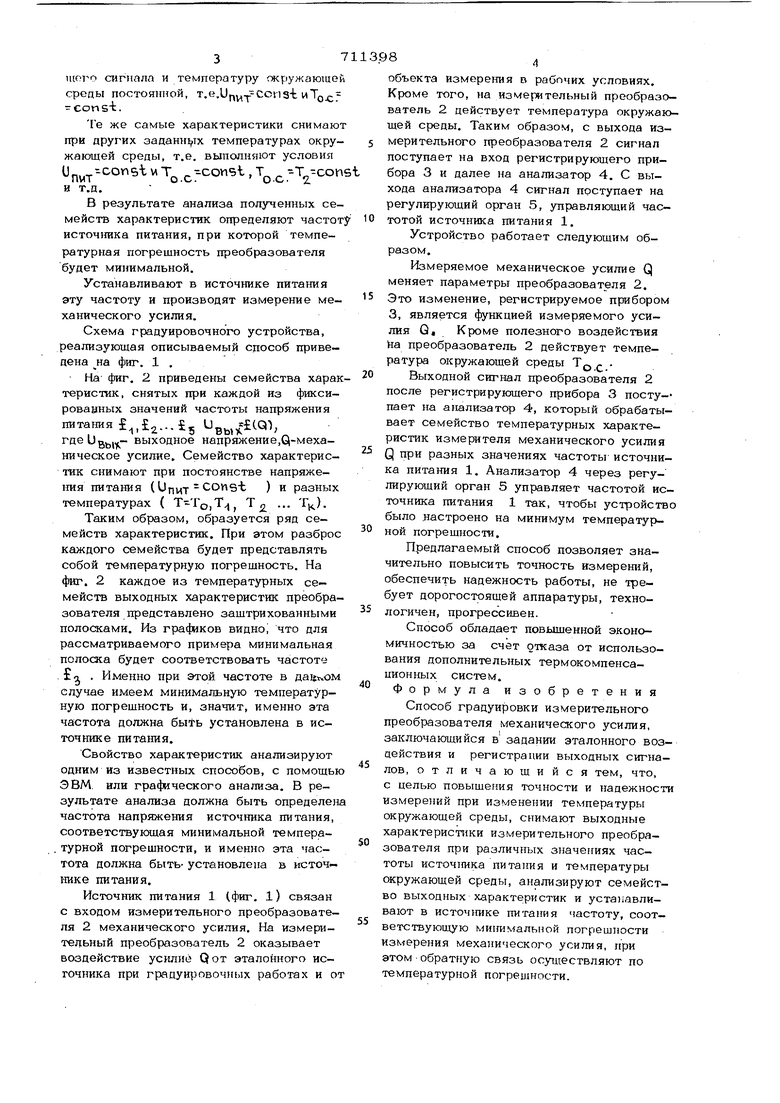
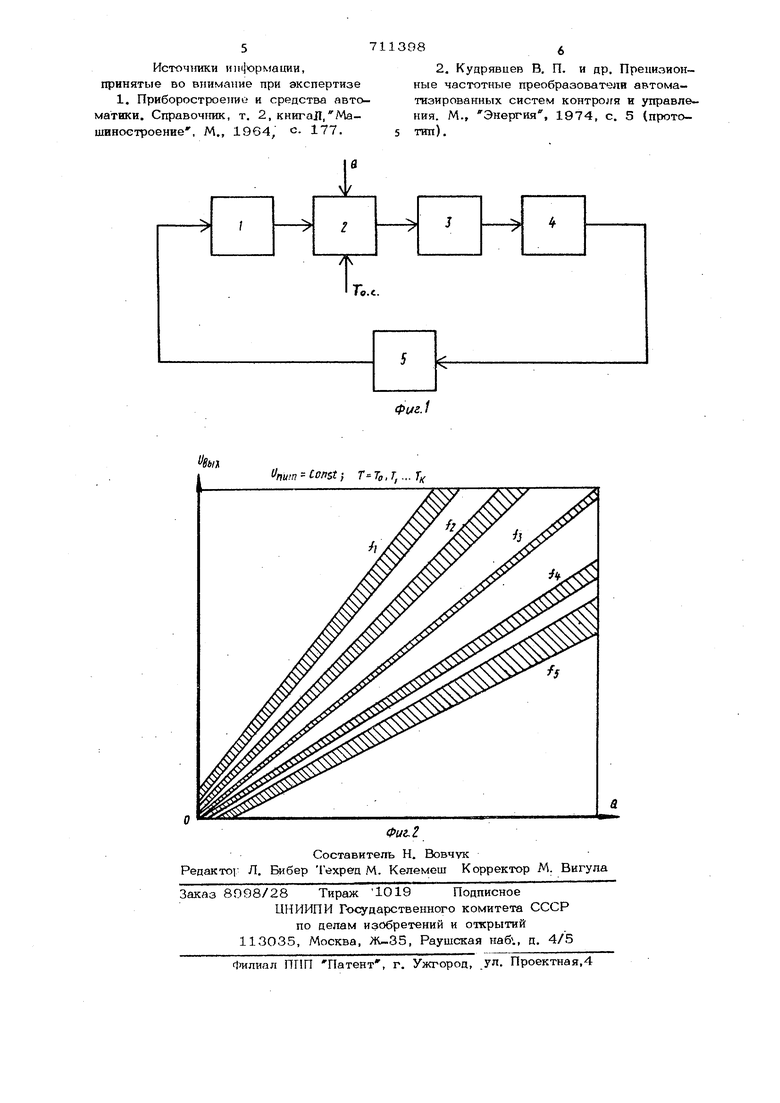
температуру окружающей того сигнала и T.e.UnviTC SlSt И TO среды постоянной о-сГ -const. Ie же самые характеристики снимаю при других заданн 1х температурах окружающей среды, т.е. выполняют условия пмт-° .. в результате анализа полученных семейств характеристик определяют частот источника питания, при которой температурная погрешность преобразователя будет минимальной. Устанавливают в источнике питания эту частоту и производят измерение механического усилия. Схема градуировочного устройства, реализующая описываемый способ приведена на фиг. 1 . На фиг. 2 приведены семейства харак теристик, снятых при каждой из фиксированных значений частоты напряжения питания ,...5 U3,tQ1, f BbiiT выходное нaпpяжeниe,Q-мexaническое усилие. Семейство характеристик снимают при постоянстве напряжения питания (Опит ) и разных температурах ( Т-То,Т Т -. TK). Таким образом, образуется ряд семейств характеристик. При этом разброс каждого семейства будет представлять собой температурную погрешность. На фиг. 2 каждое из температурных семейств выходных характеристик преобра зователя представлено заштрихованными полосками. Из графиков виднoi что для рассматриваемого примера минимальная полоска будет соответствовать частоте . Хл . Именно при Этой частоте в дай1чом случае имеем минимальную температурную погрешность и, значит, именно эта частота должна быть установлена в источнике пита1гая. Свойство характеристик анализируют одним из известных способов, с помощь ЭВМ. или графического анализа. В результате анализа должна быть определен частота напряжения источника питания, соответствующая минимальной темпера. турной погрешности, и именно эта частота должна быть- установлена в источнике питания. Источник питания 1 (фиг. 1) связан с входом измерительного преобразователя 2 механического усилия. На измерительный преобразователь 2 оказывает воздействие усилие QOT эталонного источника при градуировочных работах и о объекта измерения в рабочих условиях. Кроме того, на измерительный преобразователь 2 действует температура окружающей среды. Таким образом, с выхода измерительного преобразователя 2 сигнал поступает на вход регистрирующего прибора 3 и далее на анализатор 4. С выхода анализатора 4 сигнал поступает на регулирующий орган 5, управляющий частотой источника питания 1. Устройство работает следующим образом. Измеряемое механическое усилие Q меняет параметры преобразователя 2. Это изменение, регистрируемое прибором 3, является функцией измеряемого усилия Q, Кроме полезного воздействия ha преобразователь 2 действует температура окружающей среды Т . Выходной сигнал преобразователя 2 после регистрирующего прибора 3 посту- пает на анализатор 4, который обрабатывает семейство температурных характеристик измерителя механического усилия Q при разных значениях частоты источника питания 1. Анализатор 4 через регулирующий орган 5 управляет частотой источника питания 1 так, чтобы устройство было .настроено на минимум температурной погрешности. предлагаемый способ позволяет значительно повысить точность измерений, обеспечить надежность работы, не требует дорогостоящей аппаратуры, технологичен, прогрессивен. Способ обладает повьшюнной экономичностью за счет отказа от использования дополнительных термокомпенсационных систем. Формула изобретения Способ градуировки измерительного преобразователя механического усилия, заключающийся в задании эталонного возцействия и регистрации выходных сигналов, отличающийся тем, что, с целью повыщег1ия точности и надежности измерений при изменении температуры окружающей среды, снимают выходные характеристики измерительного преобразователя при различных значениях частоты источника питания и температуры окружающей среды, анализируют семейство выходных характеристик и уста);авливают в источнике питания частоту, соответствующую ми1гамальной погрешности измерения механического усилия, при этом обратную связь осуществляют по температурной погрешности. Источники информации, принятые во внимание при экспертизе 1. Приборостроение и средства автоматики. Справочник, т. 2, книгаЛ,Машиностроение, М., 1964, с. 177. 7113 5 8 2, Кудрявцев В, П. и др. Прецизионные частотные преобразователи автоматизированных систем контроля и управления. М., Энергия, 1974, с. 5 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ градуировки индуктивного преобразователя перемещений | 1983 |
|
SU1153231A1 |
| Способ измерения давления | 1974 |
|
SU518658A1 |
| Способ измерения силы | 1983 |
|
SU1158878A1 |
| Способ выбора рабочей точки при измерении неэлектрических параметров | 1974 |
|
SU533822A1 |
| Способ определения механических напряжений магнитоупругим преобразователем трансформаторного типа | 1989 |
|
SU1716338A1 |
| Способ градуировки информационно-измерительного канала и устройство для его реализации | 1980 |
|
SU871165A1 |
| Способ одновременного измерения нескольких параметров одним чувствительным элементом | 1980 |
|
SU1008616A1 |
| СПОСОБ УМЕНЬШЕНИЯ ТЕМПЕРАТУРНОЙ ПОГРЕШНОСТИ ИЗМЕРЕНИЯ МНОГОКООРДИНАТНЫХ СМЕЩЕНИЙ ТОРЦОВ ЛОПАТОК ОДНОВИТКОВЫМ ВИХРЕТОКОВЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2012 |
|
RU2519844C2 |
| Способ поверки терморезисторов | 1977 |
|
SU684341A1 |
| Устройство для определения динамических характеристик термоанемометров | 1981 |
|
SU970256A2 |
