(54) ЭЛЕКТРОИНДУКЦИОННЫЙ АППАРАТ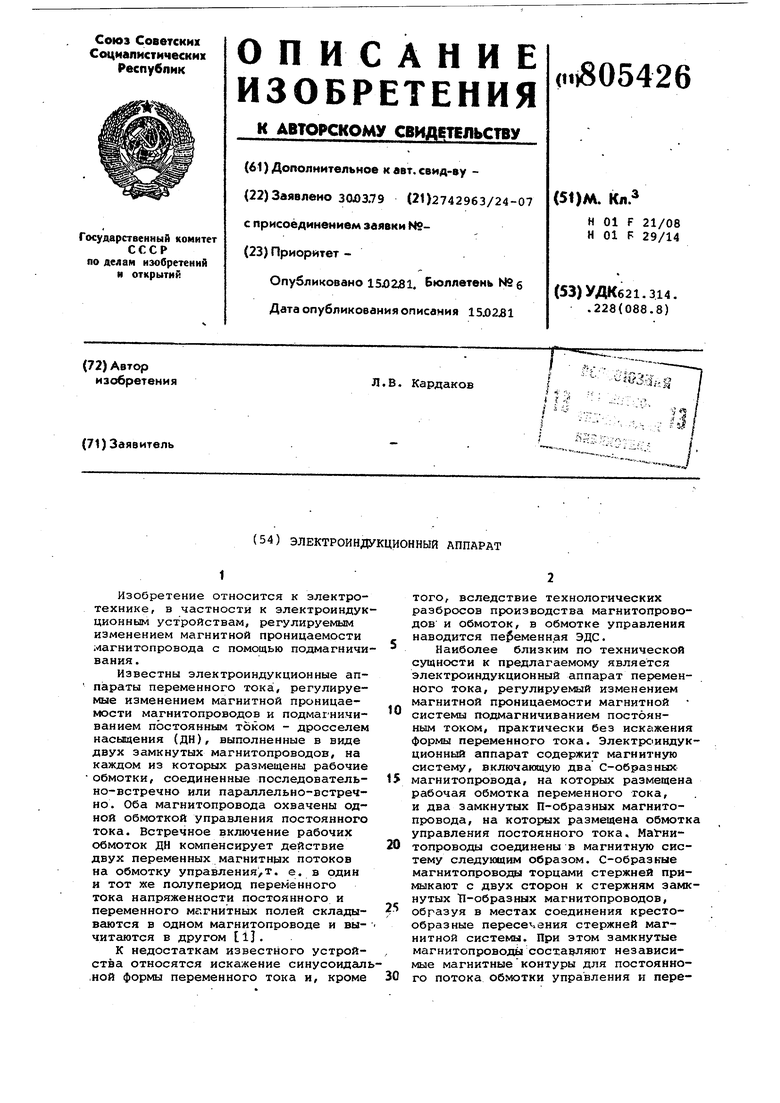
| название | год | авторы | номер документа |
|---|---|---|---|
| Управляемый трансформатор | 1980 |
|
SU877631A1 |
| Управляемый трансформатор | 1980 |
|
SU877632A1 |
| Индуктивное устройство | 1973 |
|
SU520634A1 |
| Трехфазное регулируемое трансформаторное устройство (его варианты) | 1980 |
|
SU951427A1 |
| Электроиндукционное устройство | 1983 |
|
SU1164795A1 |
| Параметрический ортогонально-потоковый трансформатор с положительной обратной связью | 2020 |
|
RU2740003C1 |
| Электротрансформатор для работы в резонансном режиме, а также в составе статора электрогенератора | 2021 |
|
RU2770049C1 |
| Параметрический ортогонально-потоковый трансформатор | 2020 |
|
RU2732487C1 |
| ЭЛЕКТРИЧЕСКИЙ ГЕНЕРАТОР | 2012 |
|
RU2505916C2 |
| ТРЕХСТЕРЖНЕВОЙ ОДНОФАЗНЫЙ МАГНИТНЫЙ УСИЛИТЕЛЬ С ЗАЩИТОЙ ОТ ПРОНИКНОВЕНИЯ ПЕРЕМЕННОГО НАПРЯЖЕНИЯ В ЦЕПЬ УПРАВЛЕНИЯ | 2013 |
|
RU2522999C1 |
Изобретение относится к электротехнике, в частности к электроиндукционным устройствам, регулируемым изменением магнитной проницаемости агнитопровода с помощью подмагничивания.
Известны электроиндукционные аппараты переменного тока, регулируемые изменением магнитной проницаемости магнитопроводов и подмаг-ничиванием постоянным током - дросселем насыщения (ДН), выполненные в виде двух замкнутых магнитопроводов, на каждом из которых размещены рабочие обмотки, соединенные последовательно-встречно или параллельно-встречно. Оба магнитопровода охвачены одной обмоткой управления постоянного тока. Встречное включение рабочих обмоток ДН компенсирует действие двух переменных магнитных потоков на обмотку управления,т. е. в один и тот же папупериод переменного тока напряженности постоянного и переменного магнитных полей складываются в одном магнитопроводе и вы- читаются в другом 1.
К недостаткам известного устройства относятся искажение синусоидаль.ной формы переменного тока и, кроме
того, вследствие технологических разбросов производства магнитопроводов и обмоток, в обмотке управления наводится переменная ЭДС.
Наиболее близким по технической сущности к предлагаемому является электроиндукционный аппарат переменного тока, регулируемый изменением магнитной проницаемости магнитной
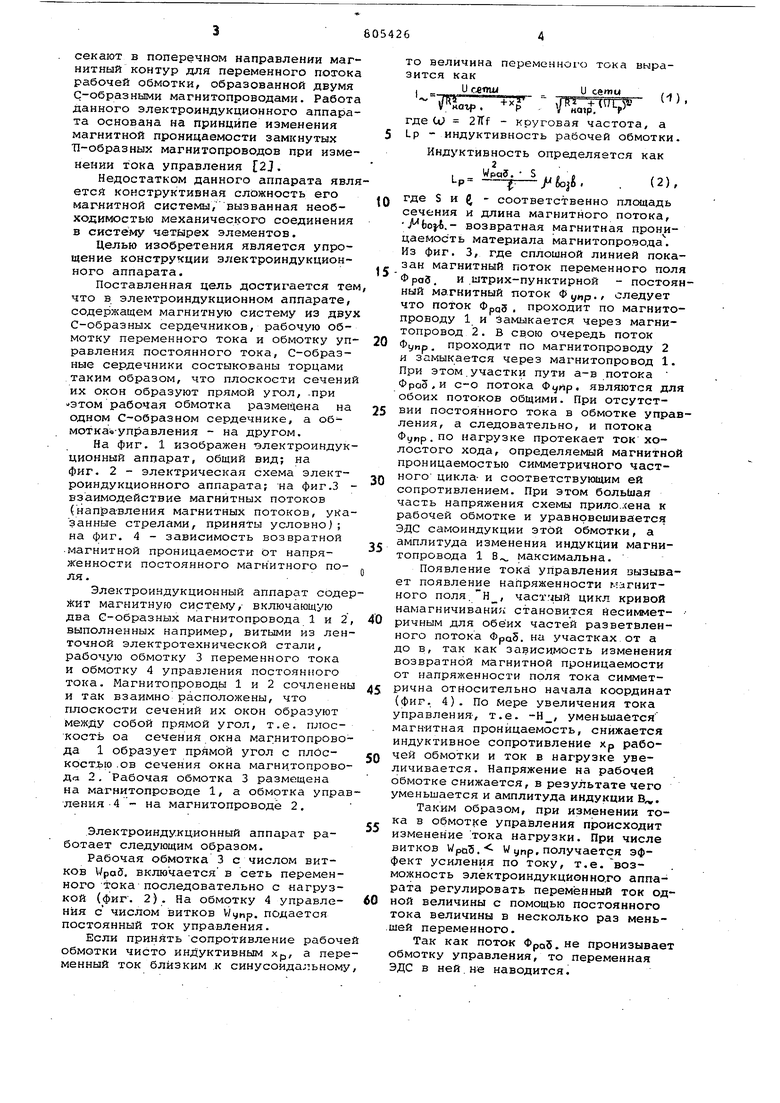
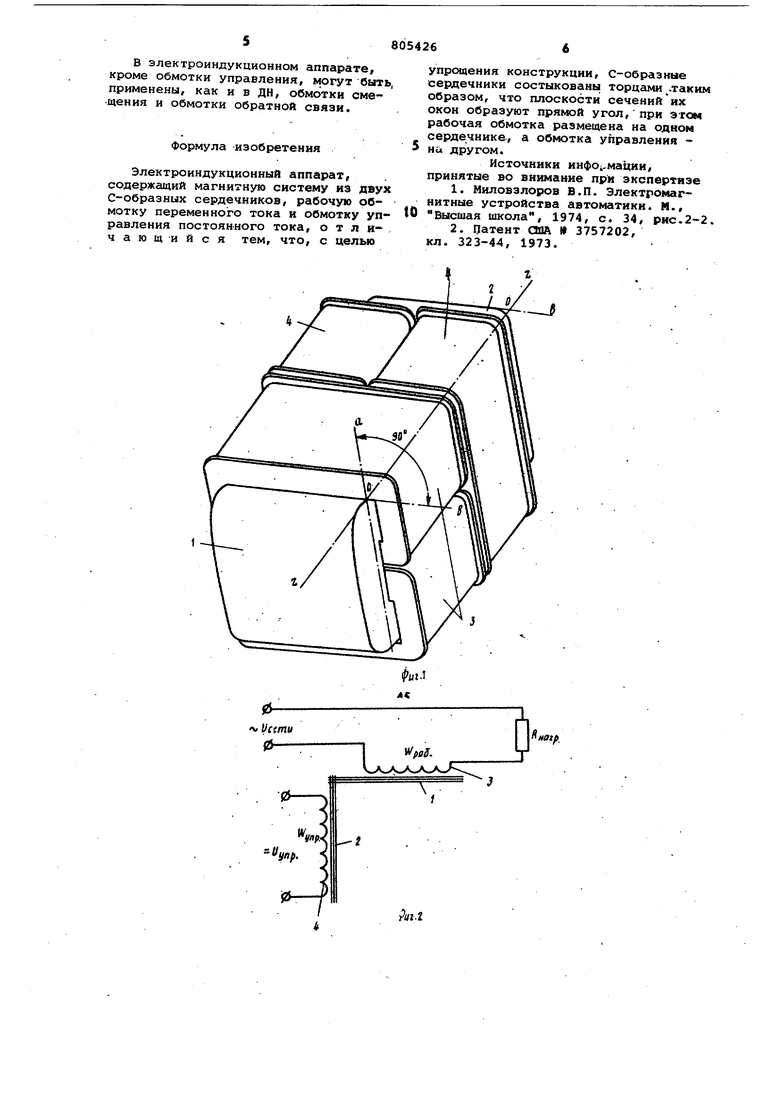
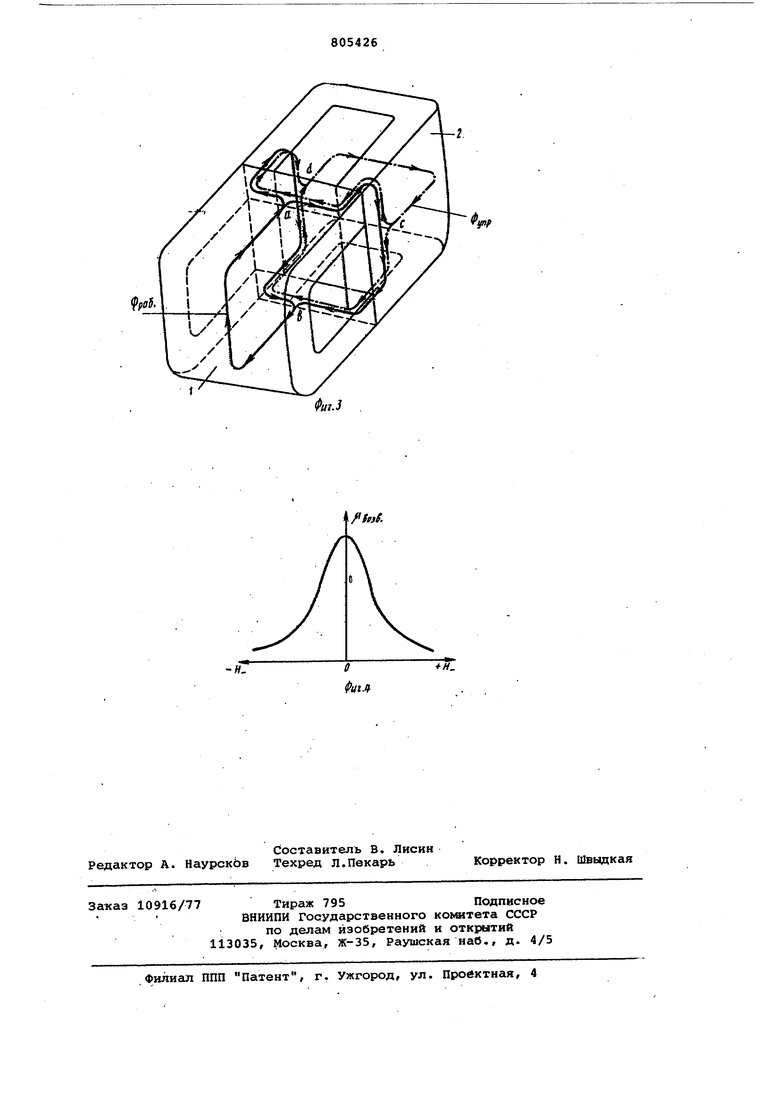
0 системы подмагничиванием постоянным током, практически без искс1жения формы переменного тока. Электроиндукционный аппарат содержит магнитную систему, включающую два с-обраэных 5 магнитопровода, на которых размещена рабочая обмотка переменного тока, и два замкнутых П-образных магнитопровода, на которых размещена обмотка управления постоянного тока, Ма1гни0топроводы соединены в магнитную систему следующим образом, с-образкые магнитопроводы торцс1мй стержней примыкают с двух сторон к стержням замкнутых Т1-образных магнитопроводов, обгазуя в местах соединения крестообразные пepece.вния стержней магнитной системы. При этом замкнутые магнитопроводы состаэляют независимые магнитные контуры для постоянного потока обмотки управления и пере0секают в поперечном направлении маг нитный контур для переменного поток рабочей обмотки, образованной двумя С-образными магнитопроводами. Работ данного электроиндукционного аппара та основана на принципе изменения магнитной проницаемости замкнутых ТТ-образных магнитопроводов при изме нении тока управления 2J. Недостатком данного аппарата явл ется конструктивная сложность его магнитной систеьФл, вызванная необходимостью механического соединения в систему четырех элементов. Целью изобретения является упрощение конструкции электроиндукционного аппарата. Поставленная цель достигается те что в электроиндукционном аппарате, содержащем магнитную систему из дву С-образных сердечников, рабочую обмотку переменного тока и обмотку уп равления постоянного тока, С-образные сердечники состыкованы торцами таким образом, что плоскости сечени их окон образуют прямой угол, -при ЭТОМ рабочая обмотка размещена на одном С-образном сердечнике, а обмотка«-управления - на другом. На фиг. 1 изображен гэлектроиндук ционный аппарат, общий вид; на фиг. 2 - электрическая схема электроиндукционного аппарата; на фиг.З взаимодействие магнитных потоков (направления магнитных потоков, ука занные стрелами, приняты условно}; на фиг. 4 - зависимость возвратной магнитной проницаемости- от напряженности постоянного магнитного поля. Электроиндукционный аппарат соде жит магнитную систему,- включающую два С-образных магнитопровода 1 и 2 выполненных например, витыми из лен точной электротехнической стали, рабочую обмотку 3 переменного тока и обмотку 4 управления постоянного тока. Магнитопроводы 1 и 2 сочленен и так взаимно расположены, что плоскости сечений их окон образуют между собой прямой угол, т.е. плоскость оа сечения окна магнитопрово да 1 образует прямой угол с плоскостью .ов сечения окна магнитопрово да 2, Рабочая обмотка 3 размещена на магнитопроводе 1, а обмотка упра ления -4 - на магнитопроводе 2. Электроинду.кционный аппарат работает следующим образом. Рабочая обмотка 3 с числом витков Wpa5, включается в сеть переменного тока последовательно с нагрузкой (фиг. 2). На обмотку 4 управленйя с числом витков V/ подается постоянный ток управления. Если принять сопротивление рабоч обмотки чисто индуктивным Хр, а пер менный ток близким .к синусоидальном то величина переменного тока выразится как , и c rnwи сети уП ИагрТ . rW где U) 27rf - круговая частота, а LP - индуктивность рабочей обмотки. Индуктивность определяется как I - Wpqg. S ..ftf Up-j-/«Цб. . (2), где S и - соответственно плсяцадь сечения и длина магнитного потока, .- возвратная магнитная проницаемость материала магнитопровода. Из фиг. 3, где сплошной линией показан магнитный поток переменного поля Фраз. И .штрих-пунктирной - постоянный магнитный поток Фуир., следует что поток ФраЗ , проходит по магнитопроводу 1 и замыкается через магнитопровод 2. В свою очередь поток Фуир. проходит по магнитопроводу 2 и замыкается через магнитопровод 1. При этом.участки пути а-в потока ФраЗ.и с-о потока Фупр. являются для обоих потоков общими. При отсутствии постоянного тока в обмотке управления, а следовательно, и потока Фупр.по нагрузке протекает ток холостого хода, определяемый магнитной проницаемостью симметричного частного цикла- и соответствующим ей сопротивлением. При этом большая часть напряжения схемы прило.хена к рабочей обмотке и уравновешивается ЭДС самоиндукции этой обмотки, а амплитуда изменения индукЦии магнитопровода 1 В максимальна. Появление тока управления зызывает появление напряженности магнитного поля.Н, частшй цикл кривой намагничивания становится йесикмет- ричным для обеих частей разветвленного потока Фра5. на участках от а до в, так как зависимость изменения возвратной магнитной проницаемости от напряженности поля тока симметрична относительно начала координат (фиг. 4). По Мере увеличения тока управления, т.е. -Н, уменьшается магн-итная проницаемость, снижается индуктивное сопротивление Хр рабочей обмотки и ток в нагрузке увеличивается. Напряжение на рабочей обмотке снижается, в результате чего уменьшается и амплитуда индукции В. Таким образом, при изменении тока в обмотке управления происходит изменение тока нагрузки. При числе витков WpoS. W упр. получается эффект усиления по току, т.е. возможность электроиндукционно.го аппа-рата регулировать переменный ток одной величины с помощью постоянного тока величины в несколько раз меньшей переменного. Так как поток Фра5. не пронизывает обмотку управления, то переменная ЭДС в ней.не наводится.
В электроиндукционном аппарате, кроме обмотки управления, могут быть, применены, как и в ДН, обмотки смещения и обмотки обратной связи.
Формула изобретения
Электроиндукционный аппарат, содержащий магнитную систему из двух С-образных сердечников, рабочую обмотку переменного тока и обмотку управления постоянного тока, отличающийся тем, что, с целью
упрощения конструкции, С-образные сердечники состыкованы торцами .таким образом, что плоскости сечений их окон образуют прямой угол, при этом рабочая обмотка размещена на одном сердечнике, а обмотка управления на другом.
Источники инфО1.мации, принятые во внимание при экспертизе
-Н.
.
