ние с заданной перегрузкой,требуется значительно более мощный возбудитель, а при использовании возбудителя колебаний той же мощности cyщecт венно снижается допустимая полезная .нагрузка, т.е. вес испытуемого объекта.
Наиболее близким к изобретению по технической сущности и достигаемому результату является способ компенсации эксцентриситета нагрузки электродинамического возбудителя колебаний, заключающийся в том, что к подвижной системе возбудителя колебаний прикладывают силы воздействием на нее магнитного поля, которое формируют из отдельных участков, контролируют поперечные составляющие колебаний подвижной системы, и,регулируя величины магнитных потоков отдельных участков, СВОДЯТ к минимуму действие.возмущающих моментов, обусловленных эксцент- риситетом нагрузки sQ .
Согласна этому способу отдельные участки упомянутого магнитного П9ля создают отдельной магнитной системой, которая воздействует на якорь, соединяемый с подвижной системой возбудителя, колебаний посредством штока.
Присйединение к подвижной системе штока с якорем увеличивает вес под-, вижной системы, что приводит к снижению допустимой полезной нагрузки.
Целью изобретения является увеличение допустимой полезной нагрузки.
Это достигается благодаря тому, что из отдельных участков формируют постоянное магнитное поле возбудителя колебаний. В результате этого силы, устраняющие обусловленные эксцентриситетом нагрузки возмущающие моменты, прикладываются непосредственно к подвижной катушке возбудителя колебаний, вследствие чего снижается вес подвижной системы.
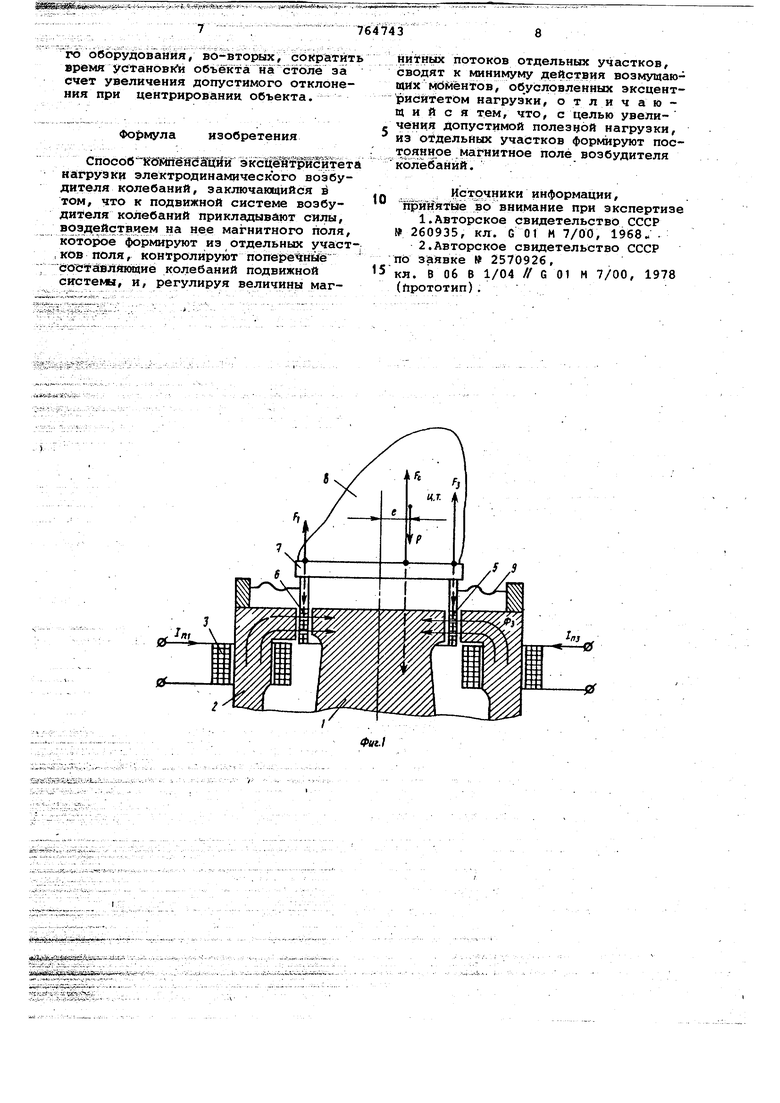
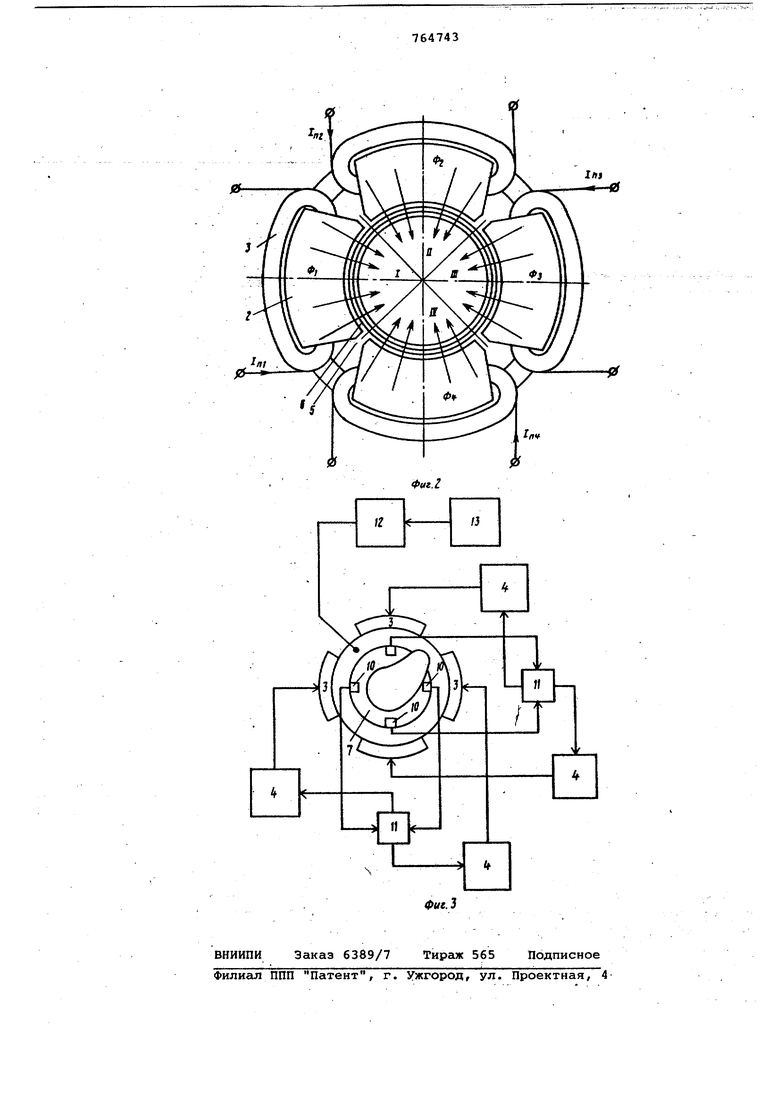
На фиг.1 изображен электродинамический возбудитель колебаний для осугчествления способа, продольный разрез;на фиг. 2 - то же, (без испытуемрго объекта и вибропреобразователей) , вид сверху; на фиг. 3 структурная схема устройства для осуществления способа.
Устройство для осуществления опиcHjB aieMCirp способа включает собственно электродинамический возбудитель коебаний, магнйтопровод которого состоит из керна 1 и наружных секторов 2, например четырех. На каяодом свкто.ре 2 размещена катушка 3 подмагниивания, связанная с собственным управляемым источником 4 питания. В кольцевом зазоре 5 магнитопровода , аспрложёйа подвижная катушка б, естко связанная со столом 7, на котором установлен испытуемый объект .Подвижная катушка б вывешена и центрирована в зазоре 5 с помощью одвески 9, например, мембранного
типа. По оси симметрии каждого сек-; тора 2 на столе 7, ближней к сектору 2 точке, установлен вибропреобразоватёль 10. Каждая пара диаметрально расположенных вибропреоб«J разователей 10 подключена к одному блоку 11 сравнения. Выходы блока 11 .сравнения подключены к-управляющим входам управляемых источников 4 тех секторов, которым соответствуют заJQ действованные вибропреобразователи 10, а выход каждого управляемого источника 4 подсоединен к катушке 3 подмагничивания соответствующего сектора 2. Подвижная катушка б запитана через усилитель 12 мощности от
5 источника 13 воспроизводимого сигнала.
Осуществляют способ следующим образом.
Магнитный поток Ф , воздействующий на подвижную катушку 6, представляет собой совокупность нескольких, например четырех, магнитных потоков Ф.{ , образуемых секторами 2, на которые разбит магннтопровод вибратора, как показано на фиг.2. Магнитный поток Фс каждого сектора определяется величиной тока I с катушки 3 подмагничивания. При прохо)вдении переменного тока по подвижной катушке б, 1аходящейся в постоянном магQ нитном поле, в ней создается переменная сила, по форме соответствующая форме протекающего переменного тока. Величина этой сш:ы определяется выражением
5F K-B-l-e , (1)
где К - постоянный коэффициент,
В - магнитная индукция в рабочем зазоре,
I - ток подвижной катушки, I - длина витка, помещенного в 0 магнитном поле.
Так как подвижная катушка представляет собой распределенную структуру, то сила F есть равнодействующая всех элементарных сил, действующих по диаметру подвижной катушки и равных Д Р К-Б-1-лЕ.. В пределах каждого из секторов равнодействующая элементарных сил равна
(2)
Fj «k-Bc-I-E
0 Де Вс - индукция в рабочем зазоре, 1с - длина проводника в пределах сектора.
Толкающую силу, создаваемую подвижной катушкой, можно представить в виде суммы сил отдельных .секторов (как показано на фиг.1),
1-1-е1 В2-1-22 ьВз-1- В41-«4-(Х
0 Точка приложения этой равнодействующей зависит от величины составляющих сил секторов 2 и, очевидно, может перемещаться при изменении отдельных сил Как следует из формулы (1), добиться изменения величины
отдельных сил можно изменением магнитной индукции , т.е. изменением магнитного потока Ф каждого сектора, прямЬ пропорционального магнитной индукции. Магнитный поток зависит от величины тока подмагничивания, поэто. му, изменяя величину протекающего по катушке. 3 подмагничивания тока в каждом секторе 2, можно изменить величину толкающей силы каждого сектора и соответственно .точку приложения равнодействующей силы. При условии/подачи одинакового тока в катушки 3 подмагничивания всех секторов 2 равнодействующая толкающая сила лежит на вертикальной оси вибратора. При установке на столе 7 объекта 8 с центром тяжести, смещенным относительно вертикальной оси, возникает возмущающий изгибающий момент. Чтобы свести его . к минимуму, следует равнодействующую толкающую силу переместить в центр тяжести. При наличии эксцентриситета нагрузки различные точки стола 7 вибратора при равенстве магнитных потоков Фс. в каждом из секторов 2 будут иметь различные амплитуды.колебаний. Снимаемые с диаметрально расположенных вибропреобразователей 10 сигналы будут иметь различную.величину, и с блока 11 сравнения к которому подключены эти вибропреобразователи 10, будет сниматься напряжение рассогласования. Это напряжение подается на управляемые источники 4, при этом изменяются токи подмагничивания в катушках 3 подмагничивания этих секторов таким образом,чтобы выровнять сигналы двух Зсщействованных вибропреобразователей 10. При изменении токов изменяются и величины толкающих сил в этих секторах. Для рассматриваемого случая в одном секторе следует уменьшить величину толкающей силы F, , а в противоположном секторе на эту же величину увеличить величину толкающей силы РЗ . В результате равнодействукяцая этих двух сил переместится в точку, лежащую на линии действия силы тяжести объекта, т.е. на вертикаль, проходящую через его центр тяжести. Аналогично автоматически выравниваются сигналы вибропреобразователей другой пары секторов . в них создаются неодинаковые толкающие силы, равнодействующая которых также лежит на вертикали, проходящей через центр тяжести объекта 8. Сумма равнодействующих пар секторов создает общую толкающую силу, линия действия которой совпадает с линией действия силы тяжести объекта.сводя таким образом к нулю действие возмущающих моментов.
В приведенном варианте устройства для осуществления способа компенсации эксцентриситета нагрузки элект764743
. б
родинамического вибратора весь маг« нитный поток в рабочем зазоре создается отдельными магнитными сектора.,ми за счет, катушек подмагничивания, намотанных на каждый сектор. Но основной магнитный поток может быть создан катушкой подмагничивания или постоянным магнитом, общими для всех секторов. В этом случае с помощью катушек 3 подмагничивания лишь изменяется величина этого по0тока в каждом из секторов, причем ;магнитный поток, создаваемый катушкой 3, может быть направлен встречно или совпадать по направлению с основным потоком.
5
Так как положение равнодействующей в плоскости стола определяется минимум тремя силами, число секторов, на которые разбивается магнитопровод вибратора, не должно быть меньше трех, в этом случае соответственно
0 уменьшается число элементов в устройстве, но сложность блока сравнения увеличивается, так как в нем должны сравниваться сигналы всех трех вибропреобразователей и сигналы
5 рассогласования должны воздействовать на три управляемых источника. Четное число секторов позволяет решить задачу более простыми средствами.
Величина толкающей силы в преде0лах каждого из секторов при постоянной амплитуде тока подвийсной катушки б ограничена степенью насыщения магнитопровода вибратора, т.е. потоком насыщения. Поэтому при. компен5сации эксцентриситета с помощью предлагаемого устройства возможно изменение суммарного магнитного потока в рабочем зазоре, а следовательно, величины равнодействующей толкающей силы подвижной катушки, т.е. изме-
0 нение воспроизводимого параметра.. В тех случаях, когда это изменение недопустимо, следует стабилизировать этот выходной параметр с помощью известных и применяемых в вибросистемах
5 систем стабилизации.
Способ применим практически для любого типа электродинамического возбудителя колебаний, но наибольший эффект достигается при его осущест0влении на большегрузных возбудителях, имеющих большую площадь стола. Применение описанного способа позволяет увеличить полезную нагрузку на столе возбудителя колебаний, который может
5 быть сделан большего диаметра, при этом такой возбудитель допускает работу при эксцентриситете нагрузки, намного превышающем допустимый в известных возбудителях.
в свою очередь увеличение допусти0мого эксцентриситета нагрузки поэво. лит, во-первых уменьшить засчет отказа от различных приспособлений для центрирования объекта на столе вибратора требуемую мощность испытательног6 Ызорудованйя, в6-1вторых, сократить время установка объекта на Ьтолё за счет увеличения допустимого отклонения при центрировании объекта.
изобретения
Формула
Способ-ТШШёйсЖдаг экйШтрШтета нагрузки электродинамического возбудителя колебаний, заключающийся и том, что к подвижной системе возбудителя колебаний прикладывают силы, воздействием на нее магнитного поля, которое формируют из отдельных участ, ков поля, контролируют попереЧнШ ео е айЛ1яющие колебаний подвижной системы, и, регулируя величины магнитных потоков отдельных участков, сводят к минимуму действия возмущающих мбйёнтов, обусловленных эксцентриситетом нагрузки, отличающийся тем, что, с целью увеличения допустимой полезной нагрузки, из о Дельных участков формируют постря(ННре магнитное поле возбудителя колебаний.
Источники информации, п йнятыё во внимание при экспертизе
1.Авторское свидетельство СССР № 260935, кл. G 01 М 7/00, 1968„ 2.Авторское свидетельство СССР по заявке 2570926, кл. В Об В 1/04 // G 01 М 7/00, 1978 (йрототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Электродинамический возбудитель колебаний | 1978 |
|
SU738686A1 |
| ЭЛЕКТРОДИНАМИЧЕСКИЙ ВИБРАТОР | 1992 |
|
RU2046029C1 |
| Электродинамический вибратор | 1977 |
|
SU730385A1 |
| Способ воспроизведения вектора вибрации и установка для его осуществления | 1985 |
|
SU1397764A1 |
| ПУЛЬСАТОР БЫСТРОПЕРЕМЕННОГО ДАВЛЕНИЯ | 2011 |
|
RU2467297C1 |
| Виброиспытательная установка | 1984 |
|
SU1270603A1 |
| ЭЛЕКТРОДИНАМИЧЕСКИЙ ВИБРАТОР | 1965 |
|
SU168031A1 |
| Устройство для определения частотных характеристик датчиков с чувствительными к динамическому воздействию элементами | 1983 |
|
SU1275221A1 |
| ЭЛЕКТРОДИНАМИЧЕСКИЙ ВИБРАТОР | 1966 |
|
SU183978A1 |
| Электродинамический возбудитель колебаний | 1975 |
|
SU777780A2 |
««Л4.&лд.г.гг:
,.
