(54) УСТРОЛСТВО ДЛЯ КОНТРОЛЯ АСИМ11ЕТРИИ ПОСТОЯННЫХ МАГНИТОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля асимметрии постоянных магнитов | 1973 |
|
SU448409A1 |
| Устройство для исследования топографии магнитных полей | 1977 |
|
SU746351A1 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЯ ИЗДЕЛИЙ ИЗ ФЕРРОМАГНИТНЫХ МАТЕРИАЛОВ | 2007 |
|
RU2357265C2 |
| Устройство для измерения напряженности магнитных полей в дефектоскопии | 1986 |
|
SU1383194A1 |
| Цифровой измеритель квадратаМАгНиТНОй иНдуКции | 1979 |
|
SU838621A1 |
| Цифровой измеритель магнитной индукции | 1974 |
|
SU521537A1 |
| Устройство для измерения магнитных параметров высококоэрцитивных магнитных материалов | 1987 |
|
SU1541545A1 |
| Автоматический компаратор | 1976 |
|
SU657375A1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ МОЩНОСТИ:!оюзя-°-^'-^^•^?ПНП-.ТслНл^;::^:^:;:| | 1972 |
|
SU351170A1 |
| Устройство для измерения магнит-НыХ пОлЕй | 1979 |
|
SU819764A1 |
1
Иэобретение относится к контроль, ю-измерительным устройствам/ испольsyeMtoM при производстве Прецизионных магнитоэлектрических преобразователей с постоянными магнитами (напримерг датчиков момента) для контроля магнитной асимметрии постоянных магнитов.
По основному авт.св. 448409 известно устройство, содержащее координатный блок, измерительный зонд «О с датчиком Холла, генератор переменного напряжения, датчик уровня компенсации, блок вычитания, перекпютель пределов измерения, усилитель, датчик показателя экстремума, блок t5 управления координатным устройством, регистрирующий блок и управляемый ключ 1,.
Недостаток известного устройства заключается в том, что такое устрой- 20 ство позволяет измерять только один вид магнитной асимметрии постоянных магнитов, который проявляется.в виде смещения максимума кривой индукции .над полюсом магнита, Экспёрименталь- 2S ные исследования поля постоянного маг нита показали, что имеется вторая разновидность магнитной асимметрии, проявляющаяся в виде несимметричности распределения индукции над полюсом JO
Такой вид .асирдалетрйи является при чиной возникновения ряда пограиностей магнитоэлектрических преобразователей, например, нестабильность крутизны выходной характеристики, возникновение нерабочих сил и моментов.
Цель изобретения - расширение функциональных возможностей устройства для контроля магнитной асимметрии.
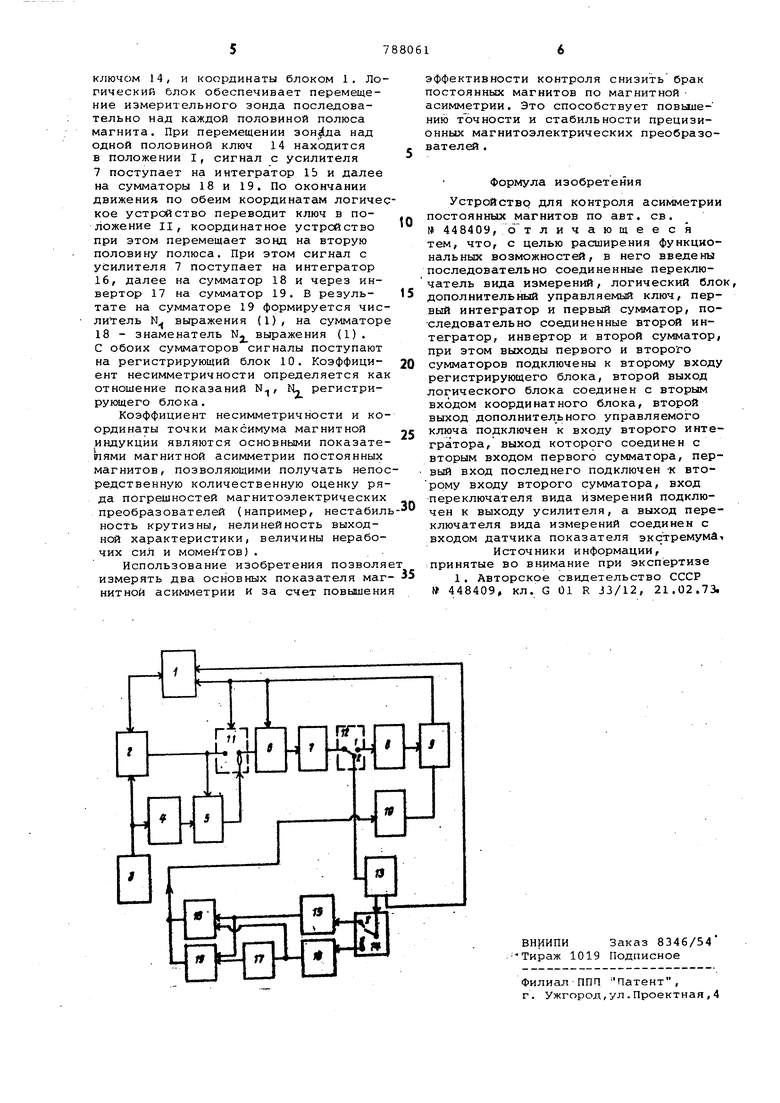
Цель достигается тем, что в устройство для контроля асимметрии постоян-ных магнитов, содержащее датчик Холла и датчик уровня компенсации, подключенные к генератору переменного напряжения, координатное устройство, своим выходо,м подключенное к датчику Холла, блок вычитания, входы которого подключены к датчику Холла и датчику уровня ксмлпенсации, а выход связан с управляемым ключом, включенным между датчиком Холла и переключателем пределов измерения, усилитель, регистрирующий блок двухканальный зкспе-риментальный регулятор шагового типа, содержащий датчик показателя экстремума, соединенный с выходом усилителя и блок управления координйтньм устройстве, вход которого подключен к датчикупоказателя зкстремума, а йлход соединен с регистрирующим блоком. введены- последовательно соединенные п реключатель вида измерений, логический блок, дополнительный управляемый ключ, первый интегратор и первый сумматор, последовательно соединенные второй интегратор, инвертор и второй сумматор, при этом выходы первого и второго сумматоров подключены к второ му входу регистрирующего блока,, второй выход логического блока соединен с вторым входом координатного блока, второй выход дополнительного управляемого ключа подключен к входу второго интегратора, выход которого соединен с вторым входом первого сумматора, первый вход последнего подключен к второму входу второго сумматора, вход переключателя вида измерений подключен к выходу усилителя, а выход переключателя вида измерений соединен с входом датчика показателя экстремума Яа чертеже представлена блок-схема устройства. Устройство содержит координатный блок 1, измерительный диод с датчиком 2 Холла, генератор 3 переменного напряжения, датчик 4 уровня компенсации, блок 5 вычитания, переключатель 6 пределов измерения, усилитель 7, датчик 8 показателя экстремума., блок 9 управления координатным устройством регистрирующий блок 10, управляемый ключ 11, переключатель 12 вида измере ний, логический блок 13, Дополнительный управляемый ключ 14, интеграторы 15 и 16, инвертор J.7 и сумматоры 18 и 19. Устройство работает следующим образом. Измерение обоих видов асимметрии магнитов производится в двух режимах устанавливаемых переключателем 12 вида измерений. В первом режиме определяются коор динаты максимального значения магнит ной индукции над полюсом магнита,. Дл этого переключатель 12 устанавливает ся в положение 1. Координатный блок включающий два исполнительных двигателя с понижающими редукторами, осуществляет двухкоординатное перемещение зонда с.датчиком 2 Холла относительно поверхности полюса контролируемого магнита. ЭДС с датчика Холла пропорциональная индукции магнитного поля, поступает на переключатель 6 пределов измерения. С выхода усилите ля 7 сигнал поступает на вход двухка нального экстремального регулятора ша гового типа, включающего датчик 8 показателя экстремума блок 9 управл ния координатным устройством и координатное устройство. Блок 9 управления координатным устройством Произво дит остановку шаговых двигателей пос ле того, как уровень сигнала с датчи . показателя экстремума становится ниж порога чувствительности регулятора, и переключает предел измерения на более точный, после чего продолжается поиск максимума. В целях повышения точности контроля магнитной асимметрии в устройстве предусмотрена возможность определения незначительных отклонений магнитного поля, что имеет место вблизи точки максимума. Для этого датчиком 4 уровня компенсации задается необходимый уровень компенсируемого поля. Далее сигнал поступает на блок 5 вычитания, где вычитается из сигнала с датчика Холла. Датчик Холла и датчик уровня компенсации питаются от сдного генератора напряжения, Со схемы вычитания сигнал, пропорциональный отклонению магнитного поля от заданного уровня, поступает на переключатель пределов измерения. Переключение на схему компенсации осуществляется блоком 9 управления после перехода на самый малый предел измерения с помощью управляемого ключа 11. В момент достижения точки абсолютного экстремума производится остановка обоих двигателей. Координаты точки экстремума, характеризующие магнитную асимметрию, определяются регистрирующим блоком 10, который содержит счетчики импульсов для каждой из координат. Во втором режиме определяется несимметричность магнитной индукции относительно геометрической оси магнита Исследования показывают, что в магнитоэлектрических преобразователях выходной сигнал зависит от величины магнитной индукции, усредненной по активной зоне рабочего зазора (зоне расположения рабочих обмоток). Поэтому второй вид асимметрии оценивается коэффициентом, несимметричности индукции Tf, определяемым как отношение разности средних значений индукции, с обеих половин полюса , pj среднему значению по всему полюсу B.Ua)dd.,J)dcLdZ i-dLnО О ( cpi сра. 1 Вера 2 Ал f 2р - координаты, ограничивающие активную зону рабочего зазора. Поскольку измерение магнитной индукции осуществляется дискретно,определение коэффициента несимметричности осуществляется численным методом путем суммирования значений индукции на каждом шаге координатного устройства. Для этого переключатель 12- устанавливйется в положение 11.Сигнал с вы хода усилителя 7 поступает на логичес,кое устройство 13, которое управляет ключом 14, и координаты блоком 1, Ло гическия блок обеспечивает перемещение измерительного зонда последовательно над каждой половиной полюса магнита. При перемещении эонг1да над одной половиной ключ 14 находится в положении I, сигнал с усилителя 7 поступает на интегратор 15 и далее на сумматоры 18 и 19. По окончании движения по обеим координатам логиче кое устройство переводит ключ в положение II, координатное устрсйство при этом перемещает зонд на вторую половину полюса. При этом сигнал с усилителя 7 поступает на интегратор 16, далее на сумматор 18 и через инвертор 17 на сумматор 19. В результате на сумматоре 19 формируется чис литель N выражения (1), на сумматор 18 - знаменатель IJ выражения (1) . С обоих сумматоров сигналы поступают на регистрирующий блок 10. Коэффициент несимметричности определяется как отношение показаний N, ьц регистрирующего блока.Коэффициент несимметричности и координаты точки максимума магнитной индукции являются основными показателями магнитной асимметрии постоянных магнитов, позволяющими получать непос редственную количественную оценку ряда погрешностей магнитоэлектрических преобразователей (например, нестабил ность крутизны, нелинейность выходной характеристики, величины нерабочих сил и MOMei TOB) . Использование изобретения позволя измерять два основных показателя магнитной асимметрии и за счет повышения эффективности контроля снизить брак постоянных магнитов по магнитной асимметрии. Это способствует повышению точности и стабильности прецизионных магнитоэлектрических преобразователей . Формула изобретения Устройство для контроля асимметрии постоянных магнитов по авт. св. № 448409, 6т личающееся тем, что, с целью расширения функциональных возможностей, в него введены последовательно соединенные переключатель вида измерений, логический блок, дополнительный управляемый ключ, первый интегратор и первый сумматор, последовательно соединенные второй интегратор, инвертор и второй сумматор, при этом выходы первого и второго сумматоров подключены к второму входу регистрирующего блока, второй выход логического блока соединен с вторым входом координатного блока, второй выход дополнительного управляемого ключа подключен к входу второго интегратора, выход которого соединен с вторым входом первого сумматора, первый вход последнего подключен -к вто рому входу второго сумматора, вход переключателя вида измерений подключен к выходу усилителя, а выход переключателя вида измерений соединен с входом датчика показателя экстремума. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР 448409, кл. G 01 R J3/12, 21.02.73.
