(54) УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО КОНТРОЛЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для приема и передачи команд | 1986 |
|
SU1325543A1 |
| Устройство для контроля и сигнализации | 1982 |
|
SU1059596A1 |
| Устройство для дистанционного управления двухпозиционным объектом | 1980 |
|
SU883949A1 |
| Система дистанционного управления нагрузкой по силовой линии | 1988 |
|
SU1669046A1 |
| СЕТЬ НАРУЖНОГО ОСВЕЩЕНИЯ | 1988 |
|
RU2025911C1 |
| Устройство для дистанционного управления и контроля двухпозиционных объектов | 1984 |
|
SU1228134A1 |
| Система наружного освещения | 1988 |
|
SU1721847A1 |
| Устройство для дистанционного управления | 1983 |
|
SU1129639A1 |
| Устройство для дистанционного управления двухпозиционным объектом | 1983 |
|
SU1096679A1 |
| Система управления и контроля трехфазных сетей наружного освещения с каскадным включением | 1983 |
|
SU1136256A1 |
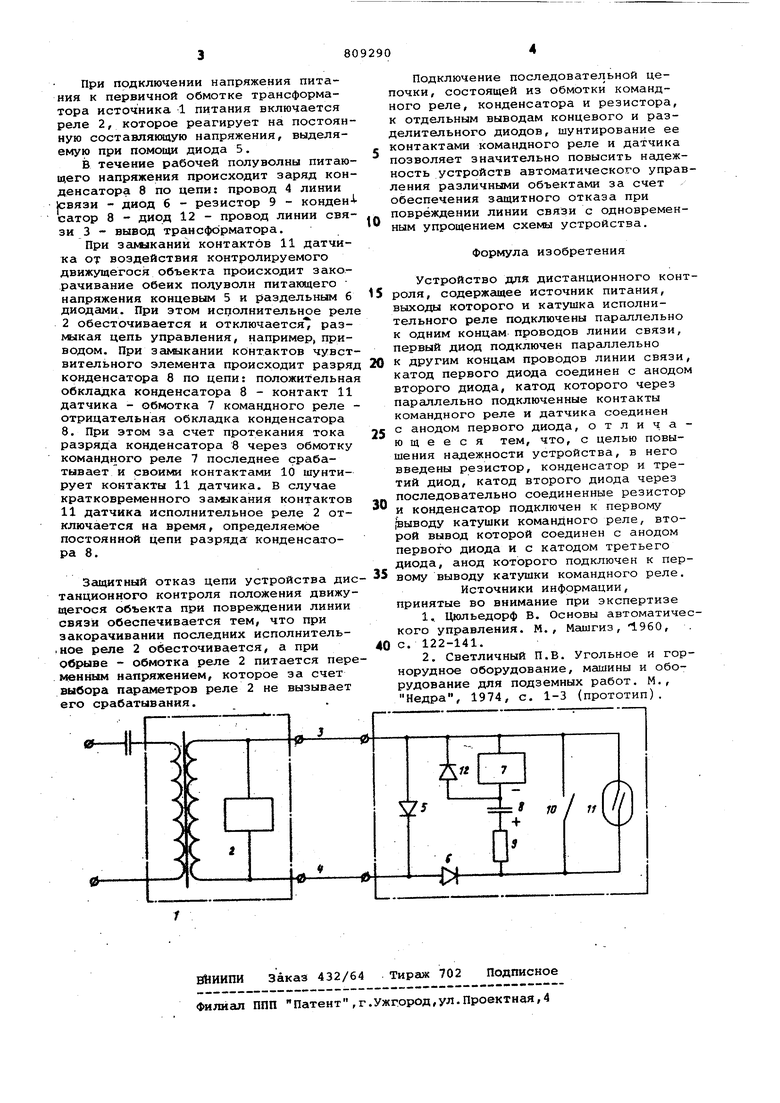
Изобретение относится к телемеханике и предназначено для .дистанционного управления электрическими аппаратами и может быть использовано, например, при управлении электрическим приводом подвижных машин. Известны устройства дистанционно контроля положения движущегося объекта, у которых контакты включены последовательно или параллельно с исполнительным элементом, при это в первом случае отклонение производится размыканием контактов, а во втором - шунтированием исполнительного элемента 111. Недостатком известных устройств является отсутствие защитного отказ при повреждении линии связи. Наиболее близким по технической сущности к предлагаемому является устройство для дистанционного контроля, содержащее источник питания, выходы которого и катушка исполните ного реле подключены парашлельно к одним концам проводов линии связи первый диод подключен параллельно к другим концам проводов линии связи, катод первого диода соедииеи с анодом второго диода, катод которого через пapeLrtлeльнo подключенные контакты командного репе и датчика соединен с анодом первого диода 12. Недостатком известного устройства является низкая надежность. Цель изобретения - повышение надежности. Поставленная цель достигается тем, что в устройство введены резистор, конденсатор и третий диод, катод второго диода через последовательно соединенные резистор и конденсатор подключен к первому выводу катушки командного реле, второй вывод которой соединен с анодом первого диода и с катодом третьего диода, аыод которого подключен к первс 4у выводу катушки командного реле. ,J На чертеже изображена схема предлагаемого устройства. Устройство содержит источник 1 питания, исполнительиое реле 2, провода 3 и 4 линии связи, первый диод 5, второй диод 6, катушку 7 командного реле, конденсатор 8, резистор 9, контакт 10 командного реле, контакт 11 датчика, третий диод 12. Устройство работает следующим образом.
При подключении напряжения питания к первичной обмотке трансформатора источ:ника -1 питания включается реле 2, которое реагирует на постоянную составляющую напряжения, выделяемую при помощи диода 5.
В течение рабочей полуволны питающего напряжения происходит заряд конденсатора 8 по цепи: провод 4 линии )свяэи - диод 6 - резистор 9 - кoндeнсатор 8 - диод 12 - провод линии связи 3 - вывод трансформатора.
При закыканий контактов 11 датчика от воздействия контролируемого движущегося объекта происходит закорачивание обеих полуволн питающего напряжения концевым 5 и раздельным 6 диодами. При зтом исполнительное реле 2 обесточивается и отключается раз№1кая цепь управления, например, приводом. При за№лкании контактов чувствительного элемента происходит разряд конденсатора 8 по цепи; положительная обкладка конденсатора 8 - контакт 11 датчика - обмотка 7 командного реле отрицательная обкладка конденсатора 8. При этом за счет протекания тока разряда конденсатора 8 через обмотку командного реле 7 последнее срабатывает и своиьет контактами 10 шунтирует контакты 11 датчика. В случае кратковременного замыкания контактов 11 датчика исполнительное реле 2 отключается на время, определяемое постоянной цепи разряда конденсатора 8.
Защитный отказ цепи устройства дистанционного контроля положения движущегося объекта при повреждении линии связи обеспечивается тем, что при закорачивании последних исполнитель.ное реле 2 обесточивается, а при обрыве - обмотка реле 2 питается переменным напряжением, которое за счет выбора параметров реле 2 не вызывает его срабатывания.
Подключение последовательной цепочки, состоящей из обмотки командного реле, конденсатора и резистора, к отдельным выводам концевого и разделительного диодов, шунтирование ее контактами командного реле и датчика позволяет значительно повысить надежность устройств автоматического управления различными объектами за счет обеспечения защитного отказа при повреждении линии связи с одновременным упрощением схемы устройства.
Формула изобретения
Устройство для дистанционного контроля, содержсццее источник питания, выходы которого и катушка исполнительного реле подключены параллельно к одним концам проводов линии связи, первый диод подключен параллельно к другим концам проводов линии связи, катод первого диода соединен с анодом второго диода, катод которого через параллельно подключенные контакты командного реле и датчика соединен с анодом первого диода, отличающееся тем, что, с целью повышения надежности устройства, в него введены резистор, конденсатор и третий диод, катод второго диода через последовательно соединенные резистор и конденсатор подключен к первому {выводу катушки командного реле, второй вывод которой соединен с анодом первого диода и с катодом третьего диода, анод которого подключен к первому выводу катушки командного реле.
Источники информации, принятые во внимание при экспертизе
1,Цюльедорф В. Основы автоматического управления. М. , Машгиз , -1960, .
0 с. 122-141.
