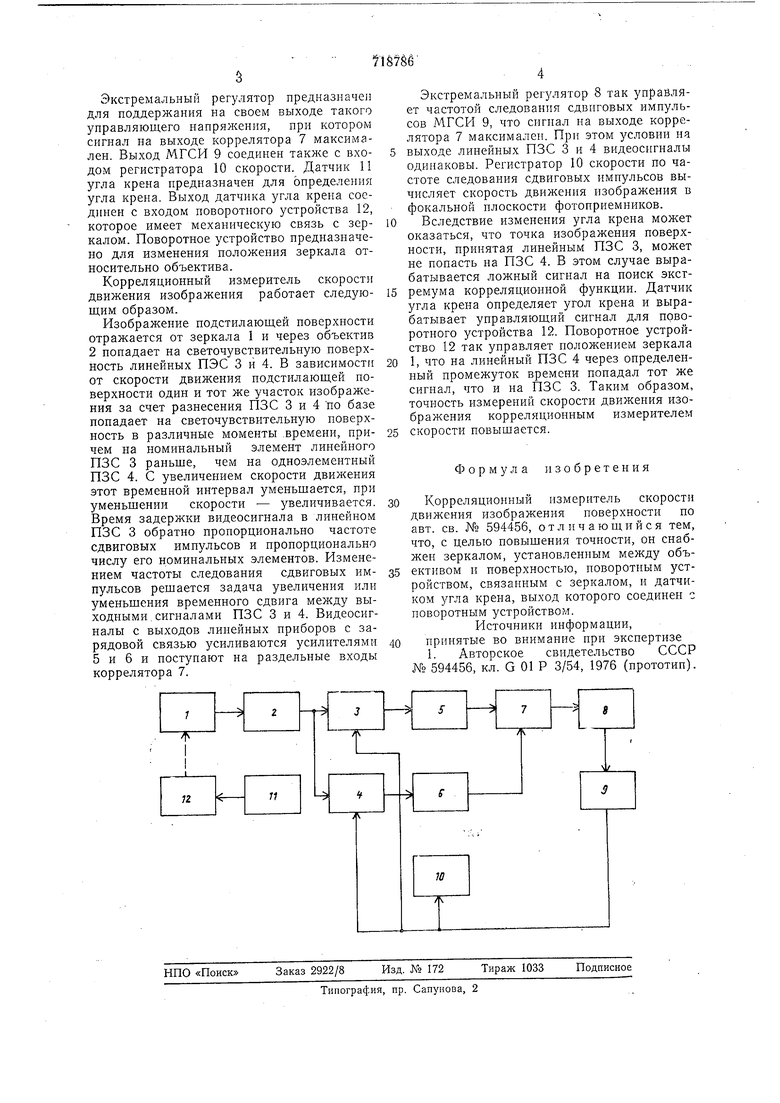
Экстремальный регулятор предназначен для поддержания на своем выходе такого управляющего напряжения, прн котором сигнал на выходе коррелятора 7 максимален. Выход МГСИ 9 соединен также с входом регистратора 10 скорости. Датчик И угла крена предназначен для определения угла крена. Выход датчика угла крена соединен с входом новоротного устройства 12, которое имеет механическую связь с зеркалом. Поворотное устройство предназначено для изменения положения зеркала относительно объектива. Корреляционный измеритель скорости движения изображения работает следующим образом. Изображение подстилающей поверхности отражается от зеркала 1 и через объектив 2 попадает на светочувствительную поверхность линейных ПЭС 3 и 4. В зависимост от скорости движения подстилающей поверхности один и тот же участок изображения за счет разнесения ПЗС 3 и 4 по базе попадает на светочувствительную поверхность в различные моменты .времени, причем на номинальный элемент линейного ПЗС 3 раньще, чем на одноэлементный ПЗС 4. С увеличением скорости движения этот временной интервал уменьщается, при уменьщении скорости - увеличивается. Время задержки видеосигнала в линейном ПЗС 3 обратно пропорционально частоте сдвиговых импульсов и пропорционально числу его номинальных элементов. Изменением частоты следования сдвиговых импульсов рещается задача увеличения или уменьшения временного сдвига между выходными, сигналами ПЗС 3 и 4. Видеосигналы с выходов линейных приборов с зарядовой связью усиливаются усилителями 5 и 6 и поступают на раздельные входы коррелятора 7. П 4 Экстремальный регулятор 8 так управляет частотой следования сдвиговых импульсов МГСИ 9, что сигнал на выходе коррелятора 7 максимален. При этом условии на выходе линейных ПЗС 3 и 4 видеосигиалы одинаковы. Регистратор 10 скорости по частоте следования сдвиговых импульсов вычисляет скорость движения изображения в фокальной плоскости фотоприемников. Вследствие изменения угла крена может оказаться, что точка изображения поверхности, принятая линейным ПЗС 3, может не попасть на ПЗС 4. В этом случае вырабатывается ложный сигнал иа поиск экстремума корреляционной функции. Датчик угла крена определяет угол крена и вырабатывает управляющий сигнал для поворотного устройства 12. Поворотное устройство 12 так управляет положением зеркала 1, что на линейный ПЗС 4 через определенный промежуток времени попадал тот же сигнал, что и на ПЗС 3. Таким образом, точность измерений скорости движения изображения корреляционным измерителем скорости повышается. Формула изобретения Корреляционный измеритель скорости движения изображения поверхности по авт. св. № 594456, отличающийся тем, что, с целью повышения точпости, он снабжен зеркалом, установленным между объективом и поверхностью, поворотпым устройством, связанным с зеркалом, и датчиком угла крена, выход которого соединен с поворотным устройством. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 594456, кл. G 01 Р 3/54, 1976 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Корреляционный измеритель скорости | 1976 |
|
SU594456A1 |
| Корреляционный измеритель скорости движения изображения | 1983 |
|
SU1093977A1 |
| Корреляционный измеритель скорости движения изображения поверхности | 1977 |
|
SU650010A1 |
| Устройство для формирования сигнала изображения | 1978 |
|
SU681579A1 |
| Корреляционный измеритель скорости движения изображения | 1985 |
|
SU1303942A1 |
| Измеритель скорости движения изображения поверхности | 1989 |
|
SU1705748A1 |
| Датчик скорости изображения | 1979 |
|
SU822032A1 |
| Датчик скорости движения изображенияОб'ЕКТА | 1979 |
|
SU853545A1 |
| Измеритель скорости движения | 1983 |
|
SU1093973A1 |
| Датчик скорости движения изображения поверхности | 1989 |
|
SU1700481A1 |
