(54) СПОСОБ АКУСТИЧЕСКОГО КАРОТАЖА .
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для акустического каротажа по продольным и поперечным волнам | 1978 |
|
SU898366A1 |
| Устройство для акустического каротажа скважин | 1982 |
|
SU1065800A1 |
| Устройство для акустического каротажа | 1981 |
|
SU998991A1 |
| Устройство для акустического каротажа скважин | 1978 |
|
SU765772A1 |
| Способ определения кинематических и динамических характеристик упругих волн в горных породах | 1977 |
|
SU705399A1 |
| АППАРАТУРА ДЛЯ АКУСТИЧЕСКОГО КАРОТАЖА НЕФТЯНЫХ | 1973 |
|
SU379897A1 |
| Устройство для акустического каротажа скважин | 1979 |
|
SU779963A1 |
| Поверочно-калибровочное устройство для аппаратуры акустического каротажа | 1980 |
|
SU890318A1 |
| Способ акустического картожа скважин | 1980 |
|
SU940105A1 |
| Устройство для синхронизации аппаратуры акустического каротажа | 1983 |
|
SU1133573A1 |
I
Изобретение относится к геофизическим исследованиям нефтяных и газовых скважин акустическим методом и решает задачу определения скоростных характеристик пород путем измерения интервального времени распространения импульсов упругих волн на базе трех- или много-элементного акустического зонда.
При акустическом каротаже скважин большое значение придают точности измерения интервального времени распространения упругих колебаний в породах с повышенным Затуханием упругих волн и повышенным уровнем Шумов, вызванных движением зонда в скважине. При измерении интервального времени на таких участках скважины наблюдается срабатывание вычислителя на шумы и «перескок через цикл (работа аппаратуры на неидентичных фазах сигнала).
Известен способ измерения интервального времени, позволяющий уменьшить погрешности измерения и основанный на принципе совпадения. Принимаемый сигнал сопоставляется с поступившим ранее в систему полезным сигналом, который фиксируется в памяти системы. В случае удовлетворительного совпадения сравниваемых снгяалов принятый сигнал, оцениваемый уже как полезный, записывается в память. С приходом нового сигнала процесс повторяется 1.
Недостатком способа является его низкая точность, обусловленная тем, что полезные сигналы разных циклов измерений могут существенно различаться из-за резкой смены свойств среды заданной величины. Регистрация интервального времени А t, зафиксированного в п-м цикле измерений, производится в том случае, если Л t, отличается от интервального времени Д t., зарегистрированного в предыдущем цикле измерений, на допустимую величину.
Известен также способ акустического каротажа, основанный на измерении интервального времени и заключающийся в том, что в диапазоне частот упругих колебаний, используемых в акустическом каротаже, максимальное измерение за цикл SAt является величиной, меньшей периода этих колебаНИИ 2J.
Способ реализуется следующим образом.
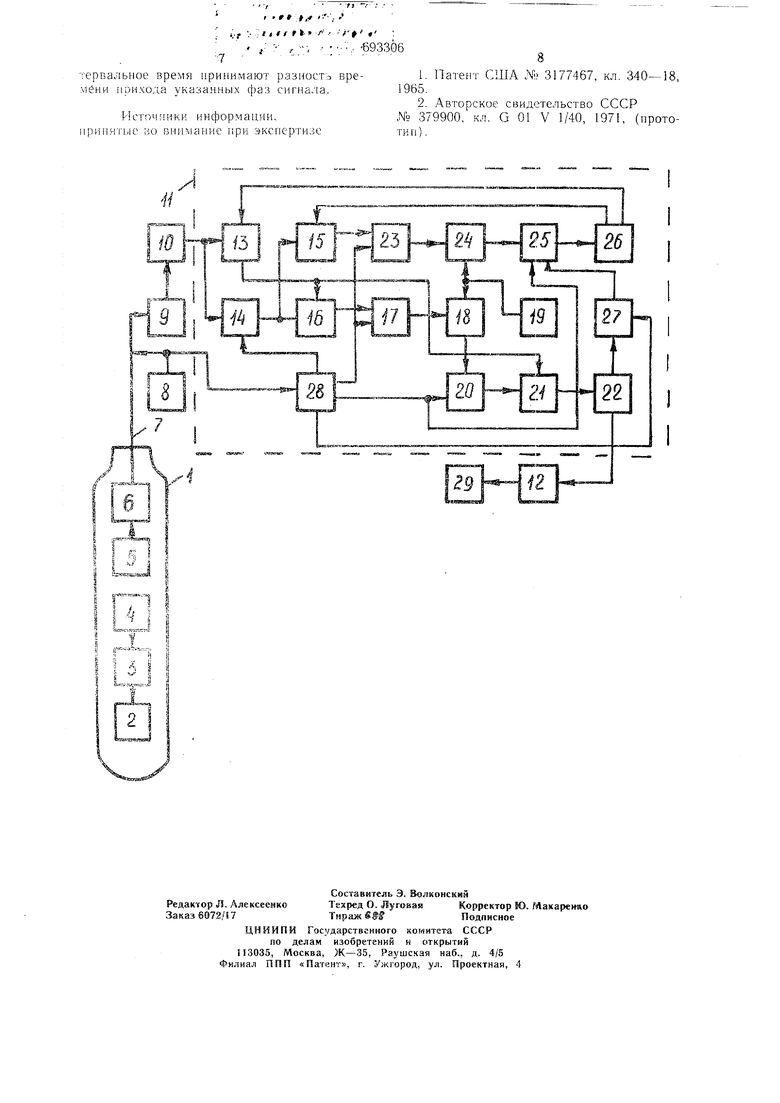
Интервальное время At, зарегистрированное в п-м цикле измерений, сравнивается е временем At., зарегистрированным в (n - 1)-м цикле. Если раз гасть между, этими временами по абсолютной величине Нёпревышает допустимой величины 5А t, то время Д ty считывается истинным Д ttijitw: ЕсЛИ же ра:3ность между двумя интервальными временами больше величины SAt, то считается, что в п-м цикле произошел «перескок через цикл, и из разности времен вычитается поправка, величина которой выбирается кратной целому числу периодов сиг.нала. Величина поправки дискретно увеличивается до тех пор, пока указанная разность не будет меньше величины SAt. .Эта разност1з; принимается за истинное прираш,ение интервального времени, которое произошло за цикл измерений. Недостаток данного способа заключается в том, что длительность периода в пакете колебаний упругой волны не является величиной постоянной,-а зависит от номера фазы колебания и поглош.ающих свойств средЫ, И величина приращения интервального времени зависит от того, на сколько циклов произошел «проскок. Кроме того, данный способ предполагает Наличие знания периода колебаний сигнала, точное измерение которого затруднительно. Цель изобретения повышение точности измерений в пластах с повышенным затуханием упругих колебаний. Поставленная цель достигается тем, что на большем шаге зонда фиксируют время прихода первой превышаюш.ей по интенсивности пороговый уровень фазы сигнала, на меньшем шаге зонда фиксируют время прихода фазы сигнала, попадающей в доверительный временной интервал, ширина которого меньше половиныпериода сигнала и ко торый расположен ва времени, раштом разности времени прихода сигнала на.большем шаге зонда и интервального времени в предыдущем цикле измерений, и за интервальное время принимают разность времен прихода указанных фаз сигнал,а. Способ реализуют следующим образом, В п-м цикле измерений регистрируют врераспространения фазьг упругих колебаний на большем щаге зонда, амплитуда которой превыщает пороговый уровень. Затем из этого времени вычитают величину интервального времени, зарегистрированную в (n-l)-M цикле измерений. Разность этих величин представляет собой ожидаемое время распространения t. идентичной фазь упругих колебаний на меньшем шаге зонда в п-м цикле измерений в случае, когд.а скоростные характеристики исследуемой среды за цикл измерений изменяются. В противном случае ожидаемое распространение иден тичной фазы колебании Т,. лежит в следующем доверительном интервале, величина которого меньще полупериода сигнала и который расположен во времени, равном разности времени прихода алгоритма на большем щаге зонда и интервального времени в предыдущем цикле измерений. В этот интервал может попасть только одна (идентичная) фаза сигнала. Так как амплитуда этой фазы больще амплитуды идентичной фазы, ранее зарегистрированной на большем щаге зонда, то она должна превыщать пороговый уровень. Определяют интервал ожидаемых значений tit и регистрируют в этом интервале время распространения идентичной фазы колебаний на меньшем шаге зонда. Затем определяют значение интервального времени в п-м цикле измерений как разность времени прихода указанных фаз сигнала. На чертеже представлена блок-схема устройства. Скважинный прибор 1, содержащий два излучателя 2, 3 упругих колебаний, блок 4 запуска излучателей, приемник 5 и блок 6 усилителя, соединен с наземной измерительной панелью каротажным кабелем 7. Панель содержит блок 8 синхронизации, фильтр 9, пороговое устройство 10, блок 11 цифровой обработки и преобразователь 12 код-а налог. Блок 11 цифровой обработки содержит две схемы совпадения 13, 14, две логические схемы ИЛИ 15, 16, измерительный триггер 17, ключ 18, высокостабильный генератор 19 счетных импульсов, основной реверсивный счетчик 20, коммутатор 21, регистр 22 памяти, вспомогательный триггер 23, ключ 24, сравнивающий (компарирующий) реверсивный счетчик 25, дешифратор 26, коммутатор 27 и блок 28 управления. Выход преобразователя подключен к регистратору 29. Интервальное время распространения упругих колебаний измеряют следующим образом. В каждом цикле измерений излучатели генерируют в окружающую скажинный прибор среду импульсы упругих колебаний, которые после прохождения по породе воспринимаются приемником. Электрические колебания с выхода приемника проходят через усилитель и поступают по каротажному кабелю в наземную измерительную панель. В наземной панели сигнал проходит через фильтр на пороговое устройство, которое выдает импульсы каждый раз, когда амплитуда сигнала превышает заданный пороговый уровень. Блок синхронизации задает частоту посылок импульсов упругих колебаний в породу (излучатели возбуждаются. поочередно) и синхронизирует работу блока 28 управления. Блок управления вырабатывает командные импульсы, которые производят следующие операции: в момент воз-, буждения излучателей триггеры 17 и 23 переводятся в единичное состояние; в момент возбуждения дальнего излучателя реверсивHEje счетчики переводятся в режим суммирования счетных импульсов и выдается команда на коммутатор 27, разрешающая перекладку кода регистра памяти в сравнивающий реверсивный счетчик 25; в момент возбуждения ближнего излучателя peBiepсивные счетчики переводятся в режим вычитания счетных импульсов; выдается сигнал на схему 14 совпадений, разрешающий прохождение импульсов с порогового устройства на схему ИЛИ 16 в течение первого полуцикла измерений - с момента возбуждения дальнего излучателя до момента возбуждения ближнего излучателя. В течение второго полуцикла импульсы порогового устройства на схему ИЛИ 16 проходят через схему 13 совпадения в том случае, когда на выходе дешифратора имеется разрешающий сигнал. В первом полуцикле п-го цикла измерений в момент возбуждения дальнего излучателя измерительный триггер 17 переводится в единичное состояние, а возвращается в исходное нулевое состояние в момент, Когда амплитуда одной из фаз сигнала превысит пороговый уровень. Длительность выходного импульса измерительного триггера, равна времени t(i,i распространения i-йфазы колебаний сигнала на большем щаге зонда. Единичный выходной сигнал измерительного триггера открывает ключ 18, разрешая прохождение счетнь1х импульсов генератора 13 на вход основного реверсивного счетчика 20. На счетчике, работающем в это время в режиме суммирования, устанавливается значение { + iiin)- Во втором полуцикле п-го цикла измерений в момент возбуждения ближнего излучателя триггер 17 устанавливается в единичное состояние, а возвращается в исходное нулевое состояние, в момент прихо;да идентичной i-й фазы колебаний, когда один из импульсов с порогового устройства попадает во временное «окно, создаваемое выходным импульсом дешифратора. Единичный выходной импульс триггера 17 в этом полуцикле имеет длительность Iji, в тече; ние которого в основном реверсивном счетчике производится вычитание счетных импульсов. Значение интервального времени в п-м цикле измерений At, t2th.-tfin., полученное в результате вычитания, перекладывается в регистр памяти 22 выходным импульсом схемы 13 совпадения, который .включает коммутатор 21.
Временное «окно определяющее интервал ожидаемых значений времени распрострйенйя i-й фазы колебаний на меньшей, базе зонда, создается следующим образом. В начале п-го цикла измерений командный импульс с блока 28 управления включает коммутатор 27. Значение интервального времени Д tx-i, записанного в регистре памяти в (п-1)-м цикле измерений, пере1у1адывается в дополнительном коде в сравнивакрщий реверсивный счетчик 25. На .счетчике уста.навливается исходное значение (-Atj.j). В первом полуцикле п-го цикла измерений на вход счетчика 25, работающего в режиме суммирования, поступают счетные импульсы в течение времени t2.in.(no аналогии с работой основного реверсивного счетчика). По окончании первого полуцикла измерений на счетчике 25 устанавливается значение (tjjjj -Atn.-i), равное среднему ожидаемому времени прихода i-й фазы колебаний от ближнего излучателя. Во втором полуцикле измерений в момент возбуждения ближнего излучателя в реверсивном счетчике 25 начинается вычйт анйе счётных импульсов. Дешифратор 26, контролирующий состояние счетчика, выделяет временной интервал измерения.
Выходной импульс дещифратора поступает на схему 13 совпадений, создавая временное «окно для прохождения импуЛьса, соответствующего моменту прихода -й фазы колебаний, с выхода порогового устройства на схему 16 ИЛИ и далее на выход измерительного трйггёрга: В следующем (п + 1)-м цикле измерений описанный выше процесс повторяется. После каждого цикла измерения информация из блока цифровой обработки 11 через преобразователь коданалог 12 поступает на регистратор 29.
Данный способ измерения интервального времени позволяет повьгсить точность измерений, так как из аппаратурного алгоритма измерения интервального времени исключаются операции, связанные с периодом колебаний сигнала. Повыщение точности измерений влечет за собой повыщение эффективности геофизических исследований буровых скважин с помощью акустического метода.....
Формула изобретения
Способ акустического каротажа, заключающийся в измерении интервального времени распространения упругих колебаний на фиксированной базе между двумя одНоиме.нными электроакустическими преобразователями, отличающийся тем, что, с целью повышения точности измерения в пластах с повышенным затуханием упругих колебаний, на большем шаге зонда фиксируют время прихода первой превышающей по интенсивности пороговый уровень фазы сигнала, на меньшем шаге зонда фиксируют время прихода фазы сигнала, попадающей в доверительный временной интервал, ширина которого меньше половины периода сигнала и кбтррый расположен во времени, раеном разности времени прихода сигнала на б ольшем шаге зонда и интервального времени в предыдущем цикле измерений, а за ин/ - -tt-f.i /д
,/ , . t.f v If f ftt -f; « ;
t ,;;.; :,:--. :693306
1
тервальнбё время принимают разность времени прихода указанных фаз сигнала.
Источники информации, принятые во внимание при экспертизе
8
JMb 379900, кл. G 01 V 1/40, 1971, (прототип).
