(54) УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДВИЖЕНИЯ ЧЕЛОВЕКА

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство контроля состояния телефонной линии | 1977 |
|
SU772509A3 |
| Устройство для предотвращения воспламенения и взрыва горючих газов | 1980 |
|
SU961546A3 |
| Автоматическое устройство сигнализации аварийных состояний | 1974 |
|
SU722504A3 |
| УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОГО СЛЕЖЕНИЯ ЗА ДЕЯТЕЛЬНОСТЬЮ СЕРДЦА И ЛЕГКИХ | 2002 |
|
RU2236169C2 |
| УСТРОЙСТВО СОЕДИНЕНИЯ ДВУХ ПРИБОРОВ ЧЕРЕЗ ЛИНИЮ СВЯЗИ ETHERNET И ПРИЕМНЫЙ ДОК ОДНОГО ИЗ ЭТИХ ПРИБОРОВ | 2013 |
|
RU2584242C2 |
| Инклинометр | 1990 |
|
SU1789855A1 |
| Генератор возвратно-поступательного движения | 1976 |
|
SU1066469A3 |
| ЕМКОСТНЫЙ УРОВНЕМЕР | 1993 |
|
RU2054633C1 |
| СИСТЕМА ДЛЯ ОПОВЕЩЕНИЯ О ПРИБЛИЖЕНИИ ПОДВИЖНОГО СОСТАВА | 1993 |
|
RU2070124C1 |
| ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕННОГО ТОКА В ПОСТОЯННЫЙ С ГАЛЬВАНИЧЕСКОЙ РАЗВЯЗКОЙ | 2008 |
|
RU2454780C2 |

1
Изобретение относится к медицинской технике, а именно к устройствам для контроля движения человека.
Известно устройство для контроля движения человека, содержащее датчик движения с электродами, находящимися в контакте с электропроводящей жидкостью, генератор переменного тока, соединенный с электродами датчика, средство сигнализации и автономный источник питания 1.
Однако известное устройство имеет ограниченное применение вследствие невозможности контроля движения при любом прложении ко нтролируемого.
Целью изобретения является обеспечение контроля движения при любом положении контролируемого.
Цель достигается тем, что в предлагаемом устройстве имеется последовательно соединенные демодулятор, усилитель, ограничитель по минимальному уровню, пороговая схема с регулятором уровня порога и мультивибратор, а датчик выполнен в виде трехэлектродной схемы, причем один из электродов датчика соединен с заземленными точками генератора и демодулятора, второй электрод соединен с выходо.м генератора, третий электрод соединен с входом демодулятора, вы.ход мультивибратора соединен со средством сигнализации, выполненным в виде источника электромагнитных колебаний.
Электроды датчика выполнены в виде изогнутых в средней части проводников, причем место сгиба является точкой наиболее близкого расположения электродов, а электропроводящая жидкость представляет собой водный раствор соли.
На выходе генератора переменного тока установлен стабилизатор амплитуды.
Полоса пропускания фильтра низкой частоты в схеме демодулятора лежит в пределах от 0,1 до 20 Гц, преимущественно от 0,5 до 3 Гц.
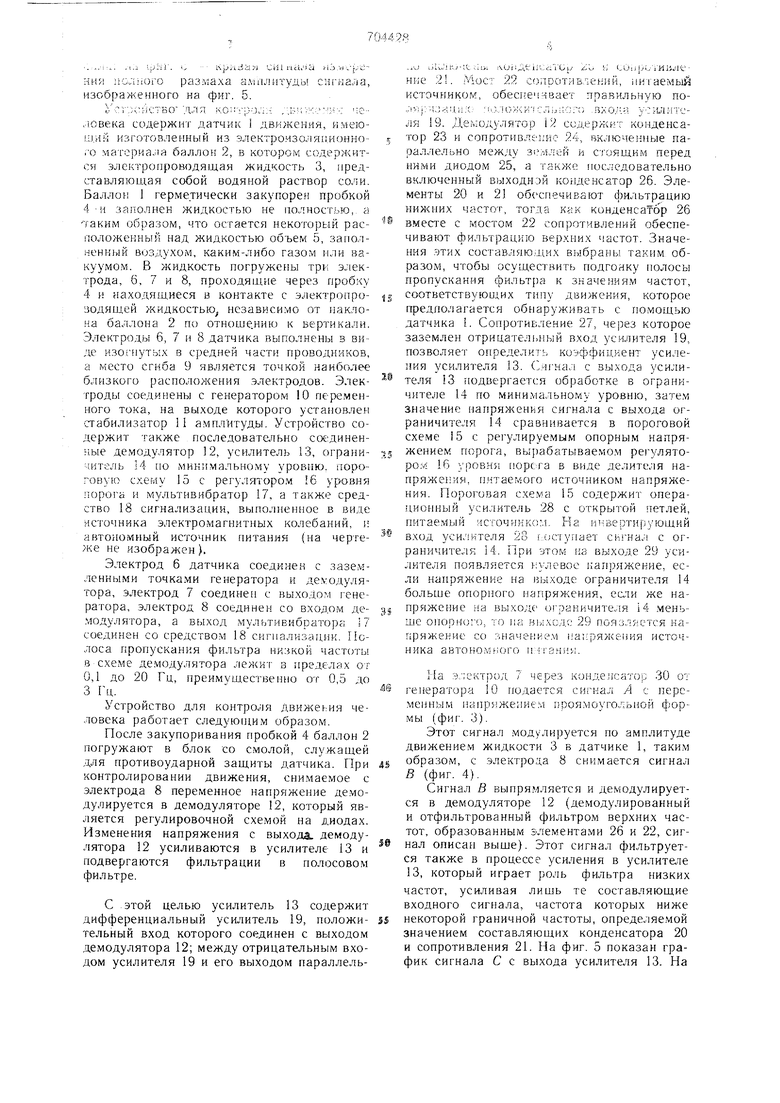
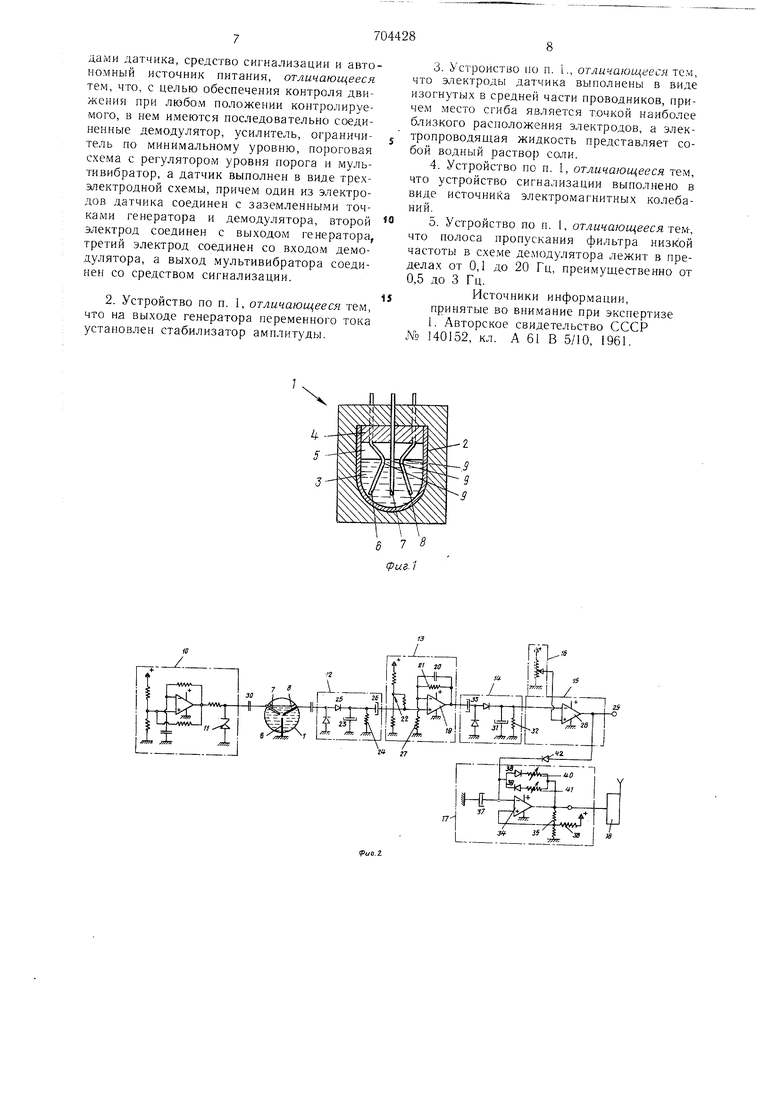
На фиг. 1 изображен датчик, поперечное сечение, вид спереди; на фиг. 2 - электрическая схема устройства, где датчик схематически представлен в горизонтальной плоскости в поперечно.м сечении; на фиг. 3 - сигнал, поступающий от генератора переменного тока; на фиг. 4 - кривая, модулированного сигнала, снимаемого со второго и третьего электродов; на фиг. 5 - кривая, демодулированного и отфильтрованного сигизобрах енного на фиг. 5. Усу.;о;-к:ТБО }1ЛЯ K0: -:pj:;;:; ,.ь;;v-:.,-;:-; че.ювека содержит датчик 1 движения, имею|.;|,ин изготовленный из электроизоляпионно,О маториа.ля баллов 2, в котором содержится электропроводящая жидкость 3, представляющая собой водяной раствор соли. Баллом 1 герметически закупорен пробкой 4 И заполнен жидкостью не полностью, а -таким образом, что остается некоторый расположенный над жидкостью объем 5, заполненный воЗл,ухом, каким-либо газом или вакуумом. В жидкость погружены три электрода, 6, 7 и 8, проходящие через пробку 4 и находящиеся в контакте с электропрозодящей жидкостью, независимо от наклона баллона 2 по отноше.нию к вертикали. Электроды б, 7 и 8 датчика выполнен з1 в виде и.зоЕнутых в средней части проводников, а место сгиба 9 является точкой наиболее близкого расположения электродов. Электроды соединены с генератором 10 пере.менного тока, на выходе которого установлен стабилизатор П амплитуды. Устройство содержит также последовательно со :диненные демодулятор 12, усилитель 13, ограничитель 14 ио минимальному уров1 Ю. пороговую схему 15 с регулятором 6 уровня порога и мультивибратор 17, а также средство 18 сигнализации, выполненное в ви.пе источника электромагнитных колебаний, и автономь ый источник питания (на чертеже не изображен). Электрод 6 датчика соединен с заземленными точками генератора и демодулятора, электрод 7 соединен с вы.хо.аом генератора, электрод 8 соединен со входом де.модулятора, а мультивибратора 17 соединен со средством 18 сигнализации. Полоса пропускания фильтра низкой частоты в схеме демодулятора лежит в пределах от 0,1 до 20 Гц, преимущественно от 0,5 до 3 Гц. Устройство для контроля движения человека работает следуюп1им образом. После закупоривания пробкой 4 баллон 2 погружают в блок со с.молой, служащей для противоударной защиты датчика. При контролировании движения, снимаемое с электрода 8 переменное напряжение де.модулируется в демодуляторе 12, который является регулировочной схемой на диодах. Изменения напряжения с выхода, демодулятора 12 усиливаются в усилителе 13 и подвергаются фильтрации в полосовом фильтре. С .этой целью усилитель 13 содержит дифференциальный усилитель 19, положительный вход которого соединен с выходом демодулятора 12; между отрицательным входом усилителя 19 и его выходом параллель-,J- uUJi S.i-lt -hi. AOriAtiK;. /,, :: 1,0и I UiMHjieние 21. Мост 22 с(1лос тив;еннй, питаемый источником, обесг;еч:- вает правильную поJiVu; ;.;:;.rill п:С : iO/l С Л ijUOfO .ПХОЛа уС Л1ГГСля 19. Демодулятор 12 содержит конденсатор 23 и сопротивле ;ис 24, включенные парал.лельно между .-1лек и Сгоящим перед ними диодо.м 25, а также последовательно включенный выходнэй конденсатор 26. Элементы 20 и 21 обеспечивают фильтрацию нижних частот, тогда как конденсатор 26 вместе с мостом 22 сопротивлений обеспечивают фильтрацию верхних частот. Значения этих составляю.ш,их выбраны таким образом, чтобы осуществить подгонку полосы пропускания фильтра к значения.м частот, соответствующих типу движения, которое предполагается обнаруживать с помощью датчика 1. Сопротивление 27, чер-ез которое заземлен отрицател1 ный вход усилителя 19, позволяет определить коэффициент усиления усилителя 13. Сягнал с выхода усилителя 13 подвергаете обработке в ограничителе 14 по минимальному уровню, зате.м значение напряжения сигнала с вы.хода ограничителя 14 сравнивается в пороговой схеме 15 с регулируе.мым опорным напряжением порога, вырабатываемо.м ре1улятором 16 уровни в виде делителя напряжения, питаемого источником напряжения. Пороговая схе.ма 15 содержит операционный усилитель 28 с открытой петлей, питаемый источником. На инвертирующий вход усилителя 28 icjciynaeT сигнал с ограничите;1к 14. При этом на выходе 29 усилителя появляется -:улевое напряжение, если напряжение на выходе ограничителя 14 больше опорного напряжения, если же напряжение iia выходе О1раничителя 14 меньще опорного, то па Bi)ixc.a,c 29 поязляется напряжение со значением пакряжепия источника автономного п-ц-анм ;. На э;;ектрод 7 через конде:|Сатор 30 от генератора 10 подается сигнал А с переменным иапряжеиием проямоугольной формы (фиг . 3). Этот сигнал модулируется по амплитуде движением жидкости 3 в датчике 1, таки.м образо.м, с .электрода 8 сни.мается сигнал В (фиг. 4). Сигнал В выпрямляется и демодулируется в демодуляторе 12 (демодулированный и отфильтрованный фильтром верхних частот, образованным элементами 26 и 22, сигнал описан выще). Этот сигнал фильтруется также в процессе усиления в усилителе 13, который играет роль фильтра низких частот, усиливая лищь те составляющие входного сигнала, частота которых ниже некоторой граничной частоты, определяе.мой значением составляющих конденсатора 20 и сопротивления 21. На фиг. 5 показан график сигнала С с выхода усилителя 13. На ЭТОМ гра,фике видно, что составляющие Si и Bi огибающей Е модулированного сигнала В не усилены, тогда как составляющая В и особенно составляющая В, ширина которых намного превыщает щирину составляющих В и Вг, подверглись значительному усилению в усилителе 13. Ограничитель 14 содержит диодную цепь регулировки, причем конденсатор 31 этой цепи соединен с сопротивлением 32, через которое происходит разрядка этого конденсатора на землю. Конденсатор 33 включен последовательно с входом названной диодной регулировочной схемы. Этот конденсатор ограничивает по минимальному значению Qj, сигнала С. Ограничитель 14 устроен по принципу схемы, выдающей, на своем выходе сигнал, превыщающий определенную амплитуду входного сигнала напряжения. Однако значение сопротивления 32 выбрано достаточно малым, чтобы сигнал на выходе ограничителя 14 значительно падал между появлением двух дледующих друг за другом составляющих Ci и d сигнала С (фиг. 6) Мультивибратор 17 представляет собой мультивибратор в ждущем режиме. Он содержит операционный усилитель 34, причем подключенное к нему сопротивление 35 обеспечивает положительную обратную связь, а положительный вход этого усилителя через сопротивление 36 соединен с источником. Отрицательный вход усилителя 34 заземлен через конденсатор 37. Два диода 38 и 39 включены параллельно и навстречу друг другу для обеспечения отрицательной обратной связи усилителя 34, арегулируемые сопротивления 40 и 41 включены последовательно с диодами 38 и 39 соответственно. Такое соединение элементов 38-41 позволяет осуществить независимую регулировку длительности выходного сигнала мультивибратора 17 (этот сигнал может принимать только значения источника питания или нулевое). Когда на выходе пороговой схемы 15 появляется сигнал высокого уровня, который был упомянут выще, через диод 42 к отрицательному входу усилителя 34 течет ток, что вызывает срабатывание схемы мультивибратора 17, препятствуя возникновению колебаний в ней. Таким образом, когда жидкость 3 находится в движении, меняется амплитуда напряжения на третьем электроде 8, благодаря чему после демодуляции и усиления возникает сигнал низкой частоты; усилитель 13 усиливает лищь ту часть сигнала низкой частоты, частота которой лежит в некоторой полосе низких частот, ограниченной снизу граничной частотой фильтра высоких частот и сверху - граничной частотой фильтра низких частот. Напряжение сигнала низкой частоты измеряется по полному размаху амплитуды в ограничителе 14, а результат этого измерения подвергается сравнению в пороговой схеме 15 с некоторым опорным уровнем, порог которого можно регулировать в зависимости от характера движения, которое предполагают контролировать. Резонансная частота датчика 1 зависит от размеров баллона. Затухание этой частоты зависит от вязкости жидкости 3. Следовательно, возможно осуществить датчик, отвечающий особенности его применения. Таким образом, датчик 1 вырабатывает сигнал, постоянно изменяющийся в зависимости от изменения положения баллона. Демодулятор 12 и усилитель 13 осуществляют анализ движений датчика 1, причем дальнейшей обработке подвергаются лищь те из этих движений, которые происходят с частотами, расположенными в определенной, описанной выше области частот. Таким образом, на выходе пороговой схемы 15 возникает сигнал, когда движения датчика 1 отвечают определенным значениям частоты амплитуды. Выход схемы 15 соединен с управляющим входом средства 18 сигнализации, питаемого автономным источником, причем оно периодически вырабатывает импульс. Эти периодические импульсы управляют работой передатчика радиосигнала Л. Эти импульсы задерживаются, когда пороговая схема 15 указывает на отсутствие движения. Установлено, что больщинство обычных движений человека соответствует сигналу низкой частоты, частота которого лежит в пределах от 0,1 до 20 Гц, преимущественно от 0,5 до 3 Гц. Таким образом, в случае, когда детектор используется для радиоконтроля движений людей, полосу пропускания устройства следует настраивать на эти значения частот путем соответствующего подбора составляющих. Кроме использования для контроля за движением людей, описанный выще детектор может быть применен для обнаружения движений земли, например, в сейсмологии, для изучения механики почв и т.д. Он может быть также использован в устройствах сигнализации против кражи. В .случае использования детектора для контроля за движениями человека, детектор находится у человека и, таким образом, может сигнализировать о движениях этого человека. Формула изобретения 1. Устройство для контроля движения человека, содержащее датчик движения с электродами, находящимися в контакте с электропроводящей жидкостью, генератор пере.менного тока, соединенный с электродами датчика, средство сигнализации и авто номный источник питания, отличающееся тем, что, с целью обеспечения контроля движения при любом положении контролируемого, в нем имеются последовательно соединенные демодулятор, усилитель, ограничитель по минимальному уровню, пороговая схема с регулятором уровня порога и мультивибратор, а датчик выполнен в виде трехэлектродной схемы, причем один из электродов датчика соединен с заземленными точками генератора и демодулятора, второй электрод соединен с выходом генератора, третий электрод соединен со входом демодулятора, а выход мультивибратора соединен со средством сигнализации. 2. Устройство по п. 1, отличающееся тем, что на выходе генератора переменно1о тока установлен стабилизатор амплитуды. 3.Устройство но п. i., отличающееся i(, что электроды датчика выполнены в виде изогнутых в средней части проводников, причем место сгиба является точкой наиболее близкого расположения электродов, а электропроводящая жидкость представляет собой водный раствор соли. 4.Устройство по п. 1, отличающееся тем, что устройство сигнализации выполнено в виде источника электромагнитных колебаний. 5.Устройство по п. I, отличающееся TQ, что полоса пропускания фильтра низкой частоты в схе.ме демодулятора лежит в пределах от 0,1 до 20 Гц, преимущественно от 0,5 до 3 Гц. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР Afo 140152, кл. А 61 В 5/10, 1961.
В,
С1
В В1 32
