Изобретение относится к мнргока- . нальным электронным регуляторам, используемым в различных отраслях про.мышленности при- автоматизации много- 5 связных объектов.
По основному авт. св. № 565283 известен многоканальный импульсный регулятор, содержаидий датчики параметра, нуль орган, которого ключены к источнику эталонного сигнала и-генератору развертывающего сиг-нала, а выход через вентиль, второй вход которого соединен с генератором тактовых импульсов, подсоединен к . 5 счетчику, блоки формирования регули- / рующих воздействий, три инвертора .и пять схем сравнения, выход -первой из которых непосредственно через второй и третий инверторы соединены с соот- 20 ветствующими входами блоков формирования регулирующих воздействий, а парсшлельные входы схем сравнения подключены к соответствующим выходам счетчика.25
Блок формирования регулирукяцих воздействий содержит два триггера, шесть элементов И, четыре элемента задержки, два элемента ИЛИ, инвертор и схему сравнения, выход которой
ключен через инвертор к первым входам первого, трётьего и ПЯТОГО элементов И, и непосредственно к первым входам четвертого и шестого элементов И, выходы первого и второго элемен тов И соединены с входам первого триггера, первый выход которого подключен к первому входу первого элемента ИЛИ и через первый элемент задержки - к второму входу первого элемента И, второй выход подключен к второму входу пятого элемента И и через второй элемент: задержки - к второму входу второго элемента И, выходы . третьего и четвертого элементов И соединены с входами триггера, первый выход которого подключен к второму входу шестого элемента И и через третий элемент задержки - к второму входу третьего элемента И, второй выход подключен, к первому входу второго элемента ИЛИ и через четвертый элемент задержки - к второму входу четвертого элемента И, вторые входы первого и второго элементов ИЛИ соединены с выходами соответственно пятого и шестого элементов И .
Недостатком данного регулятора яв.ляется то, что он не позволяет осу n cfSWst iti ограничо.1Йё числа управля ощих воздействий в системе, что приводит к задействованию большого числа исгюлнительнБос MexaHiHfSMipB И следовательно к увеличению потребляемой мощности, что ухудшает энергетические характеристики регулятора.
Целью дополнительного изобретения
я-вляется улучшение энергетических ха рат теристик регулятора.
ГГбставлённая цель достигается тем, что в регуУ1Ят&р Введены первые последоватёльнсЗсоединенные сумматор и пороговый элемент и вторые последовательно соединенные сумматор ипороговый ЙШмёнт, причем входы первогS H™ffToporo сумматоров подключены
с&о1РМтдтйённо к выходам первых и Йторых триггеров, а выходы первого,
й зт5р 5гбп:6р1бговых элементов соедийёнй соответственно со входами первых и четвертых элементов И в соответствуюадих блоках формирования регулирующих воздействий.
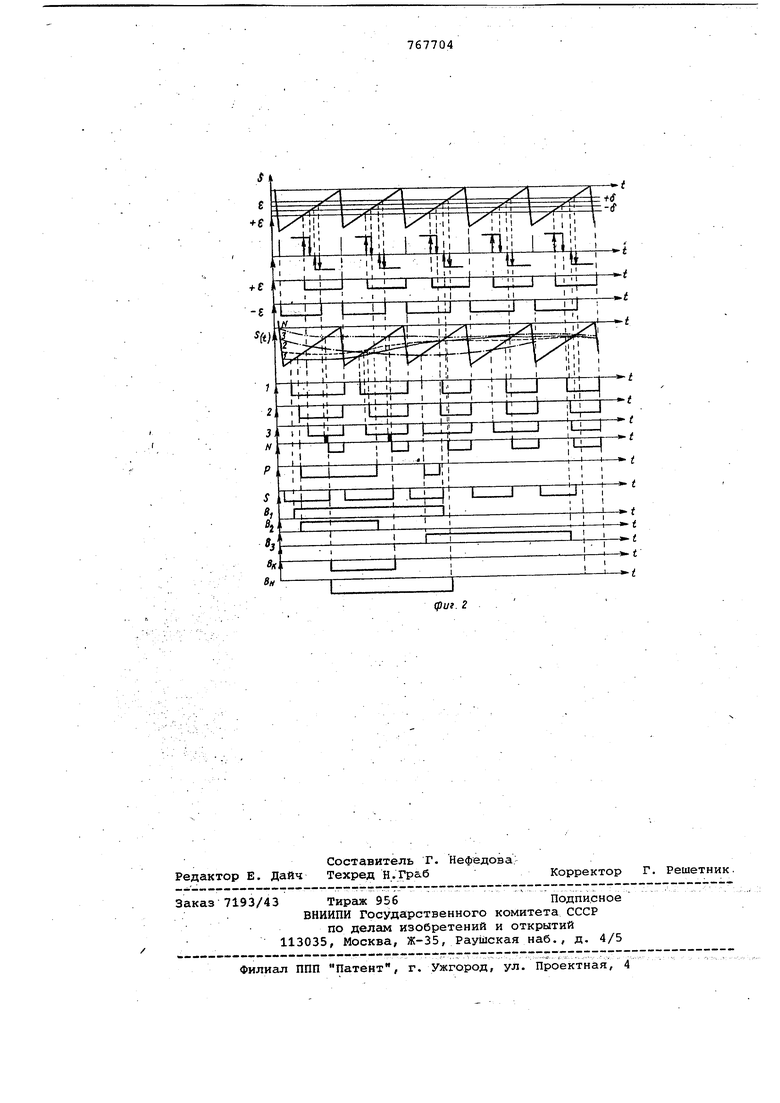
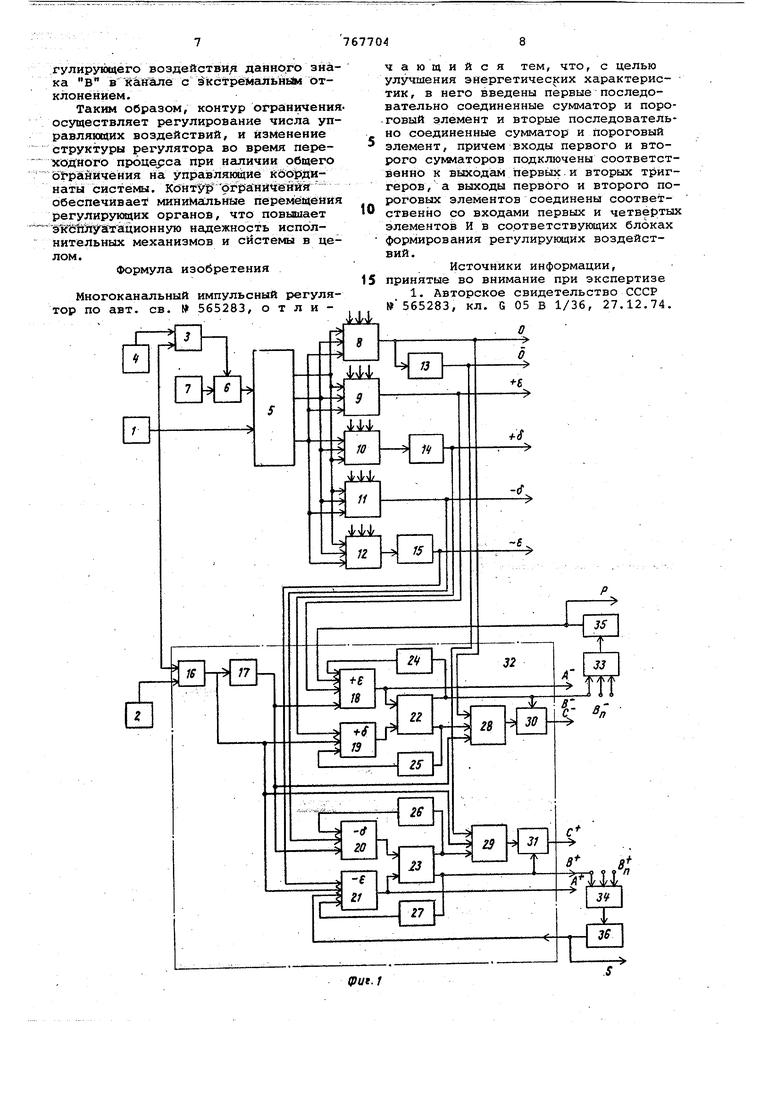
На фиг.- 1 показана схема регулятора; на.фиг. 2 - временные диаграммы
поясняющие принцип работы регулятора.
Регулятор содержит генератор 1 развёрстывающего сигнала, датчики 2 параметра, нуль-орган 3, источник 4 эталонного сигнала, счетчик 5, вентиль 6, генератор 7 тактовшс импульсов, схемы 8-12 сравнения кодов, инверторы 13-15, схему срайнения 16, Ьянвертор 17, элементы И 18-21, триггеры 22 и 23, элементы задержки 2427, элементы И 28 и 29, элементы ИЛИ 30 и 31, блок 32 формирования регули рующих воздействий, сумматоры 33 и 34, пороговые элементы 35 и 36. Чис11й йходов сумматоров равно числу каналов. Входы сумматоров 33 и 34 подалючёны к соответствующим выходам В и в блоков 32 формирования регулируйщих воздействий. Выходы пороговых элементов 35 и 36 соединены по шина.м Р и S с четвертыми входами элементов И 18 и 21 всех блоков 32 формирования регулирующих воздействий.
Алгоритм раббтй регулятора основан йа методе динамической компенсации, который предусматривает преобразование амплитуд., сигналов датчиков и длительность временного интервала путем cpaBjjgHHH их абсолютных значений у , X 2. .. ,., с раз вёртыва {Здйм Сигналом S(t). При линейной, развертывающей
функции „
, S(t) ctt(1)
ийтёрвалывремени динамической ком- пенсации сигналов прямопропорциональны сигналам датчиков
А
(2)
,х
tf, -т
d. ot
аразность между интервалом времени t; и рёперным интервалом t, прямо пропорциональна отклонению ,
(X, - А) f (3)
Ч Ч
Ч
ПрёббразУй входные сигналы х и эталонный сигнал А в длительности временных интервалов и сравнивая их мезкду собой получаем регулирующие в6здёйствййё соответствии с характеристикой двухпозиционного реле, а. 5 при заданий зоны нечувствит;ельности и терхпозиционного реле
+и при t to
W
- -и при t- i to
Момент формирования регулирующего воздействий рднйзначно связан с величиной отклонения в канале, что по зволяег в процессе развертывающего JJ5 ХФавновешивания одновременно с вы.чис.пением отклонений выделить заданг ное число К отклонений соответстВующего знака в порядке их убывания по амплитуде.
Алгоритм работы предложенного многоканального регулятора обеспечивает ограничение числа регулирующих воздействий путем выделения заданного .числа К отклонений в порядке их убывания по амплитуде и формирование 25 управляющих воздействий в соответствий со следующим логическим законом.
Y ZV ,(5)
где V - переключающая функция, описывающая характеристику реле, наприме э
и. Y ve
о, -е. (6)
VJ L-U, у; -е
Z - переключающая функция ограничения каналов регулирования,- описываемая соотношением:
N
(7) 2 1, при Е v; с k
bf
z О, при
i
1 1
45 в исходном Состоянии развертывающий сигнал S(t) с выхода генератора 1 заведомо возможных значений сигналов датчиков 2.
Сигналы с выходов нуль-органа 3 и
50 схемы сравнения 16 отсутствуют; с ге нератора 7 нё прЪ:й:С) на счетчик 5. На выходах схем сравнения 8, 9 10, 11 и 12 действует логический ноль а на выходах инверторов 13, 14 и 15 -
55 логическая единица.
На третьих входах элементовИ 18, 19,, 20, 21 и 21 действует логический ноль, но на первых входах второго и четвертого элементов И, а также на вторых входах nejpBoro и третьего менментрв И действует сигнал 1. На порогового элемента 35 действует логический нуль, который проходит по шине Р на четвертый вход первого элемента И 18 а на выходе пОро65 гового элемента 36 действует сигнал 1 который по шине S проходит на четвертый вход четвертого элемента И 21 в каждый блок формирования регулирующих воздействий. На выходах элементов И 18, 19, 20 и 21 работающ на совпадение логических нулей, сигналы отсутствуют. На выходах триггеров 22, 23 элементов И 28, 29 и элементов ИЛИ 30, 31 блока формирова ния регулирующих воздействий сигналы также отсутствуют. В процессе изменения развертывающего сигнала по закону S(t) C-o6t в моменты равенства езго со значениями сигналов датчиков срабатывают соответствующие схемы сравнения 16. Причем в первую очередь срабатывает схема сравнения в канале с максималь ным отклонением, и йа ее выходе устанавливается логическая единица, а на выходе подключенного к ней инвертора 17 - логический ноль. В этот момент в канале с максимальным положительным рассогласованием происходит совпадение логических нулей на входах элемента И 18. На выходе элемента И 18 появляется сигнал, который переводит триггер 22 в рабочее состояние и формирует регулирующее «воздействие Hai исполнительный механизм по шине В. Аналогично происходит формирование регулирующих воздействий в других каналах с положительными отклоне ниями в порядке их убывания по ампли туде. При этом сигналы стриггеров 22 суммируются на сумматоре 33. При формировании Зсщанного числа регулир ющих воздействий К сигнал на выходе сумматора 33 достигает порогового значения, при котором срабатывает по роговый элемент 35. На выходепорогового элемента 35 появляется сигнал 1 который по шине . Р проходит на четвёртые входы элементовИ 18 во всех каналах. Этот сигнал запрещает формирование регулирующих воздействий в остальных каналах с положитель ными отклонениями. На фиг. 2 приведе ны диаграммы для случая включения двух.каналов. При дальнейшем изменении разверты вающего напряжения в момент равенства его эталонному сигналу источника срабатывает нуль-орган 3, который от крывает вентиль 6, счетчик 5 начинае заполняться тактовыми импульсами час тотой fo . В процессе заполнения счет чика срабатывают схемы сравнения 8, 9, 10, 11 и 12 в моменты, когда код счетчика совпадает с кодом, установленным на входе соответствующей схемы сравнения, и формируют реперные временные интервалы , , t° , t, которые задают во времени границы срабатывания и отпускания. Реперные временные интервалы срав ниваются на входах элементов И 18, 19, 20, и 21 с соответствунвдими сиг налами, поступаю1иими со схем сравнения 16. Если сигнал датчика в зоне не- , чувствительности и интервал t то в момент срабатывания схемы сравнения 16 по шине + действует сигнал 1 и импульс управления не формируется элементом И 18. При этом на входах элемента И 19 в момент прихода сигнала О по шине Ч8 действует сигнал О со схемы сравнения 16, что приводит к формированию импульса сброса триггера 22 в исходное состояние. Одновременно срабатывает элемент И, 20, который формирует импульс сброса на триггер 23. В каналах с отрицательным отклонением интервал со схем сравнения 16 больше реперного интервала границы срабатывания и в момент прихода сигнала О по шине - на выходе схемы сравнения 16 действует сигнал О. Но в регуляторе с контуром приоритета на четвертых входах элементов 21 действет сигнал 1 по шине S, поэтому элементы И срабатывают. В процессе развертывающего уравновешивания срабатывают схемы сравнения 16 и на их выходах формируются сигналы 1, которые суммируются сумматором 34. При срабатывании N-k схем сравнения 16 сигнал на выходе сумматора 34 равен пороговому уровню, при котором срабатывает пороговый элемент 36. На выходе порогового элемента 36 формируется сигнал О, который по шине S проходит на четвертые входы элементов И 21. В этот момент только в k каналах с наибольшим по амплитуде отрицательным отклонениями действует сигнал О на выходах схем сравнения 16. В этих каналах срабатывают элементы И 21, которые формируют.импульсы уравнения на триггеры 23. В каналах с отрицательными бткЛбнбн 1Ями формируются положительные управляющие воздейт ствия на шины В. Таким образом, за цикл развертки в процессе преобразования сигналов датчиков во временной интервал осуществляется выделение k каналов с наибольшими отклонениями обоих знаков и формирование управляющих воздействий в соответствии с описанным алгоритмом. После отработки рассогла сования в каком-либо из каналов (канал 2 на фиг. 2) в нем формируется сигнал на- выходе соответствующего элемента И 19 (или 20), триггер 22 (или 23) возвращается в исходное состояние и управляющий сигнал исчезает. При этом сигнал на выходе сумматора 33 (или 34) уменьшается, пороговый элемент 35 (или 36) возвращается в исходное состояние и на выходе шины Р или S появляется сигнал, который разрешает формирование в последующем такте регулирующего воздействи/i данного знака В в кЙнЖлё с Экстремальным Отклонением.
Таким образом, контур ограниченияосуществляет регулирование числа управляющих воздействий, и изменение структуры регулятора во время переходного процесса при наличии: общего ограничения На управлякЙ1йё кбординаты системы. КОЯТН Ог-ранй &нйя обеспечивает минимальные перемещения регулирукядих органов, что повьвиает э1ШйЙу1аЕтационную надежность исполнительных механизмов и системы в целом.
Формула изобретения
Многоканальный импульсный регулятор по авт. св. 565283,
чающийся тем, что, с целью улучшения энергетичес1сих характеристик, в него введены первые последовательно соединенные сумматор и пороговый элемент и вторые последовательно соединенные сумматор и Пороговый элемент, причем входы первого и второго сукматоров подключены соответственно к выходам первых.и вторых триггеров, а выходы первого и второго пороговых элементов соединены соответственно со входами первых и четвертых элементов Ив соответствующих блоках формирования регулирующих воздействий.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР
| название | год | авторы | номер документа |
|---|---|---|---|
| Многоканальный импульсный регулятор | 1974 |
|
SU565283A1 |
| МНОГОЗОННЫЙ ИНТЕГРИРУЮЩИЙ РЕГУЛЯТОР ПЕРЕМЕННОГО НАПРЯЖЕНИЯ | 2011 |
|
RU2471282C1 |
| Электронно-лучевой осциллограф | 1987 |
|
SU1442922A1 |
| Устройство автоматического согласования и контроля режимов многоступенчатых насосных и гидротранспортных установок | 1982 |
|
SU1079568A1 |
| СПОСОБ УПРАВЛЕНИЯ НАГРЕВОМ МЕТАЛЛА В ПЛАМЕННОЙ НАГРЕВАТЕЛЬНОЙ ПЕЧИ | 1994 |
|
RU2068006C1 |
| Устройство для форсировки возбуждения синхронных машин | 1982 |
|
SU1107245A1 |
| Система регулирования уровня воды на канале | 1990 |
|
SU1837263A1 |
| МНОГОЗОННЫЙ ЧАСТОТНО-ШИРОТНО-ИМПУЛЬСНЫЙ РЕГУЛЯТОР ПЕРЕМЕННОГО НАПРЯЖЕНИЯ | 2011 |
|
RU2461875C1 |
| Многоканальный регулятор | 1986 |
|
SU1388840A1 |
| Устройство для отображения информации | 1982 |
|
SU1045251A1 |