1
Изобретение относится к области станкостроения, в частности к устройствам для крепления релсущего инструмента на металлорежущих станках, преимущественно автоматизированных, а именно к многопозиционным инструментальным головкам типа револьверных с автоматическим поворотом.
Многопозипионная инструментальная головка предназначена для применения преимущественно на станках токарного типа с автоматическим управлением, например с числовым . программным управлением (ЧПУ), где требуется высокая точность фиксации в сочетании с повышенной надел ностью работы.
Известна многонозиционная инструментальная головка, предназначенная для металлорежущих станков токарного типа с программным управлением, содержащая основание, закрепленную на основании ось, корпус, установленный на оси с возможностью базирования на основании при помощи двух зубчатых полумуфт, механизм нодъема, поворота и зажима корпуса, включающий червячную передачу, связанную с приводом ее вращения, и винтовую передачу, связанную с корпусом, а также фиксатор, гнезда для него и поводок, предназначенный для связи механизма подъема, поворота и зажима с корпусом 1.
Недостатком известной многопозиционной инструментальной головки является то, что она недостаточно надежна в работе. Это объясняется тем, что поворотная часть имеет довольно значительную маховую массу. При смене позиции, когда эта масса поворачивается с определенной скоростью за счет развивающейся силы инерции, не исключена возможность перебега фиксатора
10 относительно заданного гнезда после выключения приводного двигателя. В этом случае при реверсе привода произойдет зажим корпуса головки с отклонением от заданной позиции, что при автоматическом
15 работы станка приведет к браку изделий.
Целью изобретения является повыщение наДел ности работы инструментальной головки. Для этого необходимо исключить
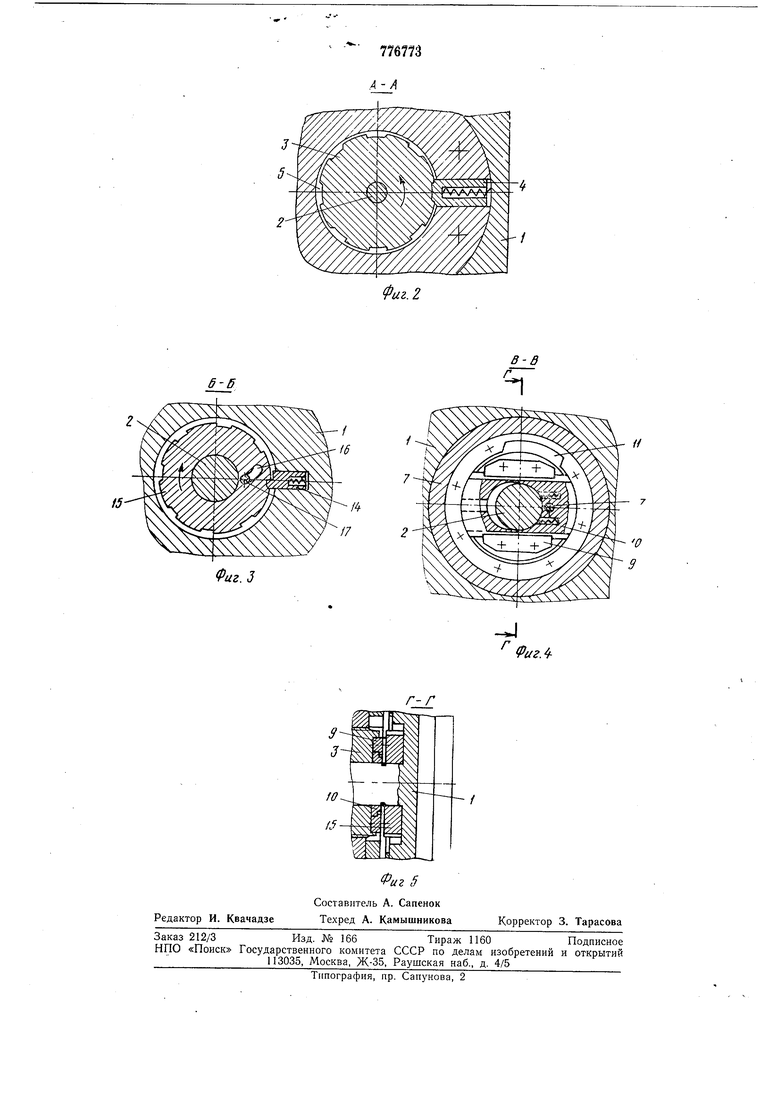
20 возмол ность случайного (непредусмотренного) перебега фиксатором заданного фиксированного положения в процессе . смены позиции инструментальной головки. Эта цель достигается тем, что фиксатор установлен в основании, а новодок выполнен в виде ползуиа и установлен в корпусе с возможностью взаимодействия с пазом, выполненным в червячном колесе механизма подъема, поворота и залшма корпуса, при30 чем головка снабжена установленным на оси диском с угловым пазом, взаимодействующим с пальцем, жестко связанным с поводком и гнездами, взаимодействующими с дополнительным фиксатором, установленным в основании с угловым смещением относительно основного фиксатора на величину перебега корпуса, принятую в пределах 7-10°. На фиг. 1 изображена головка, общий вид; на фиг. 2 - разрез А-А фиг. 1; на фиг. 3 - разрез Б-Б фиг. 1; на фиг. 4 - разрез В-В фиг. 1; на фиг. 5 - разрез Г-Г фиг. 4. Многоиозиционная инструментальная головка содержит устанавливаемое на суппорте станка основание 1 с закрепленной на нем осью 2. На оси 2 базируется корпус 3, несущий сменные инструментальные блоки. В основании установлен подпружиненный фиксатор 4, а на корпусе 3 выполнены гнезда 5 для этого фиксатора. Корпус приводится в движение механизмом его подъема, поворота и зажима, состоящим из червячной и винтовой передач. Червяк 6 червячной передачи связан с приводным электродвигателем (на чертежах не показан), а в центровом отверстии червячкого колеса 7 выполнена винтовая нарезка, составляющая вместе с ответной винтовой нарезкой 8 в корпусе 3 винтовую передачу. ria нижнем торце корпуса 3 закреплены две направляющие 9, между которыми с возможностью продольного перемещения установлен поводок 10, выполненный в виде подпружиненного ползуна, имеющего возможность продольного перемещения вдоль направляющих 9 в поперечной плоскости головки. Ь раоочем положении поводок 10 взаимодействует с пазом И, выполненным на червячном колесе /, и таким ооразом осуществляет кинематическую связь корпуса 6 с механизмом его подъема, поворота и зажима. tla основании жестко закреплена зуочатая нолумуфта 12, взаимодействующая с зуочатои иолумуфтои 15, закрепленной на корпусе. Червячное колесо / оазируется в расточке основания 1 по наружному диаметру. Кроме этого инструментальная головка снаижена дополнительным подпружиненным фиксатором 14, установленным в основании, и диском It) с гнездами для этого фиксатора. диск 1О посажен на оси 2 с возможностью свооодного вращения. Ь то же время диск 1о кинематически связан с поводком 10. Связь осуществлена тем, что на диске lt выполнен наз Ш, расположенный под углом к продольной оси поводка, а на поводке 10 жестко закреплен взаимодействующий с этим пазом палец 17. При положении диска 15, когда его гнезда для фиксатора находятся строго под гнездами 5 для основного фиксатора 4,
-...776773 т. е. совпадает по углу расположения, дополнительный фиксатор 14 смещен относительно положения основного фиксатора 4 на угол, приблизительно равный углу запрограммированного перебега фиксатором 4 заданного гнезда 5. Так как запрограммированный перебег равен но углу 7-10°, то и фиксатор 14 смещен относительно фиксатора 4 на угол 7-10° по направлению прямого вращения механизма подъема, поворота и корпуса. Контроль позиции осуществляется от ползункового переключателя (на чертежах не показан). Работает описанная многопозиционная инструментальная головка следующим образом. Для смены позиции головки включается прямое вращение приводного электродвигателя. Вращение через червяк 6 передается на червячное колесо 7, которое в таком случае вращается по часовой стрелке. Новодок 10 в это время утоплен, т. е. скользит по гладкой поверхности колеса 7 и не передает вращения на корпус 3. В результате взаимодействия винтовой нарезки колеса 7 „ винтовой нарезки 8 корпус 3 поднимает-ся вверх. При этом некоторый момент вращения, образующийся за счет трения в винтовой передаче и трения поводка 10 о колесо 7, компенсируется сопротивлением, создаваемым подпружиненными фиксаторами 4 и 14. Подъем корпуса 3 происходит до полного выхода из зацепления зубчатых венцов полумуфт 12 и. 13. В момент, когда между зубьями венцов образовался безопасный зазор, паз 11 на колесе 7 в процессе вращения последнего набегает на поводок 10, который под действием своих пружин западает в паз 11 и тем самым связывает колесо 7 механизма подъема поворота и зажима с корпусом 3. Происходит поворот корпуса 3 до новой заданной позиции. При повороте фиксаторы 4 и 14 «прощелкивают, т. е. западают и тут же выходят из гнезд по их косому скосу. В тот момент, когда заданное гнездо & перебежит фиксатор 4 на 7-10°, фиксатор 14 западает точно в гнездо на диске 15. После этого система управления подает команду на реверс приводного двигателя. Колесо 7 начинает вращаться в противоположную сторону. Обратное вращение колеса 7 передается через поводок 10 на корпус 3. Происходит выборка перебега, т. е. обратный доворот на те 7-10, на которые заданное гнездо перебежало фиксатор 4. В результате такого доворота фиксатор 4 западает в заданное гнездо и этим корпус окончательно фиксируется в заданной позиции. В процессе обратного вращения колеса 7 (после реверса привода) диск 15 вращаться не может, так как застопорен фиксатором 14. Поэтому палец 17, закрепленный на поводке 10, вынужденно перемещается вдоль наклонного паза 16. Паз 16 выполнен по длине и расположен под таким углом к продольной оси поводка 10, что за время, пока происходит выборка перебега корпуса 3, палец 17 успевает переместиться из одного конца паза 16 в другой. При этом палец 17 выводит поводок 10 из паза И. на колесе 7. Этим достигается.прекращение передачи вращательного движения- колёса- 7 на корпус 3, причем происходит это а-вт(эйатически и одновременно с западанием фиксатора 4 в заданное гнездо..: При дальнейшем вращении колеса 7 они взаимодействует с корпусом только по резьбе 8, в результате чего происходит опускание корпуса 3. Зубчатые венцы полумуфт 12 и 13 входят в зацепление и происходит зажим корпуса 3 на основании 1, и затем привод выключается. При следующей смене позиции описанный процесс повторяется. Формула изобретения 1. Многопозиционная инструментальная головка, содержащая основание, закрепленную на основании ось, корпус, установленный на оси свозможностью базирования на основании при помощи двух зубчатых полумуфт, механизм подъема, поворота и зажима корпуса, включающий червячную пере :
в
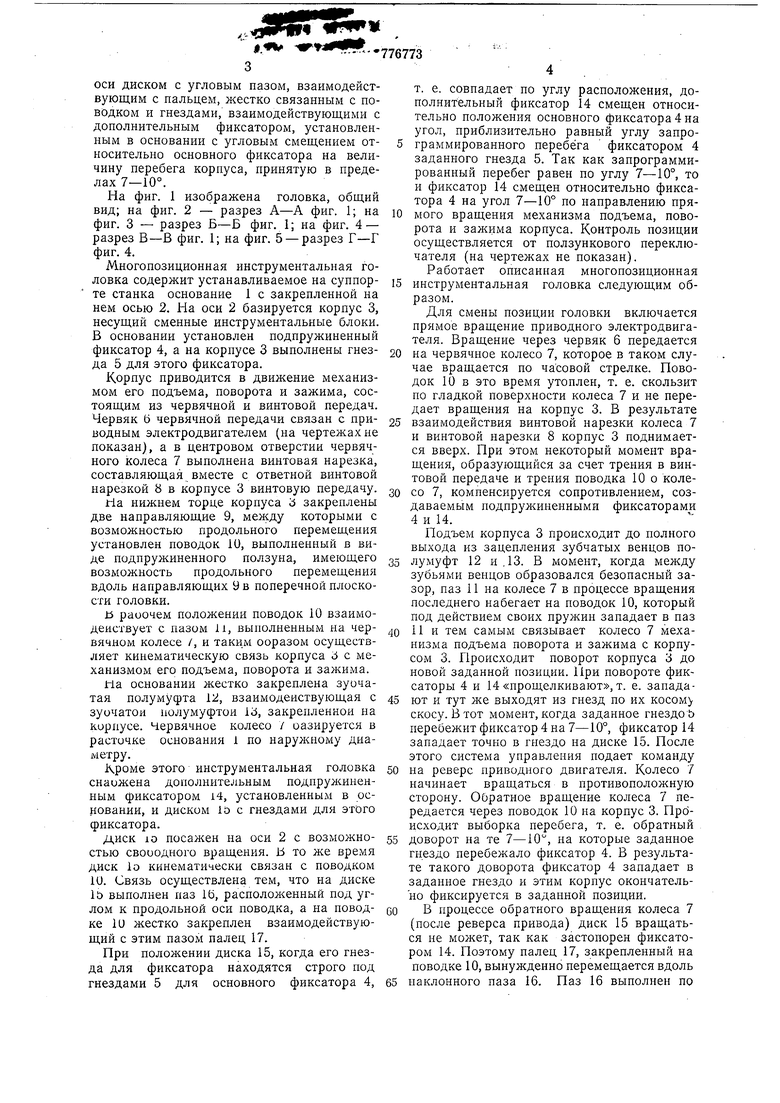
д to 2 3 /7 15 /
776773 Фиг. / дачу, связанную с приводом ее вращения, и винтовую, передачу, связанную с корпусом, а также фиксатор, гнезда для него и поводок, предназначенный для связи механизма подъема, поворота и зажима с корпусом, отли.ч ающа яся тем, что, с целью повышения надежности работы, фиксатор установлен в основании, а поводок выпол нен в биде ползуна и установлен в корпусе с возможностью взаимодействия с пазом, выполненным в червячном колесе механизмй. подъема поворота и зажима корпуса, причем головка снабжена установленным на оси диском с угловым пазом, предназначенным для взаимодействия с введенным в головку пальцем, связанным с поводком, .и гнездами, предназначенными для взаимодействия с введенным в головку дополнительным фиксатором, установленным в основании с угловым смещением относительно упомянутого фиксатора на величину перебега корпуса. 2. Инструментальная .головка, по п. 1, отличающаяся тем, что упомянутое угловое смещение принято в пределах 7-10°. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 541592, кл. В 23В 29/32, 1973.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многопозиционная инструментальная головка | 1990 |
|
SU1787696A1 |
| МНОГОПОЗИЦИОННАЯ ИНСТРУМЕНТАЛЬНАЯ ГОЛОВКА | 1992 |
|
RU2071870C1 |
| Многопозиционная инструментальная головка | 1973 |
|
SU541592A1 |
| Автоматическая револьверная головка | 1984 |
|
SU1194590A2 |
| АВТОМАТИЧЕСКАЯ РЕВОЛЬВЕРНАЯ ГОЛОВКА | 1993 |
|
RU2051012C1 |
| Многопозиционная инструментальная головка | 1979 |
|
SU882706A1 |
| Револьверная головка | 1989 |
|
SU1683881A1 |
| Автоматическая револьверная головка металлорежущего станка | 1980 |
|
SU944803A1 |
| Револьверная головка | 1988 |
|
SU1696158A1 |
| Многопозиционная инструментальная головка | 1973 |
|
SU579103A1 |