Изобретение относится к автоматизации производственных процессов и может быть использовано во всех отраслях народного хозяйства для бесконтактного измерения линейных размеров и индикации предметов. Известен пневмоакустический преобразователь положения, содержащий пневмоакустический излучатель и при емник акустических колебаний. Между излучателем и лоцируемой поверхностью образуются интерференционные полосы, положение которых определяется приемником и зависит от рассто яния между излучателем и лоцируемой поверхностью 1) . Недостатком устройства является то, что оно измеряет только отклоне ние лоцируемой поверхности от определенного положения в пределах поло вины длины акустической волны, а не абсолютное расстояние между ними. Наиболее близким по технической сущности и достигаемому результату к предлагаемому является пневмоакус тический преобразователь положения, содержащий источник питания сжатым воздухом, пневмоакустический генера тор типа сопла-резонатор, размещен.ный в параболическом отражателе,при емник акустических колебаний типа , сопло-сопло с раструбом, выход которого через струйный усилитель и пневмоэлектропреобразователь связан со входом пневмоакустического генератора, образующего с приемником колебательный контур, в цепь которого.включен частотомер 2. Недостатком устройства является низкая точность определения расстояния, так как цепь колебательного, контура включает в себя значительное количество элементов, имеющих большое время срабатывания, поэтому изменение расстояния будет приводить к незначительному изменению частоты в колебательном контуре. Кроме того, приемный элемент в данном устройстве подвержен засорению частицами пыли, что снижает надежность устройстЦель данного изобретения - повышение точности и надежности. Цель достигается за счет того, что вход пневмоакустического генератора выполнен в виде электромагнита, установленного над Г-образной упругой пластиной, один конец которой жестко закреплен, а другой - (отогнутая часть которого размещена между соплом и резонатором пневмоакус- тического генератора перпендикулярно оси сопла) размещен на упоре,причем раструб приемника акустических колебаний выполнен в виде кольцевого сопла, соединенного с источником питания сжатым воздухом. Кроме того, вход струйного усилителя,подключенного к приемнику, соединен через пневмосопротивление с выходом НЕ-ИЛИ.
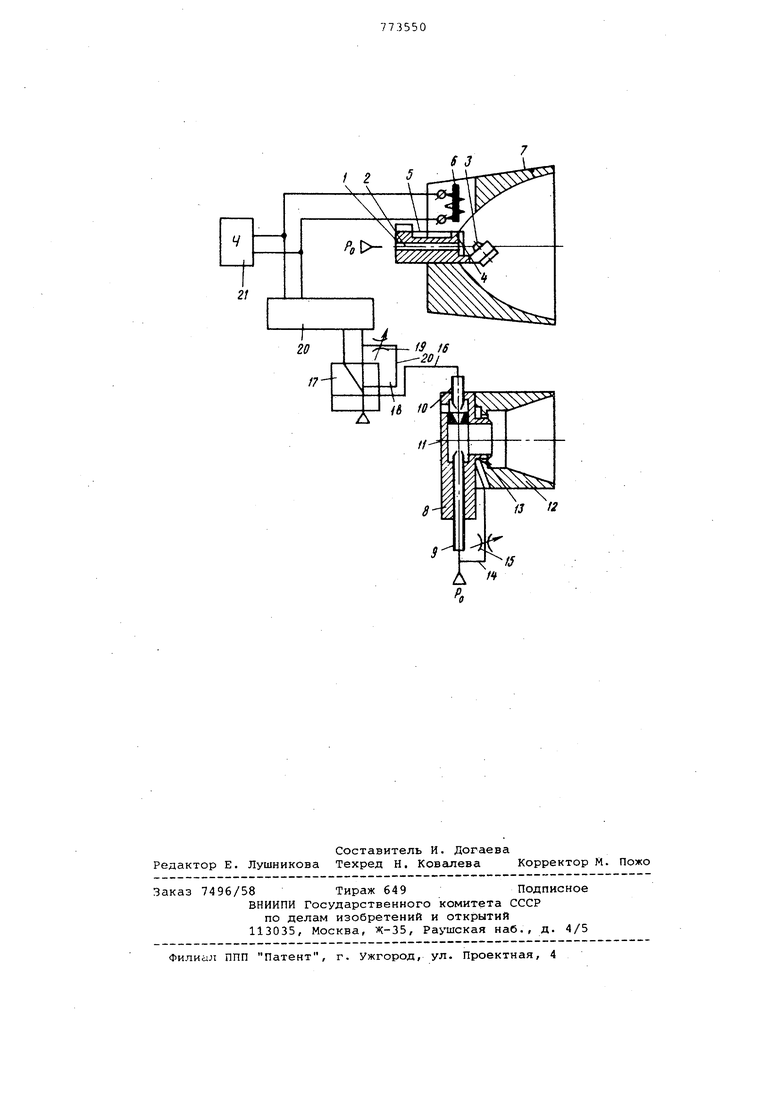
На чертеже изображена схема пневмоакустического преобразователя положения.
Пневмоакустический преобразователь положения содержит пневмоакусти,ческий генератор 1, состоящий из сопла 2 и резонатора 3, между которыми размещен отогнутый, лежащий на упоре 4, конец Г-образной упругой пластины 5. Другой конец пластины 5 жестко закреплен, а над пластиной расположен электромагнит б. Пневмоакустический генератор 1 помещен в параболический отражатель 7. Приемник акустических колебаний 8 имеет питающий 9 и приемный 10 капилляры. Между капиллярами расположена диафрагма 11. Раструб 12 приемника 8 выполнен в виде кольцевого сопла 13, соединенного пневмолинией 14 через дроссель 15 с источником питания сжатым воздухом (не показан). Приемный канал 10 приемника 8 соединен пневмолинией 16 со входом струйного усилителя 17, второ вход которого пневмолинией 18 через дроссель 19 соединен с выходом НЕИЛИ. Выходы струйного элемента 17 поданы на пневмоэлектропреобразователь 20, который связан с электромагнитом 6 и частотомером 21.
Пневмоакустический преобразователь работает следующим образом.
Сжатый воздух от источника питания (на схеме не показано) подводится к пневмоакустическому генератору 1, струйному усилителю 17 и к приемнику акустических колебаний 8, при этом в его питающем капилляре 9 образуется ламинарный поток, который попадает в приемный канал 10, что вызывает перелючение струйного усилителя 17 и замыкание цепи питания электромагнита 6 пневмоэлектропреобразователем 20. Электромагнит б притягивает Г-образную пластинку 5,открывая доступ струе, выходящей из сопла 2 к резонатору 3, который начинает излучать акустические колебания. Акустические колебания, в виде направленного пучка, сформированного параболлическим отражателем 7, излучаются на лоцируемую поверхность, отразившись от которой поЬадают в раструб 12 приемника 8. При этом ламинарный поток в нем турбулизуется и примыкает к диафрагме 11, что вызывает падение давления в приемном капилляре 10, происходит переключение струйного усилителя 17 и разглыкание цепи электромагнита 6. Пластинка 5 под действием упругих сил опускается и встает на упор 4, закрывая доступ струи из сопла 2 к резонатору 3,при этом излучение акустических колебаний прекращается. Когда задний фронт импульса акустических колебаний, отразившись от лоцируемой поверхности, достигнет приемника 8, то в нем между питающим 9 и приемным 10 каналами вновь образуется ламинарный поток. Затем .идет повторение вышеописанного цикла, частота которого зависит от расстояния до лоцируемой поверхности и определяется частотомером 21.
Формула изобретения
1.Пневмоакустический преобразователь положения,содержащий источник питания сжатым воздухом,Пневмоакустческий генератор типа сопло-резонатор, размещенный в параболлическом отражателе, приемник акустических колебаний типа сопло-сопло с раструбом, выход которого через струйный усилитель и пневмоэлектропреобразователь связан со входом пневмоакустического генератора, образуюцего с приемником колебательный контур, в цепь которого включен частотомер, отличающийся тем, что, сг целью повышения точности и надежности в нем вход пневмоакустического генератора выполнен в виде электромагнита, установленного над упругой Г-образной пластиной, один конец которой жестко закреплен, а другой, отогнутая часть которого размещена между соплом и резонатором пневмоакустического генератора перпендикулярно оси сопла, размещен на упоре, причем раструб приемника акустических колебаний выполнен в виде кольцевого сопла, соединенного с источником питания сжатым воздухом.
2. Преобразователь по п. 1, отличающийся тем, что, с целью увеличения чувствительности, вход струйного усилителя соединен через пневмосопротивление с выходом НЕ-ИЛЙ.
Источники информации, принятые во внимание при экспертизе
1.Залманзон А. А. Аэрогидродинамические методы измерения входных параметров автоматических систем. М., Наука, 1973, с. 256-261.
2.Авторское свидетельство СССР № 457054, кл. G 01 g 9/68, (прототип) .
-//
А /
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневмоакустический преобразовательпОлОжЕНий | 1979 |
|
SU794265A1 |
| Струйный чувствительный акустический элемент | 1985 |
|
SU1315669A1 |
| ПНЕВМОАКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2008 |
|
RU2357807C1 |
| Устройство для автоматической окраски изделий | 1982 |
|
SU1118423A1 |
| Пневмоакустический локатор | 1977 |
|
SU709843A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПОВЕРХНОСТНОГО НАТЯЖЕНИЯ ЖИДКОСТИ | 1997 |
|
RU2135981C1 |
| Струйный акустический преобразователь | 1981 |
|
SU972165A1 |
| Струйно-акустический логическийэлЕМЕНТ | 1979 |
|
SU821777A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПЛОТНОСТИ СЫПУЧИХ ВЕЩЕСТВ | 2002 |
|
RU2242741C2 |
| Пневмоакустический детектор | 1982 |
|
SU1037075A1 |