(54) УСТРОЙСТВО ДЛЯ ПОВЕРКИ ДИНАМОМЕТРОВ И СИЛОЙЗМЕРИТЕЛЬНЫХ ДАТЧИКОВ
1
Изобретение относится к технике измерения силы и может быть использовано при создании средств поверки динамометров и силоизмерительных датчиков класса точности 0,26 - 1,0 в диапазоне усилий Н, преимущественно передвижных устройств для поверки динамометров и датчиков на местах эксплуатации.
Известно устройство для тарировки и 1 поверки динамометров и весов, содержащее пресс и поршневой манометр, в котором для уменьшения трения поршень перемещается в направляющих качения, а цилиндр выполнен вращающимся 1.
Это устройство, отличается сложностью, так как требует высокоточной обработки соприкасающихся поверхностей поршня и цилиндра, наличия привода для вращения цилиндра и системь подпитки для компенсации утечек.
Наиболее близким по технической сущности к предлагаемому является устройство, в котором поршень связан с реверсором щаровым шарниром, а реверсор снабжен балансирным грузом 2.
Однако в этом устройстве направление действия силы, выдерживается не точно, а
|rK JijytA I.U
at ij 4ti W-K ; s :i-T; -..,i4i .Ui-:,. I.
2;ff- - Ij; У.З ЗыЙКС Л -- - -.-r,,.
с некоторой погрешностью, зависящей от трения в шаровом шарнире, и тем самым создается дополнительная погрешность от несовпадения направления действия силы с силовой осью поверяемого динамометра или датчика. Этот недостаток особенно заметен при использовании устройства как передвижного для поверки на местах эксплуатации поверяемых динамометров и датчиков. Кроме того, известное устройство не позволяет поверять комплекты из несколь(0 ких одновременнЬ нагружаемых датчиков, что необходимо при поверке весоизмерителей с двумя, тремя и четырьмя датчиками под взвешиваемой емкостью, сигнал которых суммируется в одном вторичном приборе.
15
Целью изобретения является расширение функциональных возможностей (обеспечение поверки весоизмерителей с несколькими одновременно нагруженными датчиками).
Эта цель достигается тем, что между
20 реверсом и поршнем введен двухсторонний держатель датчиков, в нижней части которого размещены дополнительные балансирные грузы, причем поршень соединен с цилиидром эластичной мембраной, а основные и дополнительные балансйрныё грузы установлены с возможностью регулировки их положения относительно силовой оси устройства.
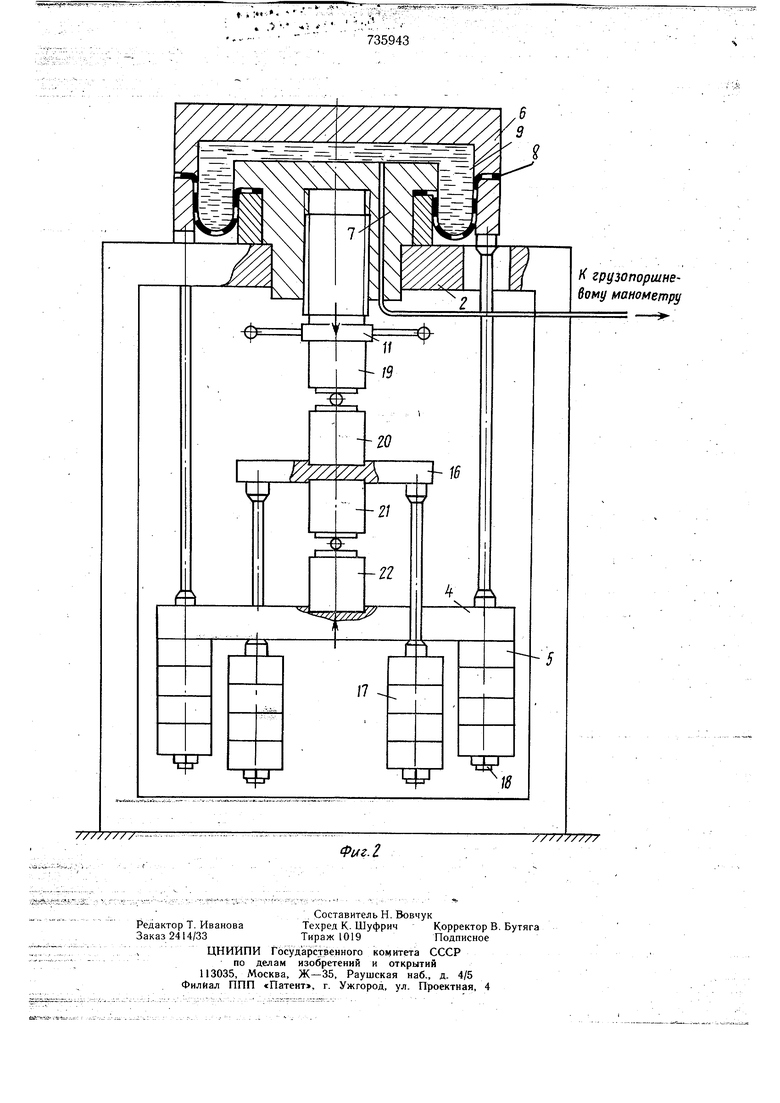
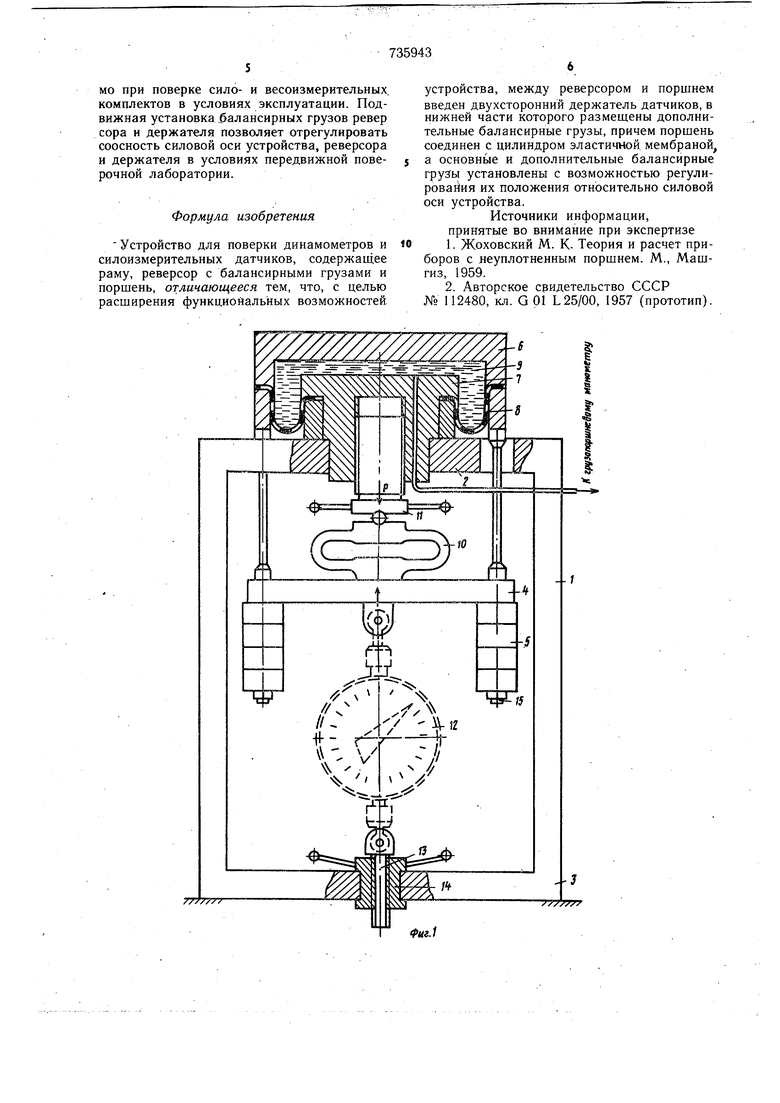
На фиг. 1 изображено предлагаемое устройство для поверки динамометров и силоизмерительных датчиков, общий в.ид; на фиг. 2 - исполнение реверсора для случая поверки четырех силоизмерительных датчиков.
Устройство содержит раму 1 с верхней 2 и нижней 3 траверсами, реверсор 4 с балагтсирнЫми грузами 5, цилиндр 6 и поршень 7. Цилиндр прикреплен к реверсору и соединен с поршнем посредством эластичной перекатывающейся мембраны 8, образуя замкнутую полость 9, соединенную с грузопоршневым манометром (на чертеже не показан). Мембрана содержит герметизирующие слои из резины и армируюо ие слои из тонкой металлической проволоки. Поршень, в свою очередь, прикреплен к верхней траверсе 2 рамы. Поверяемый динамо.метр сжатия 10 устанавливается между реверсором и регулируемым упором 11, ввинченным в поршень. Динамометр растяжения 12 при поверке устанавливается между реверсором и регулируемой тягой 13, присоединенной к траверсе рамы 1. Длина регулируется резьбовой втулкой 14.
Балансируемые грузы прикреплены ,к реверсору стяжными болтами 15/проходящими сквозь них с зазором, позволяюашм смещать грузы относительно реверсора в горизонтальной плоскости.
Комплект из четырех силоизмерительных датчиковJработающих на ободий вторичный прибор,-устанавливается с помощью промежуточного держателя 16, также имеющего балансирные грузы 17, установленные с зазором на стяжных болтах 18. Датчики 19-22 устанавливаются, как показано на фиг. 2, . в соответствующие гнезда реверсора, упора и промежуточного держателя.
Устройство работает следующим образом.
В исходном положении, когда поверяемый динамометр не нагружен, вес балансирных грузов 5, реверсора 4 и цилиндра б уравновешивается давлением жидкости, создаваемым весом вращающегося порщня и грузовой тарелки грузопорщневого манометра. В этом положении добиваются соосности динамометра 10 с силовой осью устройства (направлением действия силы Р) путем перемещения грузов 5 в горизонтальной плоскости, после чего их закрепляют на реверсоре 4.
После установки динамометра 10 или 12 согласно фиг. 1 упором 11 или резьбовой втулкой 14 выбирают зазоры в соединениях. Так же устанавливают поверяемый датчик, если он одинв измерительном комплекте. Далее насосом грузопорщневого манометра подают жидкость в полость 9 до
тех пор, пока давление в ней не станет равным заданному для данной ступени нагружения. При этом за счет податливости динамометра (датчика) и деталей реверсора цилиндр 6 проходит некоторый путь относиJ тельно порщня 7. Мембрана 8 перекатывается по наружной поверхности поршня и внутреней поверхности цилиндра 6, не меняя своей эффективной площади и, следовательно, сохраняя постоянное соотнощение между давлением в гголости 9 и силой Р,
о действующей на поверяемый динамометр (датчик). Свободная часть мембраны 8 под действием внутреннего давления сохраняет форму половины тора, центрируя цилиндр б относительно порщня 7 и в то же время возможность цилиндру 6 вместе с реверсором 4 качаться вокруг центра мембраны 8, обеспечивая самоустановку динамометра (датчика) по оси действия силы Р, и выполняя роль шарового щарнира с чисто жидкостным трением. После всплытия
0 поршня грузопорщневого манометра производят отсчет показаний поверяемого динамометра (датчика) и в таком же порядке проводят поверку по всем ступеням нагружения и разгружения, заканчивая ее разгружением динамометра (датчика).
При поверке комплекта из четырех датчиков, работающих на один вторичный прибор, суммирующий их показания, датчики устанавливают, как пбказано на фиг. 2, ис..польззя промежуточный держатель 16. Соосности держателя 16 с осью действия .силы Р добиваются перемещением грузощ 17 в горизонтальной плоскости, после чего их закрепляют на стяжных болтах 18. Далее упором И выбирают зазоры в соединениях и производят нагружение и поверку, какопи5 сано выше. При этом на все датчики действует одна и та же сила Р, создаваемая дав лением жидкости в полости 9, а на датчики 21 и 22 кроме нее действует сила веса грузов 17 и держателя 16. Эта сила определяg ется заранее и учитывается при отсчете показаний датчиков 21 и 22. При поверке комплекта из трех датчиков датчик 19 исключается; а датчик 20 опирается непосредственно на упор 11. При поверке комплекта из двух датчиков исключаются датчики 20 и 21 и
S промежуточный держатель 16 не используется.
Взаимное располож.ение и связь деталей устройства (закрепление цилиндра к реверсору, поршня к раме и соединение поршня с цилиндром эластичной .мембраной) позволяет исключить из конструкции шаровой шар нир и устранить погрешности от трения в нем. Благодаря введению двустороннего держателя с балансирным грузом в нижней части достигается возможность поверки измерительных комплектов с тремя и четырьмя датчиками путем одновременного нагружения всех датчиков одной и той же силой, что необходнМО при поверке сило- и весоизмерительных, комплектов в условиях эксплуатации. Подвижная установка 5алансирных грузов ревер сора и держателя позволяет отрегулировать соосность силовой оси устройства, реверсора и держателя в условиях передвижной поверочной лаборатории.
Формула изобретения
Устройство для поверки динамометров и силоизмерительных датчиков, содержащее раму, реверсор с балансирными грузами и поршень, отличающееся тем, что, с целью расширения функциойальных возможностей
устройства, между реверсором и поршнем
введен двухсторонний держатель датчиков, в нижней части которого размешены дополнительные балансирные грузы, причем поршень соединен с цилиндром эластичной мембраной, а ocHOBHbie и дополнительные балансирные грузы установлены с возможностью регулировайия их положения относительно силовой оси устройства.
Источники информации, принятые во внимание при экспертизе
1.Жоховский М. К. Теория и расчет приборов с неуплотненным поршнем. М., Машгиз, 1959.
2.Авторское сридетельство СССР
№ 112480, кл. G 01 L25/00, 1957 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| СИЛОНАГРУЖАЮЩЕЕ, ВЕСОСИЛОИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 2003 |
|
RU2249799C1 |
| МАШИНА СИЛОВОСПРОИЗВОДЯЩАЯ ПЕРВОГО РАЗРЯДА С ДИАПАЗОНОМ ХРАНЕНИЯ И ПЕРЕДАЧИ ЕДИНИЦЫ ОТ 1 кН ДО 1000 кН С ПРЕДЕЛОМ ДОПУСКАЕМЫХ ЗНАЧЕНИЙ ДОВЕРИТЕЛЬНЫХ ГРАНИЦ ОТНОСИТЕЛЬНОЙ СУММАРНОЙ ПОГРЕШНОСТИ 0,02% | 2018 |
|
RU2687296C1 |
| УСТРОЙСТВО ДЛЯ ПОВЕРКИ ВЕСОВ | 1992 |
|
RU2082113C1 |
| МАШИНА СИЛОЗАДАЮЩАЯ (СИЛОИЗМЕРИТЕЛЬНАЯ) СЖАТИЯ ОБРАЗЦОВАЯ | 2011 |
|
RU2456565C1 |
| УСТАНОВКА СИЛОИЗМЕРИТЕЛЬНАЯ ГИДРАВЛИЧЕСКАЯ ОБРАЗЦОВАЯ | 2003 |
|
RU2265813C2 |
| МАШИНА СИЛОЗАДАЮЩАЯ (СИЛОИЗМЕРИТЕЛЬНАЯ) ОБРАЗЦОВАЯ РАБОЧАЯ ГИДРАВЛИЧЕСКАЯ | 2010 |
|
RU2431123C1 |
| МАШИНА ГИДРАВЛИЧЕСКАЯ СИЛОИЗМЕРИТЕЛЬНАЯ ОБРАЗЦОВАЯ | 1997 |
|
RU2122715C1 |
| Устройство для тарировки и поверки динамометров, весов и т.п. | 1949 |
|
SU81674A1 |
| МАШИНА СИЛОВОСПРОИЗВОДЯЩАЯ ЭТАЛОННАЯ | 2012 |
|
RU2494360C1 |
| Силоизмерительная машина | 1981 |
|
SU998884A1 |