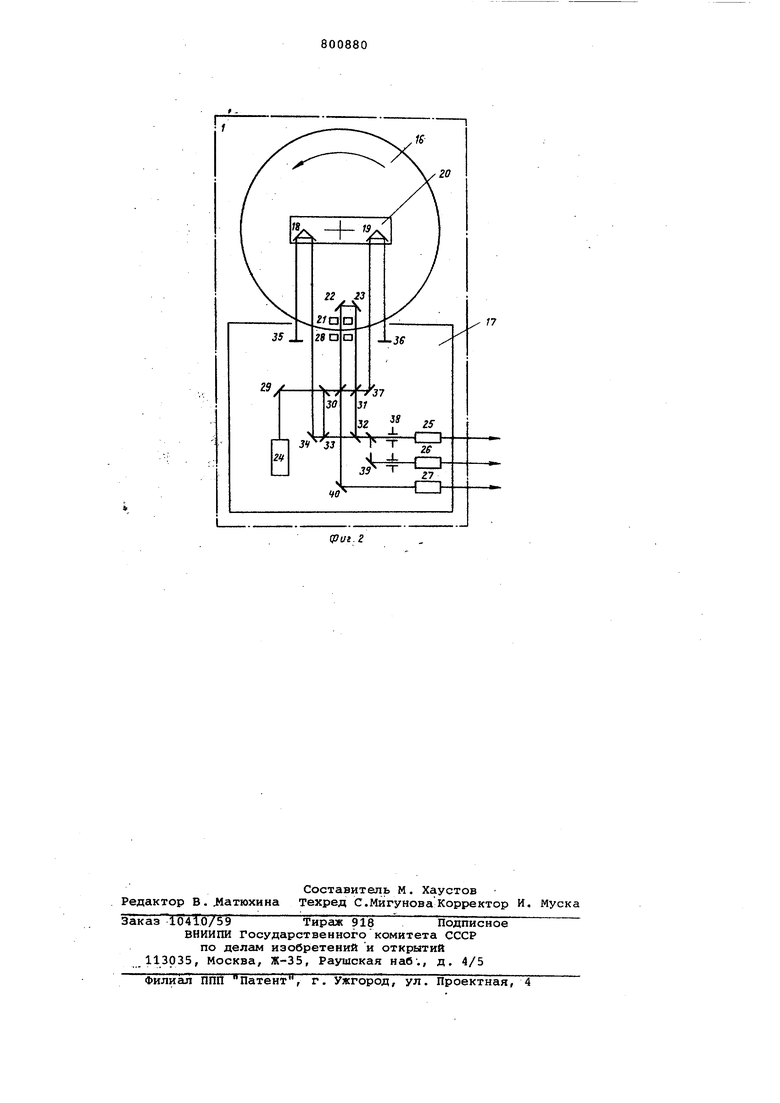
(54) УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАЛЫХ УГЛОВЫХ СКОРОСТЕЙ импульсов подключен к выходу второго реверсивного счетчика, а его выход подключен ко входам второго элемента ИЛИ и с первыми входами блока сов падения, вторые входы которого подключены к выходам счетчика дополнительных импульсов. На фиг. 1 представлена блок-схема предлагаемого устройства; на фиг.2 схема лазерного интерферометра. Устройство для измерения малых уг ловых скоростей состоит из лазерного интерферометра 1, датчика 2 разрешения начала отсчета,блока 3 обработки сигналов, первого реверсивного счетчика 4 угла блока 5 управления, блока 6 регистрации, второго реверсивного счетчика 7 угла, распределителя 8 импульсов, блока 9 совпадения счетчика 10 дополнительных импульсов линии 11 задержки, элемента И 12, первого элемента ИЛИ 13, триггера 14 и второго элемента ИЛИ 15 . Лазерный интерферометр 1 состоит из подвижной части 16, установленной на объекте, скорость которого измеряется, и неподвижной части 17. Основными элементами подвижной части лазерного интерферометра являются угловые зеркала 18 и 19, установленные на отражателе 20, диафрагма 21 и зеркала 22 и 23. Основными элементами неподвижной части лазерного интерферометра являются источник света - лазер 24 , три фотоприемника 25-27, диафрагма 28 и система зеркал 9-40. Устройство работает следующим образом. В лазерном интерферометре сначала с помощью источника света - лазера 24и системы зеркеш пропорционально углу поворота формируется движение интерференционных палое, которые далее с помошью двух фотоприемников 25и 26 преобразуются в сигналы изменения тока, в одном - по закону синуса угла поворота, в другом - по закону косинуса угла поворота. Сигналы с этих фотоприемников поступают в блок 3 обработки сигналов. Для автоматического запуска от исходного положения интерферометра служит датчик разрешения начала отсчета, соетоящий из фотоприемника 27 и системы зеркал 31, 32, 22 и 40, а также подвижной диафрагмы 21 и неподвижной диафрагмы 28. Датчик разрешения отсчета форлдарует сигнал в виде одиночного импульса в блок 3 обработки сигналов,разрешая тем самым прохождение импульсов интерференционных полос в этот блок от фотоприемников Преобразованные:импульсы с выхода: блока 3 поступают через элемент ИЛИ на реверсивный счётчик 4, линию 11 задержки и реверсивный счетчик 7, ем кость которого меньше емкости реверсивного счетчика 4 в п раз (п -цело число) и соответствует прохождению такого количества импульсов, при котором погрешность определения угла поворота, обусловленная нелинейной зависимостью между углом поворота и количеством прошедших интерференционных полос, не превышает+1 угл .с при крайних положениях выбранного диапазона измерений. Счетчик 7 производит непрерывный отсчет заданного количества импульсов и после каждого отсчета формирует импульс, который поступает на выход распределителя 8. С выходов распределителя импульсы поступают в блок 9 сравнения и через элемент ИЛИ 13 на первый, вход триггера 14. в блоке сравнения с помощью каждого импульса, поступающего с выхода распределителя, формируется код числа дополнительных импульсов, необходимых для компенсации погрешности угла поворота. При поступлении первого импульса с выхода распределителя на первый вход триггера 14 на выходе триггера появляется положительный потенциал, который открывает элемент И 12. Задержанные по времени линией 11 задержки импульсы (относительно импульсов на выходе блока 3) проходят через элемент И 12 на счетчик 10 дополнительных импульсов и через элемент ИЛИ 15 на реверсивный счетчик 4 . Счетчик 10 считает импульсы до момента совпадения с кодом числа блока 9. В момент совпадения заданного числа с выхода блока 9 на второй вход триггера 14- и второй вход счетчика 10 поступают импульсы, при этом закрывается элемент И 12 и сбрасывается в ноль счетчик 10. При поступлении на первый вход триггера 14 и вход блока совпадения следующего импульса цикл повторяется, при этом каждому импульсу соответствует свой определенный код числа в блоке совпадения, необходимый для компенсации погрешности на соответствующем угле поворота. Таким образом, с момента начала измерения с выхода блока 3 импульсы поступают на первый элемент ИЛИ 15, на второй вход которого поступают дополнительные импульсы, компенсирующие -йогрешность измерения. С выхода схемы ИЛИ 15 импульсы поступают на реверсивный счетчик 4, где формируется необходимый программный угол, величина которого выбирается в зависимости от величины скорости и времени ее осреднения. В блоке 5 управления Производится измерение времени прохождения з аданного количества импульсов угла. Регистрация результатов измерений производится блоком б регистрации сигналов. - Погрешность измерения скорости вращения, зависит от погрешности ,. измерения угла поворота и в значительной мере меньше от измерения времени, поэтому погрешность измерения вр мени можно пренебречь . Тогда абсолют ная погрешность измерения скорости вращения равна где 4ОС- погрешность измерения угла поворота; t - время измерения. Исходя из того, что цена импульсо (в угловом выражении) на выходе бло ка обработки сигналов равна 0,1 угл погрешность измерения скорости вращения равна ()л гдеЛОС- угловая погрешность, завися щая от нелинейности интерферометра (устраняется путем подачи дополнительных иьшуль сов). Формула изобретения Устройство для измерения малых-уг ловых скоростей, содержащее лазерный интерферометр с датчиком разрешения начала отсчета, блок обработки сигна лов, вход которого соединен с лазерным интерферометром, а первый выход подключен к первому входу блока управления, соединенного своим вторым входом с выходом первого реверсивног счетчика угла, а выход - с блоком
eet.t регистрации, отличающееся тем, что, с целью повышения точности измерения, в него введены второй реверсивный счетчик угла, распределитель импульсов, блок совпадения, счетчик дополнительных импульсов, линия задержки, два элемента ИЛИ, триггер и элемент И, при этом второй выход блока обработки сигналов соединен со входом второго реверсивного счетчика угла, со входом линии задержки и первым входом первого элемента ИЛИ, второй вход которого подключен к выходу элемента И и первому входу счетчика дополнительных импульсов, а выход - ко входу первого реверсивного счетчика угла, первый вход .элемента И соединен с выходом линии задержки , а второй - с выходом триггера, первый вход которого подключен к выходу второго элемента ИЛИ, а второй - к выходу блока совпсщения и второму входу счетчика дополнительных импульсов, вход распределителя импульсов соединен с выходом второго реверсивного счетчика, а его выходы подключены ко входам второго элемента ИЛИ и к первым входам блока совпадения, вторые входы которого соединены с выходами счетчика дополнительных импульсов, Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 485383, кл. С 01 Р 3/36, 1973. 2.Авторское свидетельство СССР № 476511, кл. С 01 Р 3/68, 1973 (прототип) .
17

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения малых угловых скоростей | 1972 |
|
SU476511A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ ОБЪЕКТА | 2015 |
|
RU2601530C1 |
| Вычислительное устройство для измерителей перемещений | 1975 |
|
SU553620A1 |
| ЛАЗЕРНЫЙ ДАТЧИК УЛЬТРАЗВУКОВЫХ КОЛЕБАНИЙ | 1992 |
|
RU2036415C1 |
| Интерференционное устройство для измерения линейных перемещений объекта | 1989 |
|
SU1670409A1 |
| Фазометр | 1990 |
|
SU1765782A1 |
| Устройство для измерения линейных перемещений объекта | 1989 |
|
SU1740992A1 |
| Вычислительное устройство для определения дробных долей и целого числа полос интерференция | 1977 |
|
SU734749A1 |
| Устройство для измерения геометрических параметров поверхности | 1986 |
|
SU1350498A1 |
| Преобразователь амплитуды импульсов в код | 1980 |
|
SU949810A1 |