также приводит к значительному сиг- . нашу небаланса на выходе фильтра.
Цель изобретения - повышение точности фильтрации при несимметричных режимах и качаниях.
Это достигается тем, что в устройство для выделения аварийной составляющей, содержащее входной трехфазный сумматор, подключенный входом к датчику контролируемого сигнала, блок расчета поправок, два выхода которого подключены через интеграторы к двум входам трехфазного генератора синусоидальных колебаний, выход которого подключен к инвертированному входу указанного сумматора и первому дополнительному входу блока расчета поправок, блок коррекции частоты, включенный между выходом одного из интеграторов и третьим входом генератора синусоидальных колебаний, причем выход другого интегратора лодключен ко второму дополнительному входу блока расчета поправок, дополнительно введены фильтр прямой последовательности и трехфазная модель мгновенных значений аварийной составляющей , включенная между выходом упомянутого сумматора и его дополнительным инвертированным входом, причем фильтр прямой последовательности подключен между выходом сумматора и основным входом указанного блока расчета поправок, а выход пускового органа подключен также ко второму входу модели мгновенных значений аварийной составляющей.
При этом блок коррекции частоты содержит последовательно соединенные входное пропорциональное звено и выходной сумматор, второй вход которого подключен к источнику постоянного сигнала.
Блок расчета поправок содержит четыре входных множителя, образующих две пары, причем первые входы множителей каждой пары объединены и подключены к основному входу блока расчета поправок, вторые входы двух множителей разных пар подключены непосредственно, а двух других через фазоврсццатель - .к первому дополнительному входу блока расчета поправок, а выходы двух множителей разных пар попарно подключены к выходным сумматорам, причем на выходе одного из указанных сумматоров включен блок деления , второй вход которого подключен ко второму дополнительному входу блока расчета поправок, при этом на выходе блока деления и сумматора включены ключи, управляющие входы которых подключены к третьему дополнительному входу блока расчета поправок.
Кроме того, трехфазная модель мгновенных значений аварийной составляющей содержит в каждой фазе два основных.множителя, первые входы которых подключены к входному сумматору.
второй вход одного множителя непосредственно, а другого через фазовращатель подключен к выходу генератора периодических колебаний промышленной частоты, а выходы множителей через е фильтры нижних частот - к интеграторам, два дополнительных множителя, один вход каждого из которых подключен к выходу соответствующего интегратора, другой - ко второму входу соответствующего основного множителя, а выходы - к двум входам дополнительного сумматора, выход которого подключен к инвертированному входу упомянутого входного сумматора и выходу модели мгновенных значе5 НИИ аварийной составляющей, причем на входе входного сумматора включен ключ, управляющий вход которого подключен ко второму входу модели мгновенных значений аварийной составляющей.
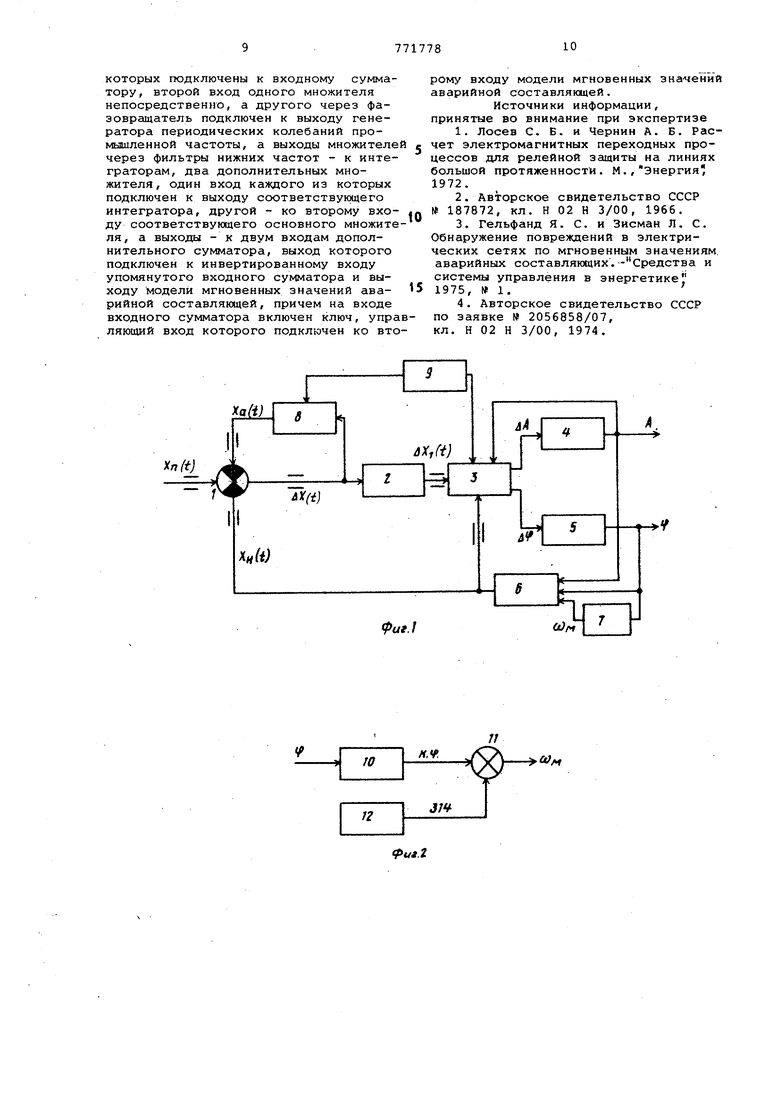
На фиг. 1 представлена функциональная схема предлагаемого устройства j на фиг. 2 - блок коррекции частоты; на фиг. 3 - блок расчета по5 правок; на фиг. 4 - модель мгновенных значений аварийной составляющей.
Устройство содержит (см. фиг.1.) входной трехфазный сумматор 1, подключенный через фильтр 2 прямой последовательности (ФПП) к блоку З расчета поправок, два выхода которого через интеграторы 4 и 5 связаны с трехфазным генератором 6 синусоидальных колебаний (ГСК), образуя контур коррекции нагрузочного режима. Вход генератора б подключен также к выходу блока 7 коррекции частоты. Выход генератора 6 подключен к инвертированному входу сумматора 1 и блока 3 расчета поправок. Модель 8 мгновенных значений аварийной составляющей включена между выходом сумматора 1 и его инвертированным входом. Выходы пускового органа 9 (по) релейной защиты подключены к модели 8 мгновенных значений ава-рийной составляющей и блоку 3 расчета поправок.
Блок 7 коррекции частоты (см.фиг.2) содержит пропорциональное звено 10, сумматор 11.и источник 12 постоянного сигнала.
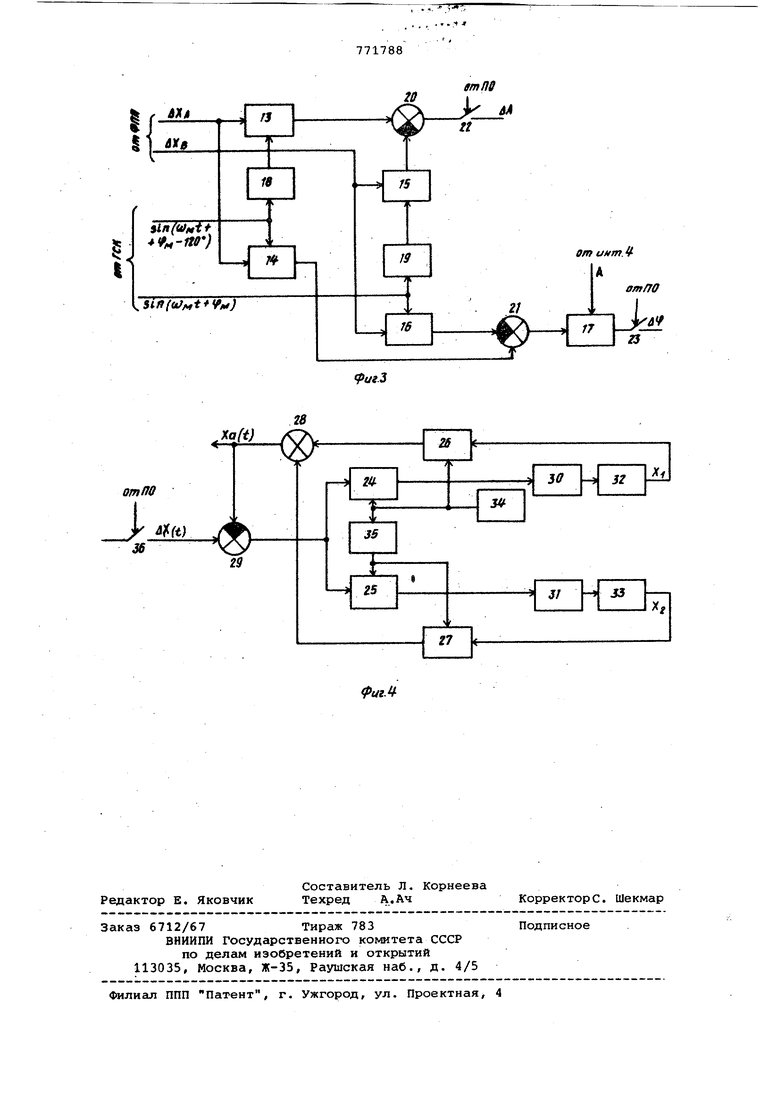
Блок 3 расчета поправок (см.фиг.З) содержит четыре множителя 13 - 16 и блок деления 17, два фазовращателя 18 и 19 и два сумматора 20 и 21.
На выходе блока 3 расчета поправок включены ключи 22 и 23, управляемые пусковым органом 9. В нагрузочном режиме ключи 22 и 23 закрыты .
Модель 8 мгновенных значений аварийной составляющей (см. фиг. 4) содержит четыре множителя 24-27, два сумматора 28 и 29, два фильтра 30 и 31 нижних частот, два интегратора 32 и 33, генератор 34 синусоидальных колебаний, фазовращатель 35 на 90 и ключ 36. в модели 8 аварийного режима может использоваться как автономный генератор 34 (в этом случае он может генерировать и несинусоидальные сигналы), так и генератор 6, установленный на выходе интеграторов, который может быть выполнен однофазным и дополнен (1 азовращателем на + 120 и на -120 для получения трехфазного сигнала на выходе. Ключ 36 кратковременно (на время, определяемое переходным процессом в модели 8) замыкается при возникновении повреждения.
Устройство работает следующим образом.
В неизмененном нагрузочном режиме (амплитуда и фаза входного сигнала тока или напряжения, неизменна) мгновенные значения входной величины для любого момента времени равны соответствуквдим величинам на выходе генератора 6 синусоидальных колебаний, а сигнал на выходе модели 8 равен нулю. Величины на выходе сумматора 1 равны нулю. Поправки на выходе блока 3 расчета поправок также равны нулю. Сигналы на выходе интеграторов 4 и 5 неизменны. Устройство находится в статическом состоянии. При изменениях нагрузочного режима, например, в результате качаний или асинхронног хода, имеют место изменение во времени амплитуды и фазы входного сигнала Возможная несимметрия в фазных величинах устраняется фильтром 2 прямой последовательности, включенном на вх де блока 3 расчета поправок.
С постоянной интегрирования, задаваемой интеграторами 4 и 5, значения поправок отслеживаются до обнуления сигнала, после чего генератор 6 моделирует величину, соответствующую новому нагрузочному режиму.
Отклонение частоты нагрузочного режима от частоты генерируемого сигнала приводит к разности фаз замеряемого и моделируемого сигналов и к поправке по фазе, отличной от нуля Фаза генерируемого сигнала изменяется, что в свою очередь приводит к изменению сигнала, пропорционального частоте моделируемого сигнала на вхо де блока 7 коррекции частоты(см.фиг. до равенства частот моделируемого и измеряемого сигналов. Таким образом, плавные во времени, а также скачкообразные, не превышающие определенной величины, изменения нагрузочного режима, обусловленные качаниями и коммутацией нагрузки, отслеживаются интеграторами 4 и 5, а генератор 6 подстраивается под новый нагрузочный ре жим. Небаланс на выходе фильтра аварной составляющей незначителен и появется кратковременно.
Возникновение повреждения в защищмоей сети характеризуется резким и
существенным изменением входной величины, что приводит к появлению отлного от нуля сигнала рассогласования который подается на вход модели 8 Входной сигнс1Л модели 8, содержащий синусоидальную составляющую промышленной частоты, умножается в множителях 24 и 25 на синусоидальный сигнал той же частоты. В результате, на входе фильтров 30 и 31 (см. фиг. 4) появляются сигналы, содержащие постоянную составляющую, пропорциональные проекциям амплитуды составляющей промьпиленной частоты входного сигнала модели 8. Гармонические Составляющие помехи фильтруются фильтрами 30 и 31. Причем, если входной сигнал содержит только составляющую промышленной частоты, то на выходе множителей 24 и 25 составляющие помехи двойной частоты. Отфильтрованные постоянные сигналы поступают на интеграторы 32 и 33, выполняющие роль запоминающих элементов, и с них на множители 26 - 27 в цепи отрицательной обратной связи. После сумматора 28 на выходе модели 8 имеем синусоидальный сигнал, соответствующий аварийной составляющей входного сигнала. Аварийная составляющая вычитается (см. фиг. 1) из полного входного сигнсша. В установившемся режиме сигналы на входе модели 8 и генератора 6 уравновешивают полный входной сигнал, а сигнал рассогласования равен нулю. В модели 8 имеются как мгновенные значения аварийной составляющей, так и постоянные сигналы, пропорциональные проекциям амплитуды аварийной составляющей в ортогональной системе координат. Последние, как правило, более целесообразно использовать в дальнейшем в измерительном органе защиты для определения вида и места повреждения .
Если режим повреждения в защищаемой системе сопровождается качаниями, то фаза и амплитуда синусоидального сигнала на входе плавно изменяется со скоростью, определяемой периодом качаний.
Эти изменения отслеживаются с помощью блока 3 расчета поправок и генератора 6 синусоидальных колебаний, аналогично тому, как это делается при качаниях в нагрузочном режиме.
ч
Быстродействие модели 8 существенно больше, чем быстродействие контур коррекции .нагрузочного режима, определяемого постоянными времени интегрторов 4 и 5 в цепи генератора 6. В связи с зтим изменения, связанные с возникновением повреждения, будут отслежены и ::афиксированы в модели 8. Однако изменения, связанные с изменением нагрузочного режима, также
.могут быть отслежены раньше в модели 8, чем в контуре коррекции нагрузочного режима. В связи с этим работа модели 8 должна быть заблокирована в нагрузочном режиме работы защищаемой сети и деблокирована при возникновении .повреждения на период появления установившихся значений на выходе модели 8. Эта операция выполняется пусковым органом 9 релейной защиты, входящим в состав системы релейной защиты. Своими выходными цепями пусковой орган 9 разрывает цепь на входе модели 6 в нагрузочном режиме и замыкает ее на время, определяемое появлением установившегося режима на выходе модели 8. В случае необходимоти он может также разрывать на этот период цепь коррекции нагрузочного режима. При необходимости пусковой орган 9 может также возвращать в начальное состояние модель -8 (обнулять выход ее интеграторов) и контур коррекции нагрузочного режима (задавать начальные значения амплитуды и фазы. на входе генератора 6) после отключения повреждения или через заданное время после запуска модели 8.
Кроме прямого назначения - фильтрции аварийной составляющей, устройство позволяет контролировать параметры нагрузочного режима (амплитуда, фаза и частота), а также позволяет отстроиться от гармонических помех, например электромагнитного переходного процесса, и выдает информацию об аварийной составляющей в виде постоянных сигналов, что существенно упрощает последующий анализ повреждения в измерительных органах защиты.
Таким образом, предложенное устройство, являясь многоцелевым, обладет способностью подстройки под качания как при отсутствии повреждений в контролируемой сети, так и при их наличии, что повышает точность фильтрации в указанных режимах. Кроме того, в несимметричных режимах точность повышается за счет создания системы симметричных величин на входе блока 3 расчета поправок фильтром 2 прямой последовательности.
Использование описываемого устройства как элемента системы релейной защиты позволяет применять более чувствительные к возникновению повредения измерительные органы защиты и, как следствие, повысить надежность отключения поврежденного элемента энергосистемы.
Для использования в защите одного присоединения необходима установка двух комплектов устройства для тока и напряжения.
Формула изобретения 1. Устройство длявыделения авари ной составляющей электрической величины при повреждении в сети переменного тока, содержащее входной трехфазный сумматор, подключенный входом к датчику контролируемого сигнала, блок расчета поправок, два выхода которого подключены через интеграторы к двум входам трехфазного генератора синусоидальных колебаний, выход которого подключен к инвертированному входу указанного сумматора и первому дополнительному входу блока расчета поправок, блок коррекции частоты, включенный между выходом одго из интеграторов и третьим входом генератора синусоидальных колебаний, причем выход другого интегратора подключен ко второму дополнительному входу блока расчета поправок, о тличающееся тем, что, с целью повышения точности при несимметричных режимах и качаниях, дополнительно введены фильтр прямой последовательности и трехфазная модель мгновенных значений аварийной составляющей, включенная между выходом упомянутого сумматора и его дополнительным инвертированным входом, причем фильтр прямой последовательности подключен между выходом сумматора и основным входом указанного блока расчета поправок, а выход пускового органа подключен также ко второму входу модели мгновенных значений аварийной составляющей.
2.Устройство по п. 1, о т л ич.ающееся тем, что блок коррекции частоты содержит последовательно соединенные входное пропорциональное звено и выходной сумматор второй вход которого подключен к источнику постоянного сигнала.
3.Устройство по п. 1, отличающееся тем, что блок расчета поправок содержит четыре входных множителя, образующих две пары, причем первые входы множителей каждо пары объединены и подключены к основному входу блока рас.чета поправок, вторые входы двух множителей разных пар подключены непосредственно, а двух других через фазовращатель - к первому дополнительному входу блока расчета поправок, а выходы двух множителей разных пар попарно подключен к выходным сумматорам, причем на выходе одного из указанных сумматоров подключен блок деления, второй вход которого подключен ко второму дополнительному входу блока расчета поправок, при этом на выходе блока делени и сумматора включены ключи, управляющие входы которых подключены к третьму дополнительному входу блока расчета поправок.
4.Устройство по п. 1, отличающееся тем, что трехфазная модель мгновенных значений аварийной составляющей содержит в каждой фазе два основных множителя, первые входы
которых подключены к входному сумматору, второй вход одного множителя непосредственно, а другого через фазовращатель подключен к выходу генератора периодических колебаний промышленной частоты, а выходы множителей через фильтры нижних частот - к интеграторам, два дополнительных множителя, один вход каждого из которых подключен к выходу соответствующего интегратора, другой - ко второму входу соответствующего основного множителя, а выходы - к двум входам дополнительного сумматора, выход которого подключен к инвертированному входу упомянутого входного сумматора и выходу модели мгновенных значений аварийной составляющей, причем на входе входного сумматора включен ключ, управляющий вход которого подключен ко второму входу модели мгновенных значени аварийной составляющей.
Источники информации, принятые во внимание при экспертизе
1.Лосев С. Б. и Чернин А. Б. Расчет электромагнитных переходных процессов для релейной защиты на линиях большой протяженности. М.,Энергия 1972.
2.Авторское свидетельство СССР № 187872, кл. Н 02 Н 3/00, 1966.
3.Гельфанд Я. С. и Зисман Л. С. Обнаружение повреждений в электрических сетях по мгновенным значениям
аварийных составляющих. - Средства и системы управления в энергетике 1975, I 1.
4.Авторское свидетельство СССР по заявке № 2056858/07,
кл. Н 02 Н 3/00, 1974.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ защиты распределительной электросети с нелинейной нагрузкой и силовым фильтром от перегрузки токами резонансной частоты и устройство для его осуществления | 1983 |
|
SU1337965A1 |
| Выявительный орган для защиты от несимметричного короткого замыкания трехфазной электроустановки | 1982 |
|
SU1116489A1 |
| Устройство для релейной защиты сети переменного тока от повреждения | 1976 |
|
SU723717A1 |
| Адаптивная система управления электромеханическим устройством торможения колеса | 2016 |
|
RU2643305C1 |
| ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ МОЩНОСТИ ТРЕХФАЗНЫХ ЦЕПЕЙ | 1991 |
|
RU2024882C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВОЛНЕНИЯ | 2012 |
|
RU2489731C1 |
| Способ пуска релейной защиты при повреждениях в сети трехфазного переменного тока | 1974 |
|
SU612329A1 |
| СПОСОБ ЦИФРОВОЙ ДИСТАНЦИОННОЙ ЗАЩИТЫ | 2010 |
|
RU2474940C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА МОЩНОСТИ В ТРЕХФАЗНОЙ ТРЕХПРОВОДНОЙ ЦЕПИ ПЕРЕМЕННОГО ТОКА | 2004 |
|
RU2263322C1 |
| Устройство для фильтрации в схемах релейной защиты | 1974 |
|
SU694928A1 |
Ым
