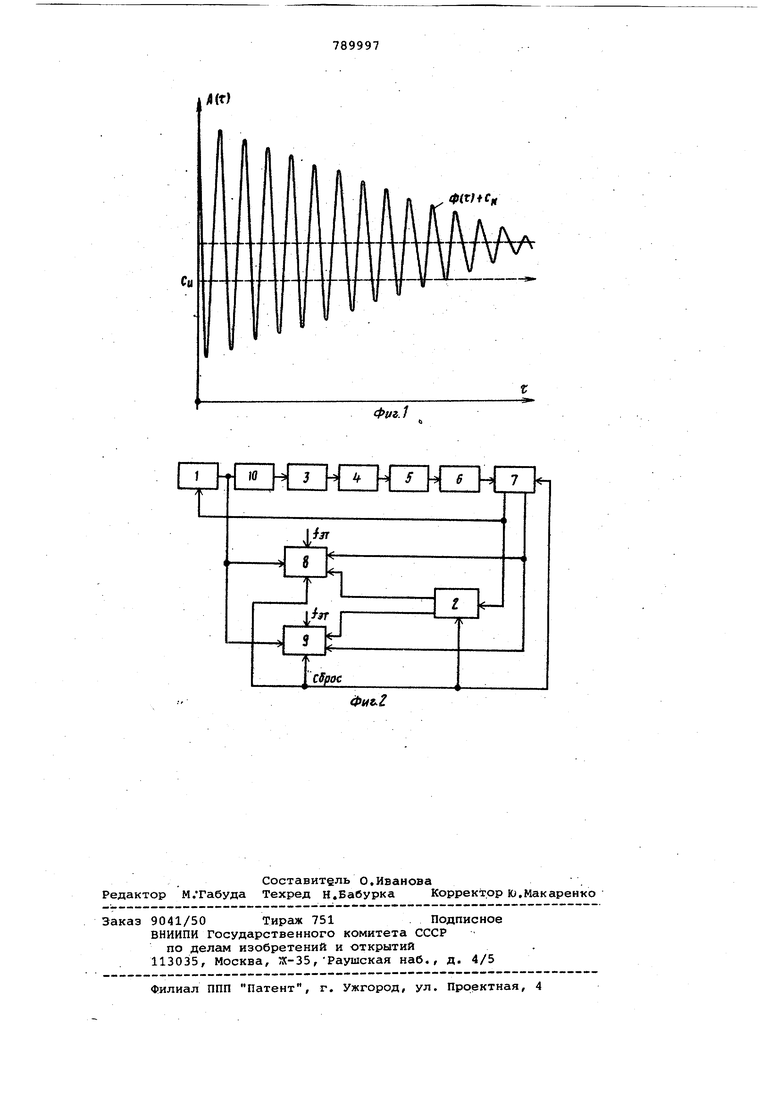
Изобретение относится к электроизмерительной технике и может быть использовано для измерения несущей частоты колебательных объектов с малой памятью. Известны способы, включающие выделение огибающей радиоимпульсов и запо нение полученных видеоимпульсов часто той от опорного генератора fl. Недостаток известных устройств за ключается в низкой точности измерения несущей частоты колебательных объектов с малой памятью. Наиболее близким по технической сущности к предлагаемому является способ измерения несущей частоты коле бательных объектов, включающий воздей ствие на контролируемый объект входным сигналом, регистрацию выходного сигнгша, который затем дискретизирует во времени, запоминают, многократно воспроизводят и путем цифровой обработки получают автокорреляционную функцию колебательного процесса 12. Недостатк 1ми этого способа являются его низкие точность и помехоустойчивость . Цель изобретения - повышение тсчнс сти и помехоустойчивости способа. Указанная цель достигается тем, что в известном способе, включающем воздействие на контролируемый объект входньли сигналом и регистрацию выходного сигнала, в качестве входного сигнала используют прямоугольный импульс переменной длительности, а выходной сигнал после регистрации квадратируют, интегрируют, сравнивают с опорныгсигналом, при выбранном количестве совпадений которого с выходным сигналом измеряют максимальную и минимальную длительности входного прямоугольного импульса переменной длительности а период несущей частоты определяют по формуле (n-21u)(uOott&t) t.ot ;где n- число точек совпадения функi ций do.CC) в единичной выборке с заданным значением опорного сигнала; (t;) - автокорреляционная функция выходного сигнала; At - погрешность определения первой и п -и точки совпадения автокорреляционной функции с заданным значением опорного сигнала. На фиг. 1 приведена временная диаграмма, поясняющая сущность споc66aj на фиг. ,2 - блок-схема устройства, реализующего данный способ. Сущность способа состоит в еледующем. При подаче прямоугольного импульса на вход контролируе54ого объекта его выходной сигнал (отклик) предста ляет собой сумму реакций от переднег и заднего фронтов прямоугольного импульса. Обозначив реакцию от переднего фронта Lc / а от заднего фронта U Ci-Tli выполним следующие преоб разования: .cti u Cftfdlt причем время интегрирования Т должно быть меньше периода следования прямоугольных импульсов с тем, чтобы ин тегрирование каждого последующего отклика проходило при нулевых начальных условиях. Раскрывая подинтегральное выражение заметим, что квадратичные члены не зависят от t , и уравнение(-1) принимает вид ct(t)(tr) , ,дд 9(T) ,(t)Uj,(t-C)dt-, т- о )+uJu-C)c3t. функцияФСТ) является аналогом автокор реляционной функции выходного сигнал Она представляет собой функциюбТ сме шенную относительно оси абцисс на величину C(j . Следует иметь ввиду, ч UJt)sintuDot)t(t)-i(t); Uj. (t-T) (t-T)-t(t-t)-i{-t -r), где i(t) - единичная функция; -i-t - единичная функция, сдвинутая относительно 1 (t) на speMH равное длительности входног прямоугольного импульсаJ Ш0 - несущая частота контролируемого объекта. Функция фСТ;) достигает величины опо ного сигнала при 1, при этом t долж но быть меньше длительности отклика от каждого из фронтов входного прямо угольного импульса. Вид функции ФСТ) представлен на фиг. 1. Изменяя длительность прямоугольных импульсов на . (tAl) , подсчитывают число точек совпадения значений функций (С) р заданным величиной опорного сигнал и при определенном их количестве (У|«о)производят замер длительности вход ного прямоугольного импульса (единич ной выборки) . Несущую частоту контролируемого объекта, определенную из единичной выборки, находят из выраженияТ - (H-2)CflJotta().,,, {..4 М . О )л О tl где п - число точек совпадения функцииФСС) в единичной .выборке с с заданным значением опорного сигнала; At - погрешность определения первой и ti -и точки совпадения функции ФСТ) с заданным значением опорного сигнала. Если первая и п -ая точки совпадения определены, например, с погрешностью § 10 , то погрешность опредеЛения TO из единичной выборки при 1 10 будет равна Е 10 . При статистической обработке един 1чных выборок, накапливая их до м 10 , полу.чают уменьшение погрешности в Viir, раз, т.е. погрешность определения периода несущей частоты будет: 6л -fi ., Таким образом, способ обеспечивает высокую точность измерения несущей частоты контролируемого объекта Период несущей частоты колебательного объекта определяется как разность между статистически обработанными единичными выборками, взятыми при максимальной и минимальной длительностях входного прямоугольного сигнала. Такой подход позволяет частично скомпенсировать погрешности квадратирования и неточности установки уровня опорного сигнала. На выходе контролируемого объекта получается полезный сигнал и помеха, т. е. Ct,i;)u(t)+Uj,(t-t)+N|.t), где W(t) - помеха. Тогда автокорреляционная функция суммарного сигнала принимает вид А(С) .(tKUc(t-t)+Nlt)ydt. (а) Функция лЫне связана с изменением длительности входной прямоугольного импульса. Раскрывая подынтегральное выражение уравнения (2), имеем Alt) ttK -tl dlt-v (t)H-Uj;(t-t)J NWolt4 0 v0 jN -tlcIt Первый интеграл - функция ФСС) , второй интеграл - равен нулю, т.к. полезный сигнал и помеха некоррелированы. Третий интегргш не зависит от Т и представляет собой некоторую постоянную величину, Cf на которую функцияфССЬдвигается относительно оси абсцисс, т.е. автокорреляционная функция суммарного сигнала равна сумме
автокорреляционных функций сигнала и помехи А (Т) ф(Т) + А „(Т)
Обычно считают, что A-at с увеличением С быстро убывает и пренебрегают этой величиной. Однако для сигналов малой длительности интервгш их корреляции становится сравнимым с интервалом корреляции помехи и поэтому нельзя пренебрегать членом .
Устройство, peaлизyющeie данный с способ, содержит генератор 1 прямоугольных импульсов, триггер 2, широкополосный усилитель 3, блок 4 квадратирования, интегратор 5, пороговый элемент б и счетчики 7,8 и 9.
Устройство работает следукяцим образом.
С выхода генератора 1 прямоугольных импульсов, входной сигнал подается на контролируемый объект 10. Выходной сигнал контролируемого объекта 10 усиливается широкополосным усилителем 3, квадратируется. блоком 4 квадратирования и интегрируется интегратором 5; на выходе интегратора 5 регистрируется сигнал автокорреляционной функции, который сравнивается пороговым элементом 6 с заданным значением опорного сигнала. Если длительность входного прямоугольного импульса такова, что сигнал на выхо е интегратора 5 достигает значения опорного сигнала, то на выходе порогового элемента 6 появляется импульс, который подается на счетчик 7. Как только счетчик 7 накопит количество импульсов равное п , не его в|лходе появится сигнсш, который поступает на управляющий вход генератора 1 прямоугольных импульсов, инвертируя направление изменения длительности прямоугольного импульса таким образом,что если длительность прямоугольного импульса до этого момента увеличивалась , то она начнет уменьшаться. .
Этот же импульс с выхода счетчика 7, поступая на счетный вход триггера 2, перебросит его, при этом выходной триггер запустит счетчик 8, в котором измеряется и запоминается максимальная величина длительности прямоугольного импульса. При уменьшении длитель ности прямоугольного импульса счетчик 7 будет продолжать накапливать число точек совпадения автокорреляционной функции с заданным значением опорного сигнала и, как только счетчи 7 накопит 2„ импульсов, на его выходе появится .сигнал, который снова изменит направление длительности прямоугольных импульсов. Триггер 2 при этом перебросится и запустит счетчик 9, который измерит минимальную длительность входного прямоугольного импульса и запомнит ее. Этот цикл повторится г раз, и как только счетчик 7 накопит 2п.п, импульсов, появится сигнал, который остановит устройство. При этом счетчик 8 накопит суммарную продолжительность прямоугольных импульсов, максимальных но длительности, а счетчик 9 - суммарную продолжительность прямоугольных импульсов, минимальных по длительности Период несщуей частоты контролируемого объекта 10 определяется как разность показаний счетчиков 8 и 9. Для повторения цикла измерения необходимо подать сбросовый сигнал на соответствующие входы триггера 2 и счетчиков 7,8 и 9.
Способ позволяет с удовлетворительной для /1рактики точностью измерить несущую частоту колебательных объектов с сильно зауленной выходной функцией.
Формула изобретения
Способ измерения несущей частоты колебательных объектов, включающий воздействие на контролируемый объект входным сигнсшом и регистрацию выходного сигнала, отличающийс я тем, что, с целью повышения точности и помехоустойчивости способа, в качестве входного сигнала использу прямоугольный импульс переменной длительности, а выходной сигнал после регистрации квадратируют, интегрируют, сравнивают с опорным сигналом, при выбранном количестве совпадений которого с выходным сигналом измеряют максимальную и минимальную длительность входного прямоугольного импульса переменной длительности, а период несущий частоты определяют по формуле
т - r -i uttQt :i(uoottAt) At
где n - число точек совпадения функц
ф/(г в единичной выборке с заданным значением опорного сигнгшс ;
ФСС)- автокорреляционная функция выхоного сигнала
д-fc- погрешность определения первой и «л-и точки совпадения автокорреляционной функции с заданным значением опорного сигнала. Источники информации,
принятые во внимание при экспертизе
1.Авторское свидетельство СССР 368552, кл. 501Й 23/06, 1970.
2.Авторское свидетельство СССР 541176, кл. S 06 R 15/34, 1975 (прототип).
ipitnc
Фиг.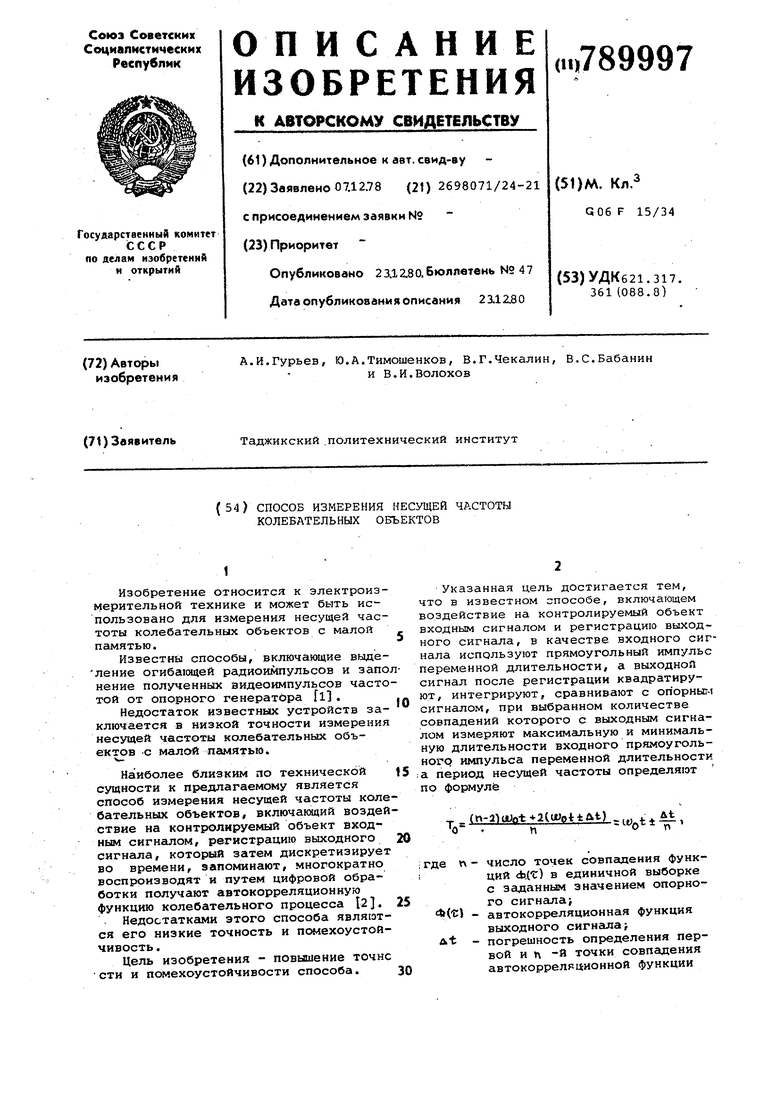
| название | год | авторы | номер документа |
|---|---|---|---|
| Квазикорреляционный анализатор | 1979 |
|
SU790256A1 |
| Способ спектрально-корреляционного обнаружения летательных аппаратов по квазинепрерывным импульсным сигналам бортовых радиоэлектронных систем | 2021 |
|
RU2768370C1 |
| Устройство для измерения корреляционногоОТНОшЕНия дВуХ СлучАйНыХ пРОцЕССОВ | 1979 |
|
SU851420A2 |
| Телемеханическая система | 1987 |
|
SU1424044A1 |
| Демодулятор частотно-манипулированных сигналов | 1982 |
|
SU1137577A1 |
| Способ измерения среднеквадратических значений напряжений произвольной формы и устройство для его осуществления | 1984 |
|
SU1247765A1 |
| Устройство восстановления несущей | 2023 |
|
RU2797823C1 |
| Способ двойного спектрального анализа и взвешенной обработки квазинепрерывных сигналов при отсутствии априорных сведений об их параметрах | 2024 |
|
RU2838368C1 |
| Устройство для измерения времени установления выходного сигнала цифро-аналоговых преобразователей | 1985 |
|
SU1298916A1 |
| Радиоимпульсный фазометр | 1982 |
|
SU1081561A1 |