1
Изобретение относится к низковольтному электроапнаратостроению.
Известно устройство злектродинамического петлевого компенсатора автомата серии , содержащего усиленный ребром жесткости подпружиненный подвижный контакт с токоведущей полкой и неподвижный токопровод с выступающим шарнирным концом.
В этом компенсаторе выступающий щарнирный конец неподвижного токонровода всегда отогнут в сторону подвижного контакта, что значительно уменьшает длину активно электродинамически взаимодействующей части компенсатора и, следовательно, при всех прочих равных данных снижает усилие компенсации.
Цель изобретения - увеличение усилий компенсации и иовыщение надежности в работе.
Для этого в электродинамическом петлевом компенсаторе, содержащем усиленный ребром жесткости подпружиненный подвижный контакт с токоведущей полкой и неподвижный токопровод с выступающим шарнирным концом, соединенные с помощью оси токоведущего шарнира, шарнирный конец подпружиненного подвижного контакта изогнут. Г-образно по иаправлению к неподвил ному токопроводу, выступающий шарнирный конец неподвижного токопровода смешен в сторону, противоположную подвижному подпружиненному контакту, а токоведущая полка неподвижного токопровода выполнена соответствующей Г-образной формы.
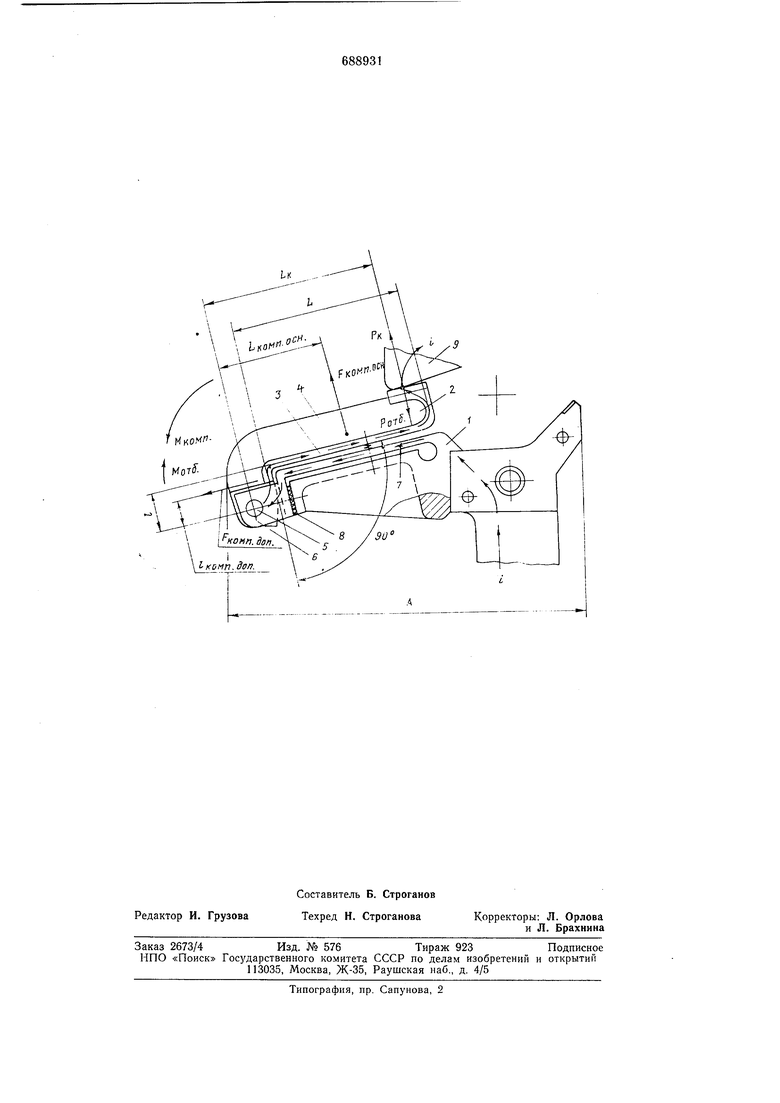
На чертеже приведена конструкция предлагаемого электродинамического петлевого компенсатора, вид сбоку, указа)1ы взаимодействующие силы, илечи, моменты.
Компенсатор состоит из неподвижного токопровода 1 и подпружиненного подвижного контакта 2 с токоведущей полкой 3 и ребром 4 жесткости, которые соединены шарннрно с помощью оси токоведущего шарнира 5.
Подпружиненный подвижный контакт 2 на шарнирном конце изогнут Г-образно, к примеру, под углом 90° по направлению к неподвижному токоироводу 1, а выступающий шарнирный коиец 6 неподвижного токопровода 1 смещен в сторону, противоположную подпружинеппому подвижному контакту 2. Неподвижный токопровод 1 также, как и подпружиненный подвижный контакт 2, выполнен с соответственно Г-образной токоведущей полкой 7, отделенной в зоне электродинамического взаимодействия, например с помощью изоляционной прокладки 8.
При таком расположении элемента компенсатора, кроме основного активно электродинамически взаимодействующего участства L (от оси шарнира 5 до контактного конца подвижного контакта 2), образуется еще и дополнительный активно электродинамически взаимодействующий участок / (от осн шарнира 5 до токоведущей полки 3 нодвнжного контакта 2).
При прохождении тока (путь тока указан стрелками) по неиодвижиому токоироподу 1, токоведущей полке 7, выступаюи1ему щарнирному концу 6, через ось токоведуплего шарнира 5, по токоведзщей полке 3 подвижного контакта 3 и верхний контакт 9 возникают электродинамические усилия комп. осн. на участке / и дополнительные . доп. на участке /комп. доп., которые создают совместный момент Мкомп.
кОМП- КОМП.ОС1Г. .ЧП.ОСП. Г КОМП X
.X ко.чп.доп. комп.осн. Г 1сомп.доп.
где /-коми. осн. - плечо, на которо.м действует основная сила компенсации комп. осн.;
комп. доп. - плечо, на котором действует дополнительная сила компенсации /комп. доп. Отсюда контактное нажатие РК
п .Мкомп.
- 1
К
,
где LK - расстояние от центра оси шарнира 5 до контактной точки.
Таким образом, момент сил компенсации . стал больше на величину дополнительного момента . доп., а момент отброса Мотб. остался тем же самым, что и был в ранее известных решениях, т. е.
МОТО РО-ГО ,
при ЭТОМ длина компенсатора осталась неизменной: А Б.
Пспользование данного технического рещения позволяет значительно увеличить эффективность электродинамического петлевого компенсатора без увеличения его длины (или уменьщить дляну компенсатора при тех же электродинамических усилиях), повысить надежность работы, а при конструктивной возможности в конкретном устройстве увеличить более значительно дополнительный учаеток /, эффективность работы компенсатора возрастет еще больше.
Формула изобретения
Электродинамический петлевой компенсатор, содержащий усиленный ребром жесткости подпружиненный подвижный контакт с токоведущей полкой и щарнирным концом и неиодвижный токопровод с выступающим шарнирным концом, соединенные с помощью оси токоведущего щарнира, отличающийся тем, что, с целью увеличения усилий компенсации и иовыщения надежности в работе, щарнирный конец подпружиненного подвижного контакта выполнен изогнутым Г-образно по направлению к неподвижному токопроводу, выступающий
шарнирный конец неподвижного токопровода смещен в сторону, противоположную подвижному подпружиненному контакту, а токоведущая полка неподвижного токопровода выполнена соответствующей Г-образной формы.
Источники информации, принятые во внимание при экспертизе 1. Кузнецов Р. С. Аппараты распределительных устройств низкого напряжения,
1962, с. 196, рис. 4-34.
L.«M«Ц- .
. доп.
11кймп.доп.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОДИНАМИЧЕСКИЙ ПЕТЛЕВОЙ КОМПЕНСАТОР ДЛЯ ЭЛЕКТРИЧЕСКИХ АППАРАТОВ | 1972 |
|
SU430450A1 |
| ЭЛЕКТРОДИНАМИЧЕСКИЙ ПЕТЛЕВОЙ КОМПЕНСАТОР | 1973 |
|
SU377903A1 |
| Электродинамический петлевой компенсатор для электрических аппаратов | 1972 |
|
SU450256A1 |
| Электродинамический прямоходовой компенсатор | 1991 |
|
SU1815684A1 |
| ЭЛЕКТРОДИНАМИЧЕСКИЙ ПЕТЛЕВОЙ КОМПЕНСАТОР | 1971 |
|
SU432610A1 |
| Автоматический короткозамыкатель | 1978 |
|
SU748568A1 |
| Электродинамический петлевой компенсатор | 1976 |
|
SU537393A1 |
| Гибкое токоведущее соединение | 1979 |
|
SU826481A1 |
| Контактная система переключающих устройств трансформаторов | 1980 |
|
SU883990A1 |
| Короткозамыкатель | 1981 |
|
SU957300A1 |