376
дукции определяется вет1чина коэрцитивной силы Н. Для контроля индукции Вр, соответствующей рабочей точке, программное устройство воздействует на поворотный стол, испытуемый магнит выводится из намагничивающего устройства и с помощью преобразователя индукции контролируется величина рабочей индукции Вр 2.
Известное устройство обладает сравнительно низкой производительностью, так как для изме рения величины рабочей индукции В р магнит необходимо выводить из зазора намагничивающего устройства. Кроме этрго, в таком устройстве контроль В р постоянных магнитов, предназначенных для работы с арматурой, возможен лишь с невысокой точностью, определяв точностью подобия рабочей и измерительной магнитных систем.
Цель изобретения - повыщение точности.
Для достижения этой цели в состав устройства, содержащего блок перемагничивания, выходы которого через преобразователи индукции и напряженности магнитного поля магнита соединены с первыми входами стробирующих преобразователей, два нуль-органа, подключенные входами к выходам преобразователей индукции и напряженности магнитного поля, а выходами ко вторым входам стробирующих преобразователей в каналах напряженности и индукции соответственно, выходы которых под ключены через регистрирующий прибор к ч исполнительному механизму введены третий нуль-орган, подключенный вьсходом к третьим входам стробирукяцих преобразователей, блок сравнения, подключенный выходом ко входу третьего нуль-органа и одним из входов к выходу преобразователя индукции.и масштабирующий блок, включенный между выходом преобразователя напряженности машитного поля магнита и вторым входом блотса сравнения.
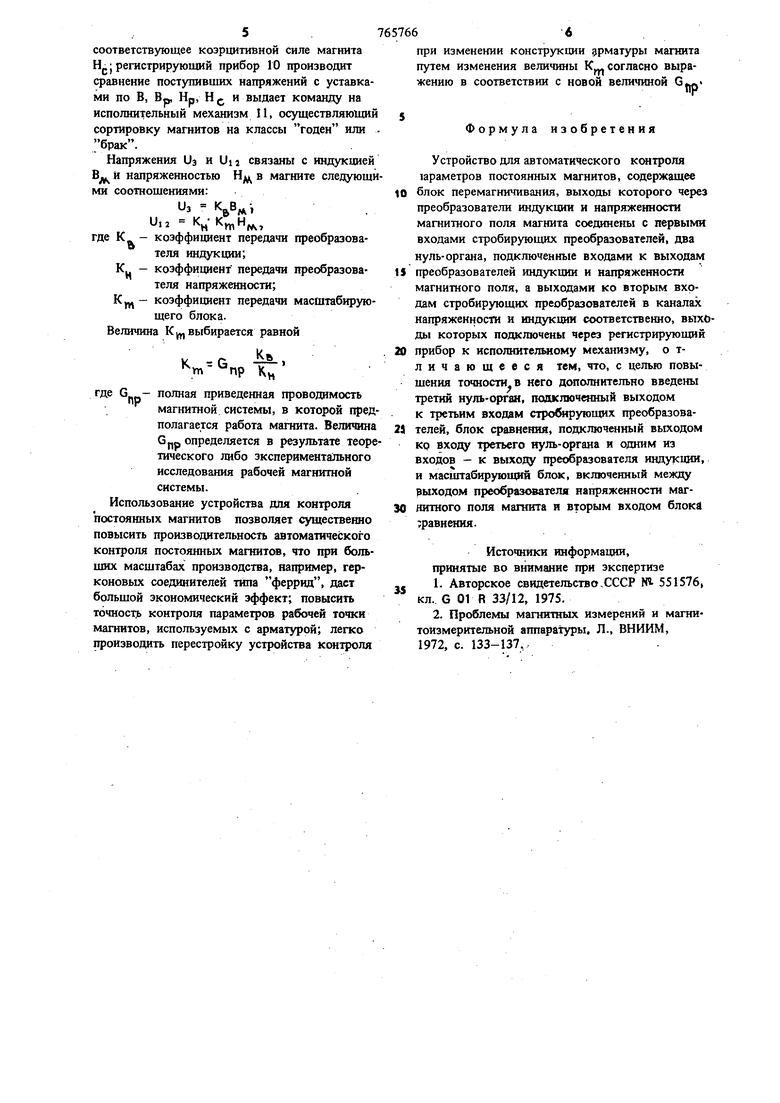
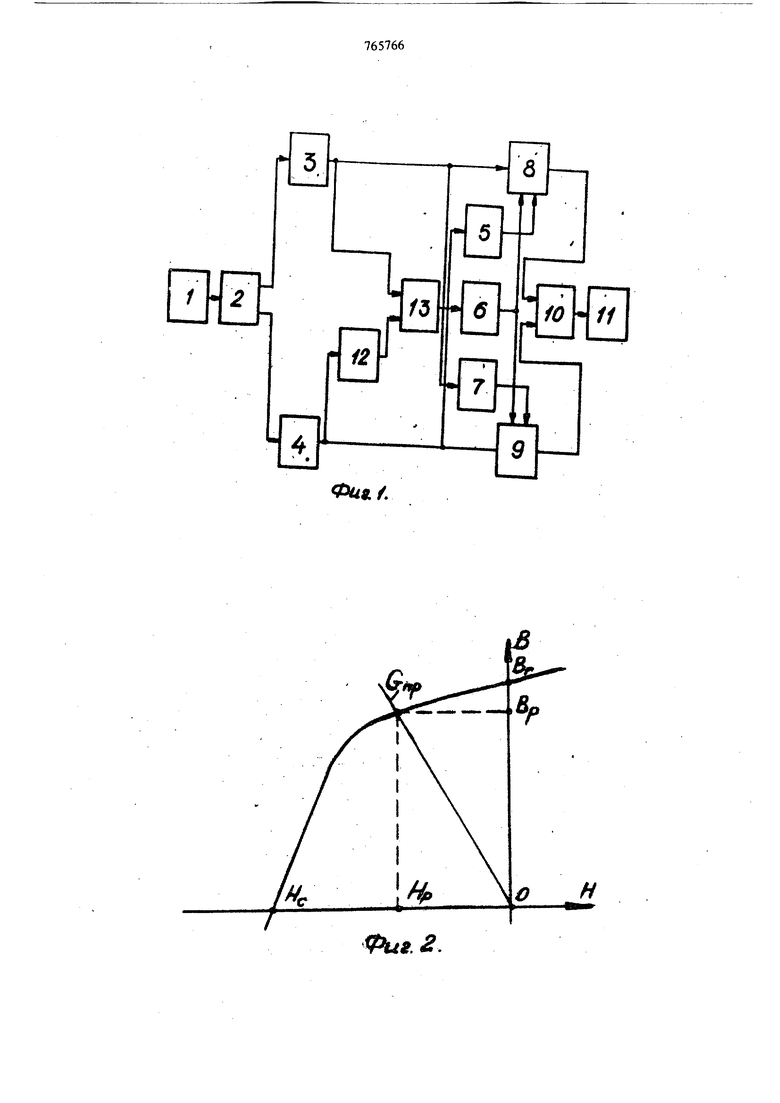
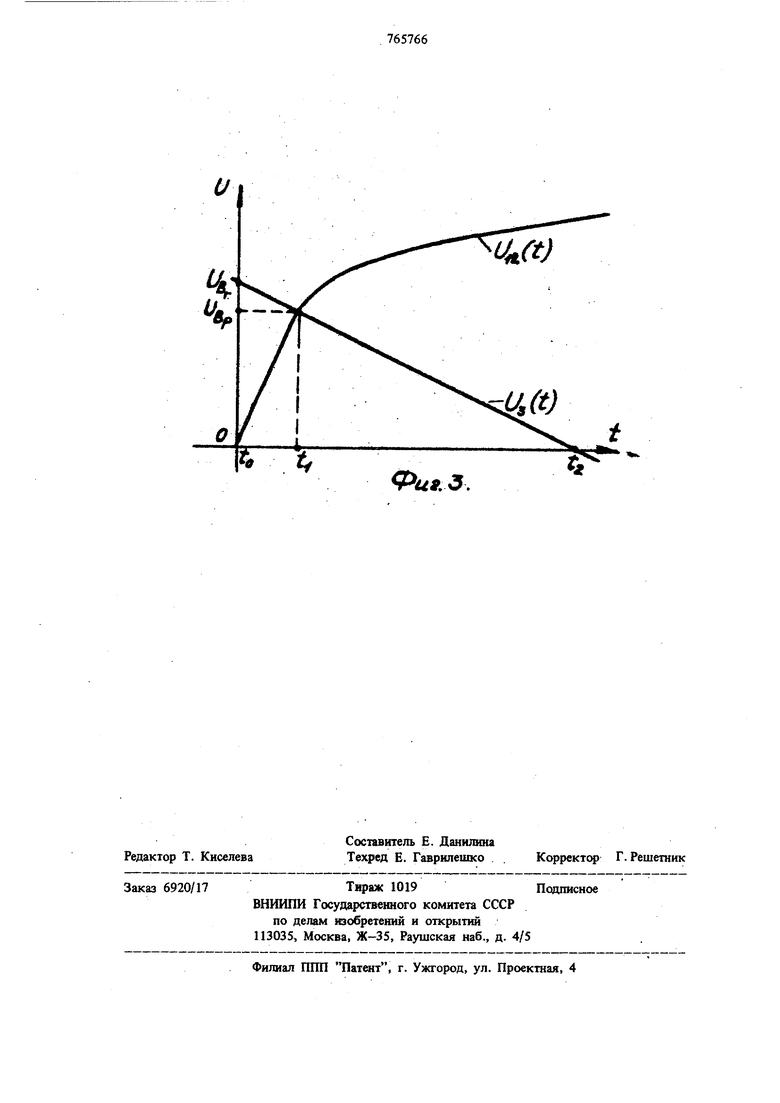
На фиг. 1 представлена структуртая схема устройства для автоматического контроля параметров постоянных магнитов; на фиг. 2 схематически изображен рабочий участок предельной петли гистерезиса постоянного магнита . н прямая, етфеделяющая положение рабочей точки магнита (Нр, Bj.) в рабочей магнитной системе, полная приведенная проводимость которой равна О,р;на фиг. 3 - эшоры изменений во времени выходного напряжения блока масштабирования Ui j (t) и сравшшаемого с ним выходного напряжение преобразователя индукции УЗ (t) в режиме перемагничивания магнита с постоянной скоростью изменения индукции в нем. (Принцип работы устройства не зависит от режима перемагничивания. Перемагничивание с постоянной скоростью изменения индукции обеспечивает минимальное время контроля).;
Устройство для автоматического контроля параметров постоянных магнитов содержит на-, магничивающее устройство 1, контролируемый постоянный магнит 2, преобразователи индукции 3 и напряженности 4 магнитного поля магнита 2, нуль-органы 5-7, стробирующие преобрзователи 8 и 9, сйгйальные входы которых соединены с выходами преобразователей 3 и 4 соответственно, один из управляющих входов стробирующего преобразователя 8 соединен с выходом нуль-органа 5, вход которого соединен с выходом преобразователя 4, второй управляющий вход стробирующего преобразователя 8 соединен с выходом нуль-органа 6, один из управляющих входов стробирующего преобразователя 9 соединен с выходом нуль-органа 7, вход которого соединен с выходом преобразователя 3, второй управляющий вход стробирующего преобразователя 9 соединен с выходом нуль-органа 6, выходы стробирующих преобразователей 8 и 9 соединены с соответствующими входами регистрирующего прибора 10, выход которого соединен со входом исполнительного механизма 11. Кроме того устройство содержит масштабирующий блок 12 и блок 13 сравнения, выход которой соединен с входом нуль-органа 6, один из входов схемы 13 соединен с выходом преобразователя
3индукции, а другой ее вход соединен с выходом блока 12, вход которого соединен с выходом преобразователя напряженности 4.
Устройство работает следующим образом.
С помощью перемагничивающего устройства магнит 2 насыщается, а затем плавно перемагничивается. В некоторый момент времени напряженность Н j в магните, а значит напряжение на выходе преобразователя напряженности
4и.напряж ие 12 на выходе масщтабирующего блока 12 становятся равными нулю (момент . 3); срабатывает нуль-орган 5, сигнал с его выхода воздействует на стробирующий преобразователь 8 и напряжение на выходе преобразователя 3 индукции, соответствующее остаточной индукции В (фиг. 2), регистрируется npwSapoM 10. При дальнейшем перемагничивании в момент t (фиг. 3) напряжения Uj и Ui2 сргшниваются в блоке 13 сравнения, срабатывает нуль-орган 6, воздействующий на стробируюцдае преобразователи 8
и 9 и в регистрирующий прибор 10 поступают значения напряжений с выхода преобразователя 3 индукции и напряженности 4 магнитного поля, соответствуюище координатам рабочей точки Вр и Нр. В -момент tj становится равным нулю напряжение Us, а значит и индукция в магните R., сработает нуль-орган 7 и на вход регистрирующего прибора 10 с выхода преобразователя 4 напряженности через стробирующий преобразователь 9 поступит напряжение соответствующее коэрцитивной силе магнита Нр j регистрирующий прибор ГО производит сравнение поступивших напряжений с уставками по В, Вр Нр, Н и выдает команду на исполнительный механизм И, осуществляющий сортировку магнитов на классы годен или брак. Напряжения Us и Uu связаны с индукцией Вд И напряженностью H в магните следующ ми соотнощенкями: из и,2 к„-к m(A7 где К - коэффициент передачи преобразователя индукции; Кц - коэффициент передачи преобразователя напряженности; Kj - коэффициент передачи масштабирую щего блока. Величина К j, выбирается равной V - г -iiSL, KH где G - полная приведенная проводимость магнитной системы, в которой пред полагается работа магнита. Величина Gpp определяется в результате теоре тического либо экспериментального исследования рабочей магнитной системы. Использование устройства для контроля постоянных магнитов позволяет существенно повысить производительность автоматического контроля постоянных мапштскв, что при больших масштабах пронзводства, например, герконовых соединителей типа феррид, даст большой экоиомический эффект; повысить точность контроля параметров рабочей точки магнитов, используемых с арматурой; легко производать перестройку устройства контроля -6 при изменении конструкции арматуры магнита путем изменения величины К„ согласно выражению в соответствии с новой величиной G Формула изобретения Устройство для автоматического контроля 1араметров постоянных магнитов, содержащее блок перемагничивания, выходы которого через преобразователи индукции и напряженности магнитного поля магнита соединены с первыми входами стробирующих преобразователей, два нуль-органа, подключенные входами к выходам преобразователей индукшт и напряженности магнитного поля, а выходами ко вторым входам стробирующих преобразователей в каналах напряженности и индукции (хютветственно, выхйды которых подасяючены через регистрирующий прибор к исполнителшому мехшшзму, о тличающееся тем, что, с целью повышения точности в него дополнительно введены третий нуль-орган, под1слючеш1ый выходом к третьим входам стро(й рующих преобразователей, блок сравнения, подключенный выходом KQ входу третьего нуль-органа и одним из входов - к выходу преобразователя индукции, и масштабирующий блок, включенный между эыходом преобразователя напряженностн магяитного поля магнита и вторым входом блока уравнения. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство .СССР № 551576, кл. G 01 R 33/12, 1975. 2. Проблемы магнитных измерений и магиитоизмерительной аппаратуры. Л., ВНИИМ, 1972, с. 133-137,

| название | год | авторы | номер документа |
|---|---|---|---|
| Аналоговое измерительное устройство | 1987 |
|
SU1465847A1 |
| Измерительный комплекс | 1988 |
|
SU1582156A1 |
| Устройство для контроля параметров ферромагнитных материалов | 1982 |
|
SU1053028A1 |
| Устройство для определения характеристик гистерезисного электропривода | 1984 |
|
SU1251276A1 |
| ВНУТРИТРУБНЫЙ ДЕФЕКТОСКОП | 2010 |
|
RU2439548C1 |
| Устройство для регистрации магнитных параметров и характеристик магнитнотвердых материалов | 1977 |
|
SU648923A1 |
| Устройство контроля сердечников для накопительных магнитных усилителей | 1981 |
|
SU1000955A1 |
| Устройство для измерения магнитных характеристик ферросердечников | 1983 |
|
SU1128209A1 |
| Устройство для измерения коэрцитивной силы магнитных материалов | 1981 |
|
SU953607A1 |
| Устройство для измерения остаточной магнитной индукции постоянных магнитов | 1980 |
|
SU947797A1 |
Фиг. 2.
