(54) ПРЕОБРАЗОВАТЕЛЬ ПЕРЕ.МЕЩЕНИЯ Е ПОСТОЯННЫЙ ТОК
| название | год | авторы | номер документа |
|---|---|---|---|
| Прецизионный измеритель перемещений | 1988 |
|
SU1775595A1 |
| Управляемый измерительный генератор | 1983 |
|
SU1109851A1 |
| БЛОКИНГ-ГЕНЕРАТОР | 1991 |
|
RU2030096C1 |
| Преобразователь постоянного напряжения в постоянное | 1986 |
|
SU1367112A1 |
| Устройство для измерения давления | 1990 |
|
SU1831668A3 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ ИНВЕРТОРОМ НА УПРАВЛЯЕМЫХ ВЕНТИЛЯХ | 1969 |
|
SU251664A1 |
| Полумостовой инвертор | 1988 |
|
SU1607064A1 |
| Устройство для измерения напряжения | 1980 |
|
SU900194A1 |
| УСТРОЙСТВО ДЛЯ ИМПУЛЬСНО-ФАЗОВОГО УПРАВЛЕНИЯ т-ФАЗНЫМ ВЕНТИЛЬНЫМ ПРЕОБРАЗОВАТЕЛЕМ | 1969 |
|
SU436429A1 |
| УСТРОЙСТВО ПРОДОЛЬНОЙ ДИФФЕРЕНЦИАЛЬНОЙ ЗАЩИТЫ ДВУХОБМОТОЧНЫХ СИЛОВЫХ ТРАНСФОРМАТОРОВ | 2012 |
|
RU2502168C1 |
1
Изобретение относится к системам автоматического контроля и. регулирования.
Известны преобразователи перемещения в постоянный ток 1. Однако многократное преобразование сигнала датчика значительно усложняет такие преобразоватати и снижает стабильность коэффициента передачи.
Наиболее близким по технической cyniности является преобразователь перемещения в постоянный ток, содержащий дифференциальный индуктивный датчик перемещения с первичной и вторичной обмотками, блокинг-генератор с трансформаторной положительной-обратной связью, усилитель выходного сигнала датчика с отрицательной обратной связью по переменному току и выпрямите ть на выходе 2.
Однако такой преобразователь имеет погрешность вблизи нуля, обусловленную наличием девяностоградусной составляющей сигнала небаланса датчика.
Для повышения точности преобразования первичная обмотка датчика перемещения включена ъ цепь положительной обратной связи блокинг-генератора и в эту же цепь включен дополнительный конденсатор, а вторичная обмотка датчика перемещения соединена встречно-параллельно с первичной обмоткой через дополнительный резистор, величина сопротивления которого в несколько раз больше полного сопротивления обмоток датчика.
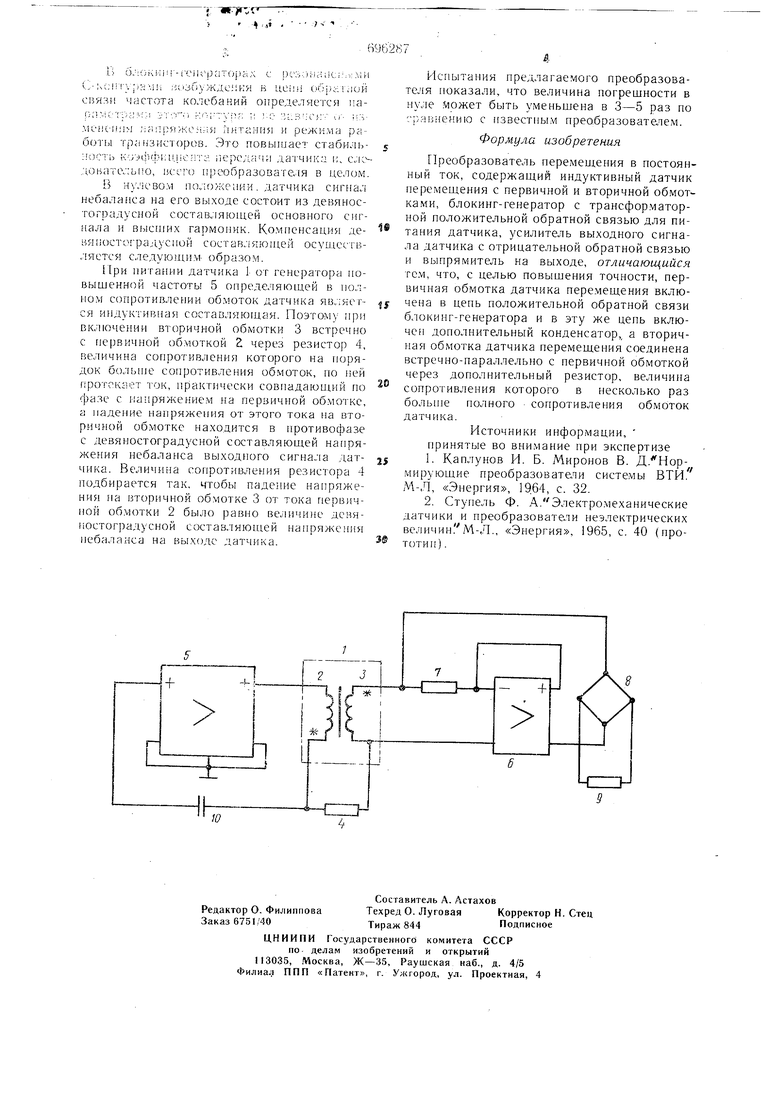
На чертеже изображен предлагаемый преобразователь.
Преобразователь содержит дифференциальный индуктивный датчик 1 перемепгения с первичной обмоткой 2 и вторичной обмоткой 3, резистор 4 компенсации, блокинггенератор 5 с положительной обратной связью, используемый для питания датчика, усилитель выходного сигнала датчика 6 с регистром 7 отрицательной обратной связи ю 5 переменному току, выпрямитель выходного сигнала усилителя 8 и цепь нагрузки 9.
Первичная обмотка 2 датчика включена в цепь положительной обратной связи блокипг-генератора 5 и в эту же цепь включен дополнительный конденсатор 10. Емкость
0 конденсатора 10 подбирается таким образом чтобы конденсатор 10 и индуктивность первичной обмотки 2 датчика 1 образовали колебательный контур.
(iiii ;;;iiif;n/KCH;iSj fiHTannsi и режима работы трс ii3f CTopo8. Это повьпиает стабильность К .;э(лф1;и.пе;:т; персдичм датчик;) i;, с.к дон;гге,, iscero 1 Побразователя в целом.
В ну,ловом положении. датчика сигнал небаланса на его выходе состоит из девяностоградусной составляющей основного сигнала и ВЫСН1И.Х гармоник. Ко.мпенсацнн деняностогра/сусиой составляюпгей осушсств.1ЯСТСЯ следующим- образом.
При нитании х атчика 1 от генератора иовышенной частоты 5 онределяюилей в нолио.м сопротивлении обмоток датчика является индуктивная составляющая. Поэтому ири включении вторичной обмотки 3 встречно с первичной обмоткой Z через резистор 4, величина сопротивления которого на порядок больи1е сопротивления обмоток, но ней протекает ток, фактически совпадаюилий по с))азе с напряжением на нервичной обмотке, а падение напряжения от этого тока на вторичной обмотке находится в нротивофазе с девяпостоградусной составляющей напряжения небаланса выходного сигнала датчнка. Величина сопротивления резистора 4 подбирается так. чтобы падение напряжения на вторичной обмотке 3 от тока первичной об.мотки 2 было равно величине деняностоградусной составляющей напряжения небаланса на выходе датчика.
д
Испытания предлагаемого преобразователя показали, что величина погрешности в нуле .1ожет быть уменьщена в 3-5 раз по сравнению с известным преобразователем.
Формула изобретения
Преобразователь перемещения в постоянный ток, содержащий индуктивный датчик перемещения с первичной и вторичной обмотками, блокинг-генератор с трансформаторной иоложительной обратной связью для питания датчика, усилитель выходного сигнала датчика с отрицательной обратной связью и выпрямитель на выходе, отличающийся тем, что, с целью повыщения точности, первичная обмотка датчика перемещения включена в цень положительной обратной связи блокинг-генератора и в эту же цеиь включен донолнительный конденсатор,, а вторичная обмотка датчика перемещения соединена встречно-параллельно с первичной обмоткой через дополнительный резистор, величина сопротивления которого в несколько раз больп е полного сопротнвлепия обмоток датчика.
Источники информации,
принятые во внимание нри экспертизе
