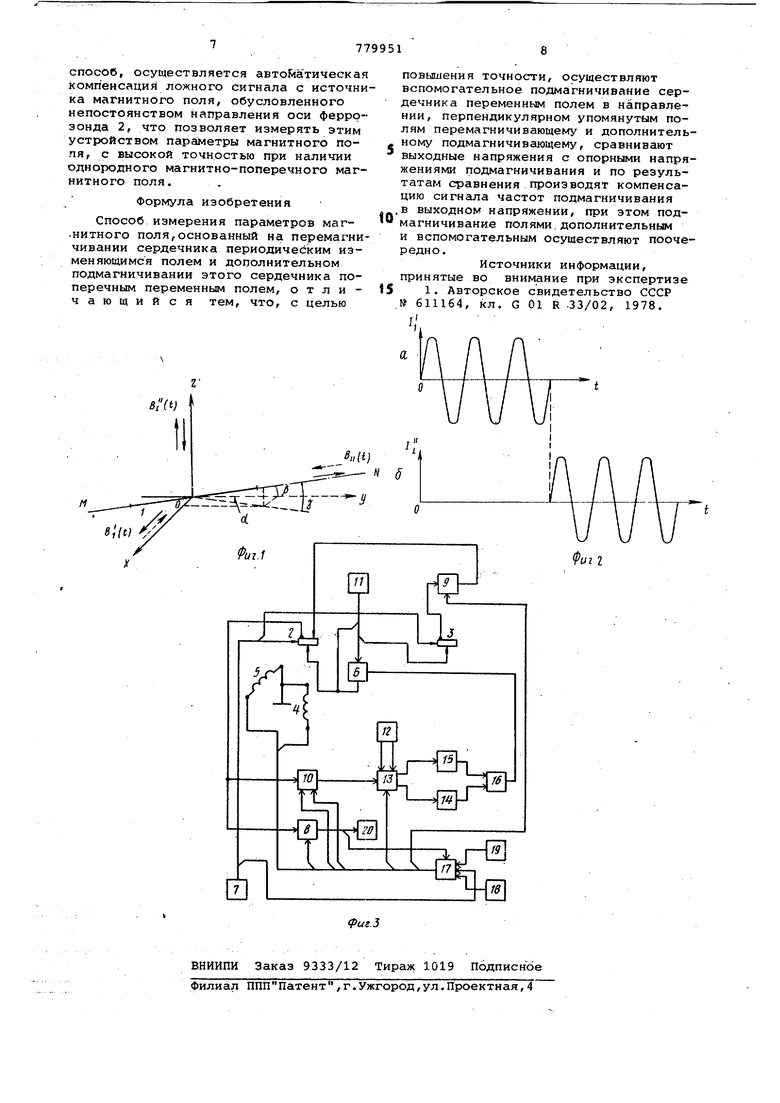
и дополнительному подмагничивающему, сравнивают выходные напряжения с опор ными напряжениями подмагничивания и по результатам сравнения производят компенсацию сигналов частот подмагничивания в выходном напряжении, при этом подмагничиван11е полями дополнительным и вспомогательным осуществляют поочередно. Поперечные подмагничиваюсдае магнитные поля действуют поочередно в направлениях перпендикулярных магнитной оси ферромодуляционного преобра зователя (феррозонда). При таком режиме работы феррозондав выходнойЭДС его поочередно появляются составляюlUHe ЭДС с частотами, равными частотам подмагничиваюших полей. При этом амплитуды и фазы упомянутых составляющих ЭДС изменяются пропорционально приращению углов между направлениями подмагничивающих поперечных магнитных полей и магнитной осью феррозонда. На личие в выходной ЭДС феррозонда известной частоты сигнала, пропорционального измерению направления его магнитной оси, дает возможность выделить этот сигнал, осуществить его компенсацию или вернуть эту ось в первоначальное положение. На фиг. 1 показаны направления продольного перемагничивающего и поперечных подмагничиваююих магнитных полей сердечника феррозонда; на фит. 2 изображены временные, диaгpa tt ы токов, создающих переменные подмагничивающиё ПОЛЯ; на фиг. 3 изображена структурная схема устройства,осуществ ляющего предлагаемый cnocQfS измерения параметров магнитного поля. Согласно данному способу (см. фиг,1 сердечник феррозонда 1 перемагничивается в продольном направлении оси MN переменным полем В, (t) в заданные интервалы времени в поперечных направ лениях оси ОХ и оси OZ подмагничивается переменными полями Bj.(t) и Bj (t) Магнитная ось MN сердечника феррозонда 1 отклонена от исходного положения (оси ОУ) на угол р. Угол между осью феррозонда 1MN и осью ОZ равен (/2Y), а угол между проекцией оси MN на плоскость ХОУ и осью ОУ равен of . При малых углах oL, | и отклонение оси MN от оси ОХ пропорционально Bj (t)) «d-BjL (t), a отклонение от оси OZ - Bi. (t)sin YBi (t Подмагничивающие поля Bj (f) и BX (t) в поперечных направлениях cos да1ются переменными тока JJL (t) и jj (t) (см. фиг. 2а,б), частоты кото рых много меньше частоты перемагничи вающего поля Вя (t) (см. фиг. 1). Пе ременные токи Ji (t) и jj (t) (см. фиг. 26) Подаются поочередно а задан йЫе интервалы времени, чтопозволяет По сигналу в выходной ЭДС феррозонда определить изменение направления оси ММ (см. фиг. 1) , Подмагничивание сердечника .феррозонда 1 (см. фиг. 1) в поперечных направлениях полями Ъ (t.) и Bj. (t) позволяет получить в выходной ЭДС феррозонда переменные сигналы (напряжения) с частотами подмагничивания, пропорциональные измерению направления его магнитной оси MN. Информацию об изменении направления магнитной оси MN ферро-зонда используют для устранения ложного сигнала при измерении параметров магнитного поля упомянутых феррозондом, что позволяет значительно повысить точность измерения и довести ее до уровня щума. Устройство (см. фиг. 3), реализующее способ, содержит основной 2 и дополнительный 3 феррозонды, разнесенные в пространстве, оси которых параллельны или соосны, две обмотки подмагничивающего поля 4 и 5, управляемый аттенюатор ложного сигнала б, источник .переменного тока7, синхронные детекторы основной 8, дополнительный 9 подмагничивающего поля 10, блок ЭДС компенсации 11, опорный источник напряжения 12, схему сравнения 13, запоминающее устройство 14 и 15, сумматор 16, распределительную схему 17, генератор импульсов 18, генератор подмагничивающей частоты 19 и регистрирующий прибор) 20, при этом,обмотки 4 и 5 расположены на феррозонде 2, а их оси перпендикулярны друг другу и оси феррозонда 2, первые входы феррозондов 2 и 3 подключены к источнику переменного тока 7, второй вход феррозонда 2 подключен к выходам блока ЭДС 11 и аттенюатора б, первый вход которого подключен к блоху ЭДС компенсации 11, а второй к выходу сумматора 16, второй вход феррозонда 3 подключен к выходу источника компенсации 11, выход феррозонда 2 подключен к первым входам синхронных детекторов 8 и 10, выход феррозонда 3 подКлючен к первому входу синхронного детектора 9, выход которого подключен к третьему входу феррозонда 2, выходы синхронного детектора 8, источника переменного тока 7 генера.тора импульсов (ГИ) 18 и генератора подмагничивающей частоты (ГПЧ) 19 подключены к распределительной схеме 17, выходы которой подключены ко tiходам коммутации синхронных детекторов 8, 9 и 10 к обмоткам подмагничивающего поля 4 и 5 и к первому входу схемы сравнения 12, второй вход которой подключен к выходу синхройного детектора 10, а третий и четвертыйг к вых6ду бпорного источника напряжения 12, входы запоминающих устройств 14 и 15 подключень к выходам схемы сравнения 13, а выходы - ко входу сумматора 16.
Устройство для измерения параметров магнитного поля работает следующим образом.
Феррозонды 2 и 3 измеряют проекции векторов индукции магнитных полей на оси этих феррозондов (продольные составляющие магнитных полей, К феррозондам 2 и 3 подводятся возбуждающие колебания от источника перемен ного тока 7. Выходной сигнал с феррозонда 3 детектируется синхррнным детектором 9 и поступает на третий вход феррозонда 2, при этом осуществляется компенсация вариации продольной составляющей геомагнитного поля в феррозонде 2. исходной сигнал с блока ЭДС компенсации 11 осуществляет компенсацию продольной оставляющей однородного геомагнитного поля в феррозондах 2 и 3. С выхода основного феррозонда 2 сигнал, пропорциональный продольной составляющей вектора индукции магнитного поля, подается на синхронные детекторы 8 и 10. С выхода синхронного детектора 8 сигнал поступает на распределительную схему 17 и на регистрирующий прибор 20, показания которого пропорциональны проекции вектора индукции магнитного поля на ось феррозонда 2, созданной источником упомянутого поля. На выходы коммутации синхронных детекторов 8, 9 и 10 подаются сигна.лы с источника переменного тока 7, которые поступают с выхода этого источника через распределительную,схему 17. На вход коммутации синхронного детектора 10 подается также сигнал с генератора 19, который поступает с выхода этого генератора через распределительную схему 17. С генератора 18 подаются тактовые импульсы на вход схемы 17. Через распределительную схему 17 в определенные интервалы времени подключается генератор 19 то к обмотке 4, ТО к Обмотке 5. .При протекании токов по обмоткам 4 на основной феррозонд 2 действуют поперечные магнитные поля. В случае, если магнитная ось феррозонда 1 не перпендикулярна осям обмоток 4 и 5, то на выходе упомянутого феррозонда поочередно возникают амплитудно-модулированные колебания. Измен гние магнитной оси феррозонда 2 приводит к изменению коэффициента модуляции амплитуд но-модули1)ованных колебаний (коэффициента модуляции одного из амплитудно-модулированных колебаний) на выходе форрозонда 2, Фазы огибающих амплитудно-модулированных колебаний могут изменяться скачком от 6 до 180 при изменении направления магнитной оси феррозонда 2. Для выделения ЭДС, насущих информацию об изменении направления магнитной оси феррозонда 2 и ее детектировании применяются детектор подмагничивающей частоты 10, на входы коммутации которого поступают сигналы с распределительной схемы 17, а на первый вход - сигнал с выхода феррозонда 2. Выходной сигнал с синхронного детектора 8, поступающий на вход схемы 17 осуществляет упе равление сигналов коммутации детектора 10. Сигналы с выхода детектора подмагничивающей частоты 10 поступают на схему сравнения 13. На другие входы схемысравнения 13 поступают сигналы с опорного источника напряхе ВИЯ 12 и распределительной схемы 17. Сигналы с распределительной схемы 17 осуществляют управление сравнивающихся сигналов в схеме 13, поступающих С опорного источника напряжения 12 и 15 с детектора 10, и передачу выходного сигнала с упомянутой схемы 13 на входы запоминающих устройств 14 и 15. Выходные сигналы с запоктонающих устройств 14 15 поступают на вход tf сумматора 15, а с его выхода на вход аттенюатора ложного сигнала 6, который изменяет ток компенсации геомагнитного поля феррозонда 2 пропорцибнальноложному сигналу, 5 обусловленному изменением направления магнитной оси этого феррозонда при наличии геомагнитного поля, осуществляв его компенсацию.
Работу схемы -сравнения 13 можно представить следующим образом, Если в один интервал времени через распределительную схему 17 подключается генератор подмагничиваю1ц6й частоты 19 к обмотке подмагничивающего поля 4,.то в схеме 13 осуществляется сравнение сигналов с одного из выходов опорного источника напряжения 12 и с выхода детектора 10.При этом со схемы сравнения 13 сигнал через запоминающее устройство 0 14 и сумматор 16 поступает на аттенюатор 6.Выходной сигнал с сумматора 16 изменяет сопротивление управляемого аттенюатора пропорционально изменению сигналасо схемы сравнения 13.В слеf цующий интервал времени через распре-, делительную схему 17 подключается генератор 18 к обмотке подмагничивающего поля 5,В схеме 13 осуществляется сравнение сигналов со второго выхода опорного, источника напряжения 12 и с 0 выхода детектора 10.В этом случае . сигнал со cxqbftj сравнения 13 через запоминающее устройство 15 и сумматор 16 поступает на-аттенюатор 6. РЫХОДНОЙ сигнал с-сумматора 16 из5 Меняет сопротивление управляемого аттенюатора 6 пропорционально изменению сигноша по схеме сравнения 13.
Ток компенсацииферрозонда 2 изменяется пропорционально изменению сопротивления управляемого аттенюатора 6.
Таким образом, в устройстве для измерения параметров магнитного поля, . 5 в котором осуществлен предлагаемый
| название | год | авторы | номер документа |
|---|---|---|---|
| Градиентометр | 1976 |
|
SU687425A1 |
| Устройство для измерения слабых геомагнитных полей | 1986 |
|
SU1347063A1 |
| Устройство для измерения параметров магнитного поля | 1989 |
|
SU1691795A1 |
| Способ измерения переменной магнит-НОй иНдуКции и уСТРОйСТВО для ЕгООСущЕСТВлЕНия | 1979 |
|
SU822093A1 |
| Способ измерения магнитного поля и устрой-CTBO для ЕгО РЕАлизАции | 1979 |
|
SU832502A1 |
| Формирователь геомагнитного репера | 1983 |
|
SU1137191A1 |
| Устройство для измерения градиента магнитного поля | 1976 |
|
SU662885A1 |
| Устройство для измерения неоднородности магнитных потоков | 1978 |
|
SU742838A1 |
| Градиентометр | 1978 |
|
SU789949A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ МАГНИТНОГО ПОЛЯ | 2013 |
|
RU2534424C1 |
