Известны способы регулирования астоты обменной моипюсти :)lepгocиcтe и их объединений с использованием выделенных для ведеиия частоты генераторов, к регуляторалт которых подводятся напряженля действите.льной и стандартной частоты.
Ониеыр,аемый способ отличается от известных тем, что, загрузк -, энергосистем или их обт едииений потоками обменной мс)щности путем 11оддер/кагн-1я действительиой частоты на стандартном значении, мош,ность нервнчною двигателя каждогчз из ведущих частоту генераторов регулируют в функцлн алгебраической суммы , иропорцисиа.льных:
а) yjviy между э. д. с. данного генератора и иаиряжением стандартной частоты;
б частоте скольжеиия э. д. с. да1нюго генератора но от11ошеи ио к ианряженнга стандартной частоты;
в) угловому ускореш-ло э д.. с. данного генератора.
С целью измеиения плановой нагрузки генератора, ведундего часточу, его мощность регулируют также в функции величииы, и)онорцио1уа;н ной средней мощности но графику.
Для осуществления описываемого способа нрименеио устройство, п схему питания которого, с иелью изменения доли участия ведуитего чаcixrry генератора в восирнятни иеиредвидениоГ : нагрузки, введено регулируемое реактивное сопротивление.
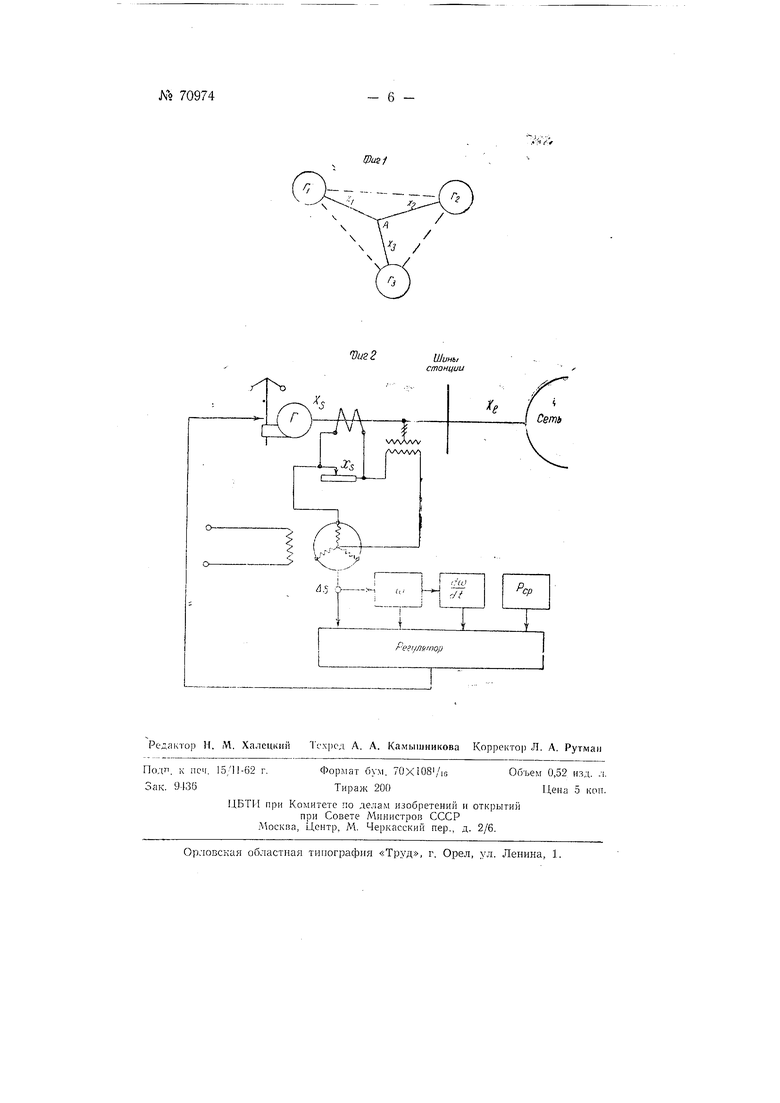
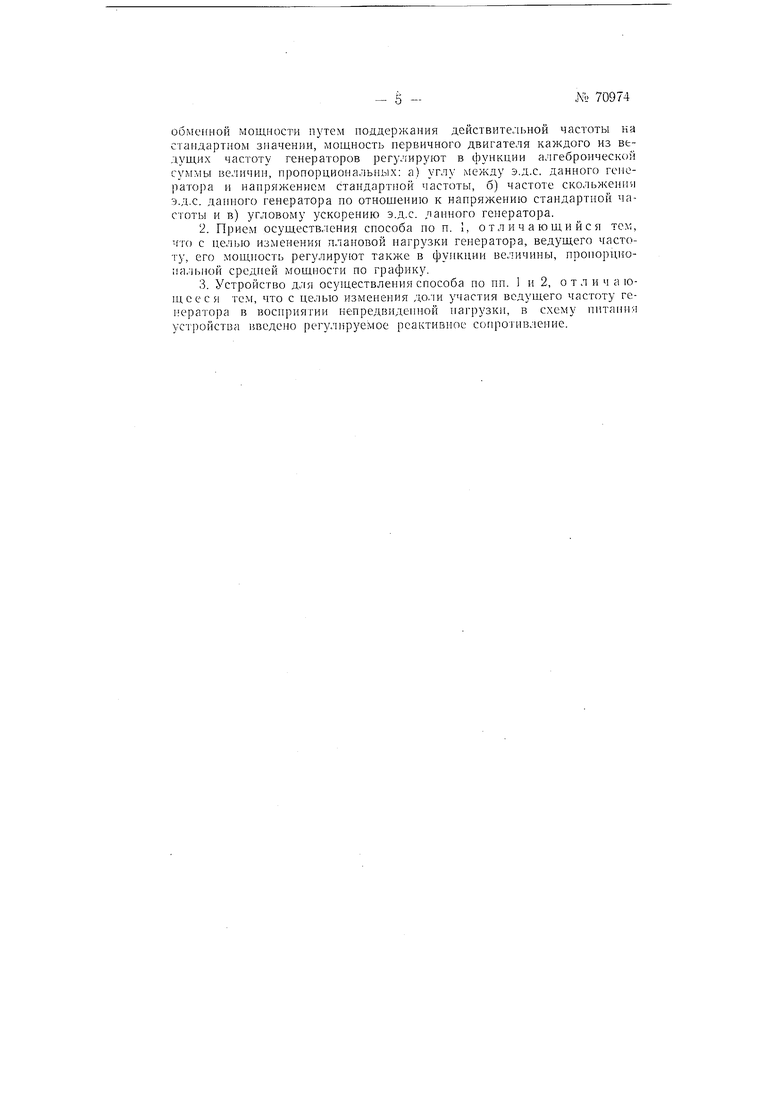
На фиг. 1 изображена схема, иоясияюш,ая описываемый способ, а на фиг. 2 -- схема устройства для осуществления этого способа.
Задача регулирования частоты энергосистем нолноетью разрещаетДЬ 70974- 2 -
ся применением критерия регулирования по иитегральиону углу и частоте системы с ведением статизма гго мощности регулируемого генератора.
Математически работа регулятора частоты при исиользовании его 3 качестве вторичного рег оЧятора, воздействующего на турбину посредством смещения характеристики скоростного регулятора, может бьггъ выражена уравнением:
.- 1 /Р . . W-W,,
гЛ -I f
T-i /Ада,, До--5 (w-w, dt.
где Л - скорость смещения статической характеристики скоростного регулятора в относительных едииицах,
Т., - постоянная времени регулятора частоты,
рр
Р 2 - мощность регулируемого генератора в относите;1ьных
единицах.
Р,1- номинальная мощность генератора, средняя мощность генератора, заданная но графику, W- мгновенное значение частоты сети,
иУ„- но.минальное значение частоты сети, задаваемое эталоном, /fj - статнзм регулятора но интегральному углу (в синхронны. секзп1дах), соответствующий изменению мощности регзлируемого генератора от О до номинального значения, К.,- статиз.м по мгновенному отклонению частоты, выражаемый в изменении частоты в долях номинальной, соответствующей загрузке генератора от О до номинальной моп1ности. До- угол, образуе.мый векторолг сети по отношению к вектору
напряжения стандартной частоты.
В силу статичности характеристик регуляторов частоты генераторы в различных точках сети загружаются однозначно в соответствии с теми статизмами по интегрально.му углу и начальными моищостями, которые им были заданы. Однако этот критерий гге учитывает территориального размещения в сети непредвиденной нагрузки и генераторов, ведущих частоту, поскольку -iS, определяемый по многим оборотам вектора сети но отнощению к эталону для всей сети практически одинаков.
При наличии в системе слабых связей, напри,мер при соединении нескольких энергосистем длинными линиями малой пропускной способности, такой критерий ,может вызвать нежелательные и даже опасные с точки зрения устойчивости перегрузки линий, требующие дополнительных нодрегзлировок. При,менение комбинированных критериев регзлирования по частоте и обменной мощности требует щирокого использования аппаратуры телеизмерений и суммирования мощности, что значительно усложняет эксплуатацию к понижает надежность системы регулирования. Кроме того, ус.товне поддержания частоты на номинальном значеини не всегда выдерживается.
Для рационального рещения задачи регулирования частоты энергосистем или их объединений с учето,м требования минимальных перетоков мощности но линиям необходимо создать в сети длительно тот режим, который имеет .место в первый момент после скачкообразного приложения нагрузки с какой-либо точке сети, когда в силу энергии
роторы генераторов и векторы их э. д. с. еохраняют свое первоначальное взаиморасположение. При этом дополнительные загрузки отдельных генераторов/ь А, Гз, питающих нагрузку, возникшую в точке Л (фиг. 1), будут обратно пронорциональны реактанцам Xi-X-. между точкой /1 п э, д. с. соответстг уюш,его генератора, и в сети автоматически установится режим иаимен.и1нх нотерь. Ясно, что регипзиая сеть при уеловни равенства и синфазности э. д. с, отдельных генераторов может быть /гутем трансфигурации приведена к аналогичному внду, поскольку перетоки между генераторами в снлу поставленного условня будут отсутствовать.
При неравеистве и несинфазиости э д. с. отдельных генераторов между станциями возинкиет некоторый нереток лющиостн, состаг5ляюций «переток но графи у.
Для создаиия онисанного режима необхо/uiMo к каждому из гсиераторов, участвующих в регулировании частоты, подвести вектор стандартной частоты и заставить генератор вращаться так, чтобы вектор его э. д. с. в стационарном режиме был синфазен или, в зависимости от заданной нагрузки по графику, опережал стандартный вектор на желаемый угол о,р. Такое сравнение векторов может быть выполнено механически.м путем илн электрически на зажимах генератора, но пр этом должна быть создана схема замещения, отобража)ощая поворот вектора э. д. с. по отношению к напряжению на зажимах, обусловленный падением напряжения в реактанце самого генератора Г (фиг. 2),
Этот метод может быть обобщен. В зависимости от желаемого участия данного генератора в восприятии непредвиденной нагрузки в схему замещения, питающую регулятор, искусственно вводится реактаиц Х-у, отличный от действительного реактанца генератора. Чем он больще, тем в меньщей степени данный генератор участвует в приеме нагрузки. В частиоети, при закон регулирования строился бы так, как будто генератор вообще не обладает реактанцем, а э.д. с. совпадает с напряжением иа зажимах. При этом фактором, ограничивающим загрузку данного генератора по отношению к оетальным генераторам, ведущим частот}, явилось бы тОоТько сопротивление участка сети до места приключения нагрузки. Такой режим регу.;1ирования может быть целесообразен в том случае, когда на из станций работает но одному генератору, ведущему чаетоту. При этом территориальное распределение неиредвидеиной нагрузки выявляется наиболее резко.
Для обеспечения устойчивоети регулироваиия каждого генератора по стандартному вектору и ускорения действия регулятора в переходном режиме воздействие на открытие впуска движущего фактора (пара или воды) должно осуществляться по комбинированному критерию, а и.дтеино, в случае применения вторичного регулятора последний должен выно.чиять регулирование по уравнению:
л - 1 / j ze - ,i 1 dw . р Т, (лГ.оУ,, K.w,, К..Щ, dt
где До- угол между вектором э.д. с. данного генератора и стандартным вектором (напряжеиие.м стандартной частоты), ж.- угловая скорость вектора э. д. с. генератора, Лд- статизм по ускорению,
dw изменение угловой скорости вектора э.д.с. генератора по
dt времени.
- 3 -Afe 70974
№ 70974- 4
Введение третьего члена в уравнение обусловливает устойчивост.ь регулирован1;я. Необходимость в нем определяется в зависимости от выбранных параметров К Kz н TZ и от соотношения нх с константами скоростного регулятора турбнны и энергосистемы, т. е. в конечном счете от требуемой точности и скорости регулирования.
Необходимым условием .ной работы системы регулировапия Я1,ляется нодведение к регуляторам выделенных для ведения частоты -енераторов напряжения стандартной частоты (стандартный вектор) с достаточной точностью, нскл Очаю1дей ложное нерерасиределение нагрузок. Для этой целн может быть нснользован централнзованн |й эталон частоты, нодводящий станда Угный вектор в каждом из генераторов но ироводам или через высокочастотный тракт с нспользова1 нем провода линнй передач. Для изменения частоты снстемы должна быт изменена частота эталогта. Возможно также нрнмененне разобщенные эталонов, но это потребовало бы точности до 10 .
При толчке нагрузки в какой-либо точке сети нока роторы генераторов не изменили своего расположения в пространстве, нагрузка между ними раснределяется обратно пропорционально реактанцам до места возникновения нагрузки. В силу инерционности и статизма скоростных регуляторов роторы тормозятся, что приводит к возникновению отрицательного третьего, а также с течением времени и второго члена уравнения регулирования. Это нриводит к нодаче импульса па смещение характеристики регулятора вверх, т. е. к загрузке машины.
По мере отставания ротора генератора от стандартного вектора в уравнении регулирова} ия проявляется также и первый члеп (отрицательный). В дальнейшем, когда замедление приостановлено и начинается ускорение генератора, хо1я частота еще и ниже номинальной, третий члеп приобретает знак плюс; далее, когда частота генератора становится вынте номинальной, сумма второго и третьего ч.ченов (ноложительных) компенсируется отрицате тьным первым ч,теном, что способствует более раннему установлению равновееия и затуханию колебаний регулятора. Равновесие в стационарном режиме устанан,ливается нри , когда ротор генератора следует за стандартным вектором. Г1ри этом ; нутреиний угол Н устанавливается на новом (увеличенном) значении, соответствующем загрузке данного генератора.
Математический анализ системы подтверждает устойчивость оиич- 1ваемой еистемы регулирования.
Поскол1,«у в стационарном состоянии восстанавливается номинальчая частота сети и следоваиие всех ведущих частоту гене))аторов за стандартным вектором, то всякая пепредвидениая нагрузка по окончании нереходпого нроцесса воспринимается только этими генераторами. Между ними нагрузка распреде.тяется обратно пропорционально реактан)1,у от места распо.чожсния нагрузки до гсиератора, прнчем эта зависимость для каждого из гене)аторов, как было указано Biiinie, може1 быть емягчена и.ти подчеркнута.
Предмет изобретения
Ь Способ регулирования частоты и обменной мощности энергосистем и нх объединений с выделенными для ведения частоты генераторами, к регуляторам которых подводятся напряжения действительной к стандарт1 ой частоты, отличающийся тем, что с целью обеспечения минимальной загрузки энергосистем или нх объединений потоками
обменной мощности путем поддержания действительной частоты на стандартном значении, мощность первичного двигателя каждого из ведущих частоту генераторов регу.чируют в функции алгеброической суммы величин, пропорциональных: а) углу между э.д.с. данного генератора и напряжением стандартной частоты, б) частоте скольжения э.д.с. данного генератора по отношению к напряжению стандартной частоты и в) угловому ускорению э.д.с. данного генератора.
2.Прие.м осуществления способа по п. 1, отличающийся тем, (ТО с целью измеиения плановой нагрузки генератора, ведущего частоту, его мощность регулируют также в функции величипы, пропорцноиа; Ы1ой средней мощности по графику.
3.Устройство для осуществления способа по ип. 1 и 2, о т л и ч а ющееся тем, что с целью изменепия до/ш участия ведущего частоту генератора в восприятии непредвидепной иагрузкп, в с.хему пптаиия устройства введено регул11руемое реактивное сопротивлеиие.
-- S -,N 70974