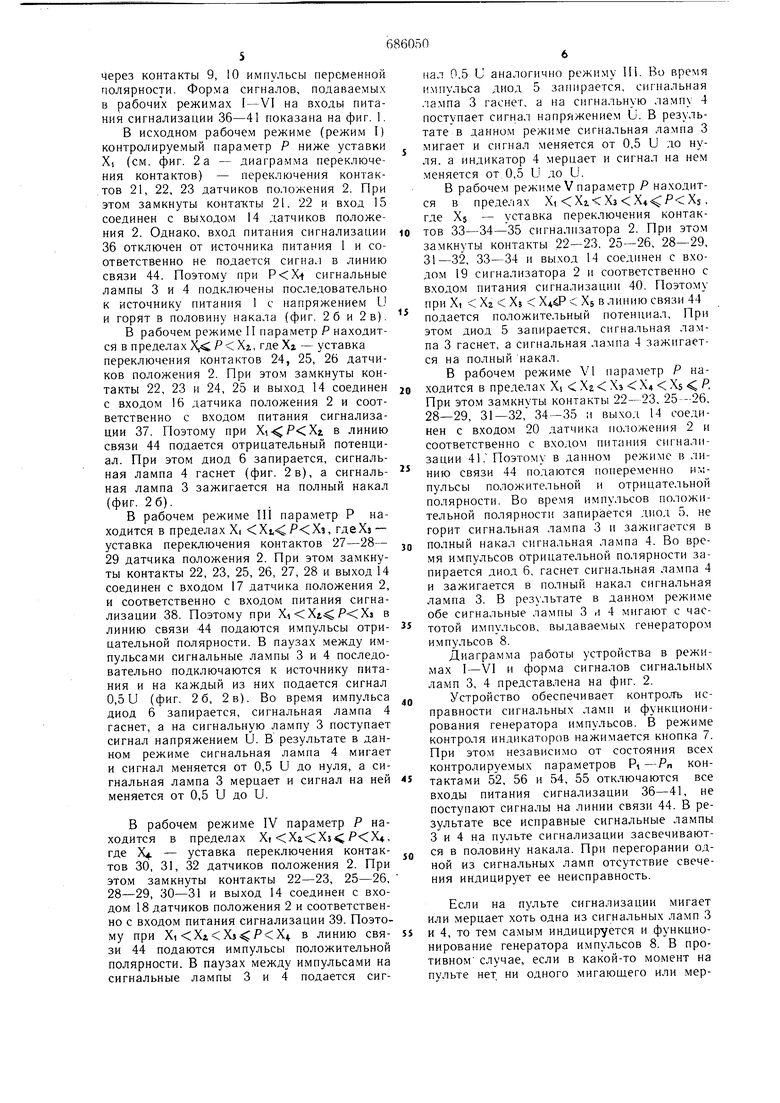
ший контакт кнопки положения с отрицательной шиной источника питания, с тремя параллельно соединенными за Мыкающими контактами первого дополнительного переключателя и непосредственно с третьим контактом положения датчиков положения, который через один из замыкающих контактов первого дополнительного переключателя соединен с четвертым контактом положения датчиков положения пятый и шестой контакты положения датчиков положения соединены через замыкающие контакты второго дополнительного переключателя и размыкающие контакты кнопки контроля с щинами источника питания, генератор импульсов связан с контактами второго дополнительного юреключателя. Три неподвижных замыкающих контакта объединены со входом питания сигнализации четвертого предела изменения параметров и соединены последовательно с размыкающими выходным ключом с первым полюсом источника питания и последовательно с первым замыкающим выходным ключом со вторым полюсом источника питания, входы питания сигнализации пятого и щестого пределов изменения параметров соединены соответственно с первым и вторым полюсом источника питания через второй и третий замыкающие выходные ключи генератора им пульсов. Работа устройства поясняется чертежами, где на фиг. 1 показана принципиальная электрическая схема устройства; на фиг. 2 - диаграмма работы устройства. Устройство содержит источник постоянного тока 1, датчики положения 2i-2л, сигнальные лампы 3(-Зп, 4i-4п соответственно первой группы индикаторов и второй 1руппы индикаторов, диоды 5i-5п, диоды Б -6п и кнопку контроля 7 с размыкающими контактами. Кроме того, устройство содержит генератор импульсов 8, управляющий размыкаюпшм 9 и замыкающими 10 11, 12 контактами одного дополнительного переключателя и другой дополнительный переключатель 13. Датчики положения 2 строятся по известным схемам, расчитаны на сигнализацию шести пределов изменения контролируемого параметра Р, имеют выход 14 и входы 15-20, соответствующие пределам изменения контролируемого параметра. В зависимости от состояния контролируемого параметра в датчике положения осуществляется соединение соответствующего входа с выходом, например, при помощи переключающих контактов 21-23, 24-26, 27-29, 30-32, 33-35. Устройство имеет шесть входов питания сигнализации 36-41, что соответствует пределам изменения контролируемых парамепров. Сигнальные лампы 3 и 4 последовательно с диодами 5 и 6 подключаются к входам питания индикации 42, 43, подключенным соответственно к положительному и отрицательному гюлюсам источника питания 1. При этом диоды 5 и 6 включены согласно и в проводяще.м направлении по отношению к полярности источника питания 1. Выходы 14 датчиков положения 2 связаны с соответствующими лампами сигнализации 3, 4 однопроводными линиями связи 44. Входы 15-20 датчиков положения 2 подключаются к одному из входов питания сигнализации 36-41. На чертеже к входу питания сигнализации 36 подключены входы 15, к входу питания 37 - входы 16, к входу питания 38 - входы 17, к входу питания 39 - входы 18, к в.ходу питания 40 - входы 19, а к входу питания сигнализации 41 - входы 20 датчиков положения 2. Однако, возможно и иное подключение в зависимости от заданной мнемоники работы индикаторов для каждого контролируемого параметра. Входы питания сигнализации 36, 37, 40 подключены к соответствующим подвижным контактам 45, 46, 47 переключателя 13, замыкающие неподвижные контакты 48, 49, 50 которой объединены с входом питания сигнализации 41 и через размыкающий контакт 9 соединены со своим размыкающим неподвижным контактом 51 и контактом 52 кнопки контроля 7, а через замыкающий контакт 10 с размыкающим неподвижным контактом 53 и контактом 54 кнопки контроля. Входы питания сигнализации 38 и 39 соединены через замыкающие контакты 12 и 11 соответственно с контактами 52 и 54 кнопки контроля 7, контакты 55 и 56 которой подключены к положительному и отрицательному полюсам источника питания 1. Принцип действия устройства заключается в следующем. Устройство контролирует состояние какого-либо параметра Р, например температуры, давления, уровня жидкости, позиции движущегося конвейера, лифта, положение управляемых механизмов и т.д. Устройство имеет шесть рабочих режимов сигнализации и два контрольных режима. При всех рабочих режимах кнопка контроля 7 и переключатель 13 находятся в исходном состоянии, показанном на фиг. 1. При этом вход питания сигнализации 36 отключен от источника питания 1, вход питания сигнализации 37 подключен к отрицательному полюсу источника питания 1, вход питания сигнализации 40 - к положительному полюсу источника питания 1, на вход .питания сигнализации 38 поступают через замыкающий контакт 12 импульсы отрицательной полярности, на вход питания сигнализации 39 - через замыкающий контакт 11 импульсы положительной полярности, а на вход питания сигнализации 41 -
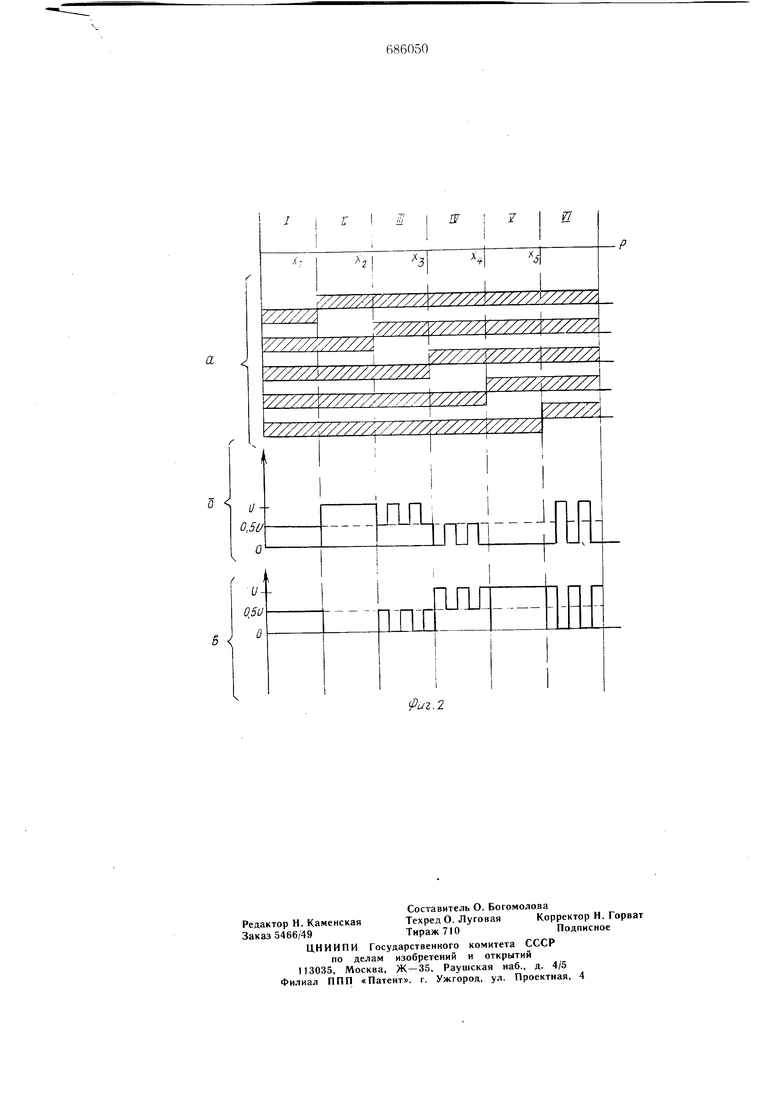
через контакты 9, 10 импульсы переменной полярности. Форма сигналов, подаваемых в рабочих режимах I-VI на входы питания сигнализации 36-41 показана на фиг. 1.
В исходном рабочем режиме (режим I) контролируемый параметр Р ниже уставки Х) (см. фиг. 2 а - диаграмма переключения контактов) - переключения контактов 21, 22, 23 датчиков положения 2. При этом замкнуты контакты 21, 22 и вход 15 соединен с выходом 14 датчиков положения 2. Однако, вход питания сигнализации 36 отключен от источника питания 1 и соответственно не подается сигнал в линию связи 44. Поэтому при сигнальные лампы 3 и 4 подключены последовательно к источнику питания 1 с напряжением U и горят в половину накала (фиг. 26 и 2 в).
В рабочем режиме И параметр Р находится в пределах X,, гдеХа - уставка переключения контактов 24, 25, 26 датчиков положения 2. При этом замкнуты контакты 22, 23 и 24, 25 и выход 14 соединен с входом 16 датчика положения 2 и соответственно с входом питания сигнализации 37. Поэтому при в линию связи 44 подается отрицательный потенциал. При этом диод 6 запирается, сигнальная лампа 4 гаснет (фиг. 2 в), а сигнальная лампа 3 зажигается на полный накал (фиг. 26).
В рабочем режиме 1Й параметр Р находится в пределах Xi , гдеХз - уставка переключения контактов 27-28- 29 датчика положения 2. При этом замкнуты контакты 22, 23, 25, 26, 27, 28 и выход 14 соединен с входом 17 датчика положения 2, и соответственно с входом питания сигнализации 38. Поэтому при в линию связи 44 подаются импульсы отрицательной полярности. В паузах между импульсами сигнальные лампы 3 и 4 последовательно подключаются к источнику питания и на каждый из них подается сигнал 0,5 и (фиг. 26, 2 в). Во время импульса диод 6 запирается, сигнальная лампа 4 гаснет, а на сигнальную лампу 3 поступает сигнал напряжением U. Б результате в данном режиме сигнальная лампа 4 мигает и сигнал меняется от 0,5 U до нуля, а сигнальная лампа 3 мерцает и сигнал на ней меняется от 0,5 U до U.
В рабочем режиме IV параметр Р находится в пределах Xi , где Хф - уставка переключения контактов 30, 31, 32 датчиков положения 2. При этом замкнуты контакты 22-23, 25-26, 28-29, 30-31 и выход 14 соединен с входом 18 датчиков положения 2 и соответственно с входом питания сигнализации 39. Поэтому при Xi . в линию связи 44 подаются импульсы положительной полярности. В паузах между импульсами на сигнальные лампы 3 и 4 подается сигнал 0,5 и аналогично режиму П1. Во время импульса диод 5 загшрается, сигнальная лампа 3 гаснет, а на сигнальную лампу 4 поступает сигнал напряжением U. В результате в данном режиме сигнальная лампа 3 J мигает и сигнал меняется от 0,5 LJ до нуля. а индикатор 4 мерцает и сигнал на нем меняется от 0,5 U до U.
В рабочем режиме V параметр Р находится в пределах Xi , где Xj - уставка переключения контактов 33-34-35 сигнализатора 2. При этом замкнуты контакты 22-23, 25-26, 28-29, 31-32, 33-34 и выход 14 соединен с входом 19 сигнализатора 2 и соответственно с входом питания сигнализации 40. Поэтому при Х| Хг Xs Xs в линию связи 44 подается положительный потенциал. При этом диод 5 запирается, сигнальная лампа 3 гаснет, а сигнальная лампа 4 зажигается на полный накал.
В рабочем режиме VI шраметр Р находится в пределах Xi Хг Хэ Х4 Xs Р. При этом замкнуты контакты 22-23, 25-26, 28-29, 31-32, 34-35 и выход 14 соединен с входом 20 датчика положения 2 и соответственно с входом питания сигнализации 41. Поэтому в данном режиме в лиSнию связи 44 подаются попеременно импульсы положительной и отрицате,1ьной полярности. Во время импульсов положительной полярности запирается диод 5, не горит сигнальная лампа 3 и зажигается в
0 полный накал сигна,1ьная лампа 4. Во время импульсов отрицательной полярности запирается диод 6, гаснет сигнальная лампа 4 и зажигается в полный накал сигнальная лампа 3. В результате в данном режиме обе сигнальные лампы 3 и 4 мигают с частотой импульсов, выдаваемых генератором импульсов 8.
Диаграмма работы устройства в режимах I-VI и форма сигналов сигнальных ламп 3, 4 представлена на фиг. 2.
QУстройство обеспечивает контрояь исправности сигнальных ,тамп и функционирования генератора импульсов. В режиме контроля индикаторов нажимается кнопка 7. При этом независимо от состояния всех контролируемых параметров Р -Рл контактами 52, 56 и 54, 55 отключаются все входы питания сигнализации 36-41, не поступают сигналы на линии связи 44. В результате все исправные сигнальные .дампы 3 и 4 на пульте сигнализации засвечиваютд ся в половину накала. При перегорании одной из сигнальных ламп отсутствие свечения индицирует ее неисправность.
Если на пульте сигнализации мигает или мерцает хоть одна из сигнальных ламп 3 и 4, то тем самым индицируется и функционирование генератора импульсов 8. В противном случае, если в какой-то момент на пульте нет ни одного мигающего или мердающего индикатора, что соответствует нахождению всех параметров в пределах одного из режимов I, II, V, может возникнуть необходимость проверки функционирования генератора импульсов 8. При этом нажимается кнопка контроля 13, через контакты которой 45 и 48, 46 и 49, 47 и 50 на входы питания сигнализации 36, 37, 40 подаются импульсы переменной полярности, поступающие также на вход питания сигнализации 41. В результате, при данном режиме контроля, все сигнальные ламйы 3 и 4 на пульте сигнализации должны мигать с частотой импульсов генератора импульсов 8. В противном случае фиксируется неисправность генератора импульсов 8.
Формула изобретения
Устройство для сигнализации положения механизмов по авт. св. № 583462, отличающееся тем, что, с целью расширения функциональных возможностей устройства.
В него введены генератор импульсов и два дополнительных переключателя, два размыкающих контакта первого дополнительного переключателя соединены с первым и вторым контактами положения датчиков положения и кнопкой контроля, размыкающий контакт второго дополнительного переключателя соединен через размыкающий контакт кнопки положения с отрицательной щиной источника питания, с тремя параллельно соединенными замыкающими контактами первого дополнительного переключателя и непосредственно с третьим контактом положения датчиков положения, который через один из замыкающих контактов первого дополнительного переключателя соединен с четвертым контактом пеложения
датчиков положения, пятый и щестой контакты положения датчиков положения соединены через замыкающие контакты второго дополнительного переключателя и размыкающие контакты кнопки контроля с шинами источника питания, генератор импульсов связан с контактами второго дополнительного переключателя.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для многоточечной сигнализации | 1973 |
|
SU488240A1 |
| Устройство для многоточечной сигнализации | 1976 |
|
SU628522A1 |
| Устройство для многоточечной сигнализации | 1983 |
|
SU1130890A1 |
| Устройство для многоточечнойСигНАлизАции | 1979 |
|
SU798937A2 |
| Устройство для многоточечной сигнализации | 1983 |
|
SU1121690A1 |
| Устройство для многоточечной сигнализации | 1980 |
|
SU898481A1 |
| Устройство для многоточечной сигнализации | 1980 |
|
SU892459A1 |
| Устройство сигнализации о состоянии контролируемого параметра | 1980 |
|
SU898480A1 |
| Устройство для технологической сигнализации | 1976 |
|
SU641477A1 |
| Устройство для технологической сигнализации | 1981 |
|
SU976462A1 |