиг. 3 показано с помощью, например, переключателя полярности 6 (он имеется тшсже и на фиг. 2), обращается силовое взаимодействие в соответствующих парах катушек и тем самым реализуется быстродействующая подготовка аппарата: катушки nopUHffl 3 и 4 начинают отталкиваться друг от друга и далее каждая из них притягается ; к соответствующим неподвижным катушкам 2 и 1. Положительшям эффектом изо1бретения является звеличение рабочего хода привода, уменьшение времени подготовительных операций и упрощение конструкции аппарата за счет уменьшения количества деталей возвратного приспособлеюш. Формула изобретения Электрод1шамический привод коммутационного агшарата, содержащий каркас, внутри которого закреплены две неподвижные электрические катушки, между которыми размещена подвижная электрическая катушка, имеющая механическую связь с рабочим органом, например с клапаном, отличающийся тем, что, с целью упрощения конструкции и повышения быстродействия, привод снабжен дополнительной подвижной катушкой - поршнем, которая размешена между неподвижными катушками, выполнена с направлением витков противоположным направлению витков первой катушки и магнитно с ней связана, а с указанным рабочим органом связана механической и гидравлической связью, причем каждая из подвижных катушек
имеет электрическую связь с неподвижной катушкой, противолежашей другой подвижной катушке.
Источники информации, принятые во внимагше при экспертизе
