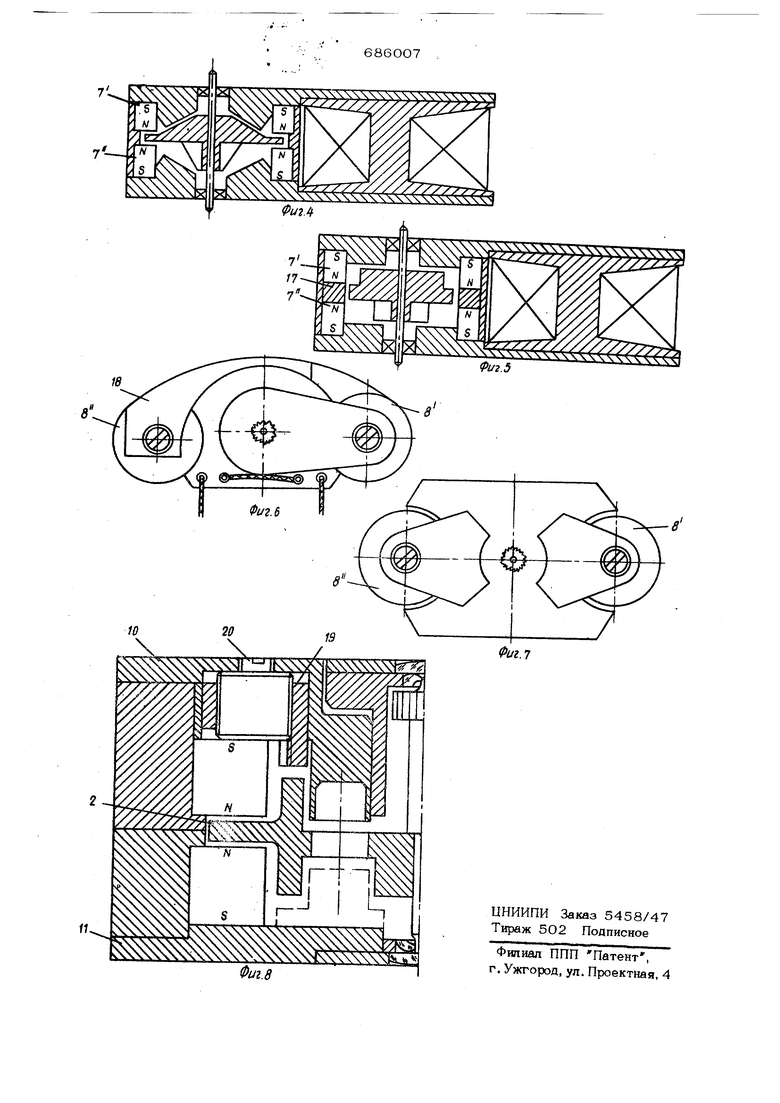
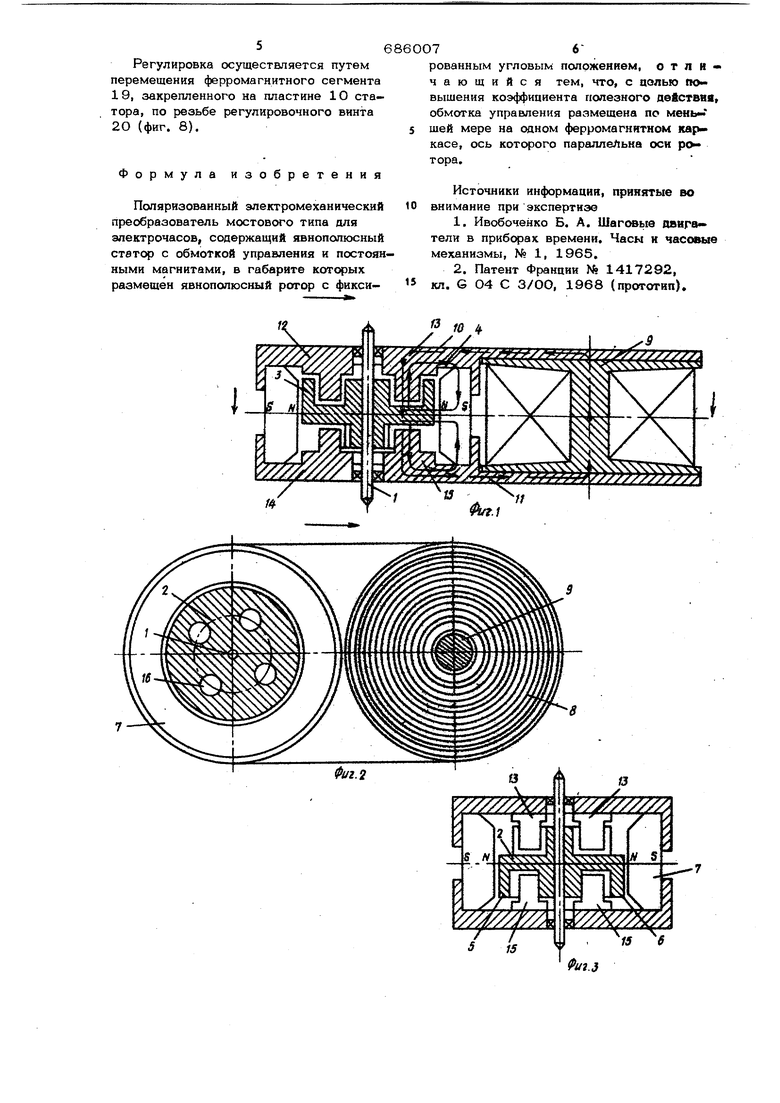
тора. Каждая из пластин снабжена полюс ными наконечниками соответственно 12, 13 и 14, 15, которые образуют воздушный зазор с полюсами ротора 2, В теле ротора 2 выполнены фиксирующие отверстия 16. (При необходимости для фиксации углового положения ротора 2 вместо отверстий могут быть использованы любые другие известные средства). Возможно выполнение полюсных выступов на пластинах статора со смещением на 9О , при этом ротсф выполняется с двумя полюсами по всей активной ялине. Предлагаемый преобразователь работа ет следующим образом.. При подаче импульса тока в обмотк5 управления 8 создается магнитное поле, силовью магнитные линии которого замыкаются через каркас 9, пластины 10 и 11 статора и ротор 2 по направлёнгао, показанному пунктирными стрелками. Ес ли магнитный поток, образованный за счет поступления импульса тока в обмотку управления 8, имеет одинаковое нап равнение (показано пунктирными стрелка ми), то магнитный поток, постоянно дей- ствующий в преобразователе, за счет дей ствия постсмнного магнита 7 имеет в за зорах разное направление {показано спло ными стрелками). Таквм образом, в одном случае проис ходит сложение магнитных потоков обмот ки управления 8 н постоянного магната а в другом магн ггные потоки вычгга. ются. В результате этого возникает вра шаюпвй момент, поворачивающий ротор 2 в CTogtssy наибольшей магнитной прово димости. По окончании импульса тока ротор 2, вращаясь под действием реактивного мо мента, обусловленного наличием магнит ной фиксации, в том же направлений, пе реходкт в следующее устойчивое состояние. Далее цикл возобновляется. Таким образом, в представленной кон струкцин псдаышаетсй КГЩ преобразователя за счет увеличения магнитодвижущей снлы(МДР обмотки управления. На бпюдаемое увеличение МДС обмотки управпенпя обусловлено размещением пос ладней вне габаритов и постоян- ных магнитов, что позволяет выполнить большее число витков обмоткиуправления на единицу омического сопротивления а также ликвидирует взаимное вли5шие ПОТОКОВ рассеивания постоянных магнитов и обмотки управления. Представленная конструкция техноло- гичнее, так как установка обмотки управления, размещенной на каркасе вне габаритов ротора и постоянных магнитов, достаточно проста. Еще больщее повышение КПД преобразователя может быть достигнуто в конструкции, представленной на фиг. 4. Постоянные кольцевыемагниты 7 и 7, намагниченные в осевом направлении, размещены симметрично относительно торцов ротора 2 и обращены к нему одноименными полюсами. В форме исполнения, представленной на фиг. 5, между магнитами 7 и 7 установлено кольцо 17 из магнитомягкого материала и к внутренней поверхности которого обращена внешняя цилиндрическая поверхность ротора 2, Благодаря этому снижается момент инерции ротора, что влечет за собой повышение добротности преобразователя в целом. Повышение МДС обмотки управления, а а следовательно, повышение КПД преобразователя можно достичь, выполнив обмотку управления в виде двух катушек управления 8 н в {(}иг. 6), каркасы которых соединены ярмом 18с образованием последовательного соединения магнитной цепи управления {при необходимости числа катушек Может быть любым). Это позволяет при неизменных высотных габаритах преобразователя и омическом conpo-J тивлении обмотки увеличить число ее витков. в форме исполнения согласно фиг, 7 обмотка управления представляет собой две катушки 8 и 8 . каркасы которых соединены с полюсами статора с образованием параллельной магнитной цепи управлений. В этом случае за счет разделения магнитотсровода обмотки управления на две ветви, число витков обмотКй при неизменном омическом сопротивлении может быть увеличено еще в большей степени. В п юдлагаемом преобразователе представлена также плавная регулировка магнитной проводимости одного из торцовых зазоров, благодаря которой устраняется разбаланс плеч моста. Плечами мостовой схемы являются проводимости комбинированного воздушного зазора, образованного с одной стороны пластиной 1О статора и ротором 2, а с другой - пластиной 11 статора и ротором 2.
Регулировка осуществляется путем перемещения ферромагнитного сегмента 1 9, закрепленного на пластине 10 статора, по резьбе регулировочного винта 2О (фиг. 8).
Формула изобретения
Поляризованный электромеханический преобразователь мостового типа для электрочасов, содержащий явнополюсный статор с обмоткой управления и постоянными магнитами, в габарите которых размешен явнополюсный ротор с фиксированным угловым положением, о т л И чающийся тем, что, с целью повышения коэффициента полезного аействна, обмотка управления размещена по мены шей мере на одном ферромагнитном кар касе, ось которого параллельна оси ро тора.
Источники информации, принятые во внимание при экспертизе
1.Ивобоченко Б. А. Шагсюью пвигв тели в приборах времени. Часы и часовые механизмы, № 1, 1965.
2.Патент Франции № 1417292, кл. G О4 С З/ОО, 1968 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Поляризационный электромеханический преобразователь для электрочасов | 1975 |
|
SU686008A1 |
| ПОЛЯРИЗОВАННЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ МОСТОВОГО ТИПА ДЛЯ ЭЛЕКТРОЧАСОВ | 1988 |
|
RU2031432C1 |
| Поляризованный электромеханический преобразователь для электрочасов | 1979 |
|
SU792211A2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2018 |
|
RU2716489C2 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА С ПОПЕРЕЧНЫМ МАГНИТНЫМ ПОТОКОМ (ВАРИАНТЫ) | 2018 |
|
RU2690666C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С ЯВНОПОЛЮСНЫМ ЯКОРЕМ | 2010 |
|
RU2416860C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАШИНА С ЯВНОПОЛЮСНЫМ ЯКОРЕМ | 2010 |
|
RU2416861C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА | 2009 |
|
RU2407135C2 |
| Электромагнитный индикатор | 1991 |
|
SU1837376A1 |
| ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1988 |
|
RU2030067C1 |