(54) УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ИЗМЕРЕНИЯ УГЛОВ
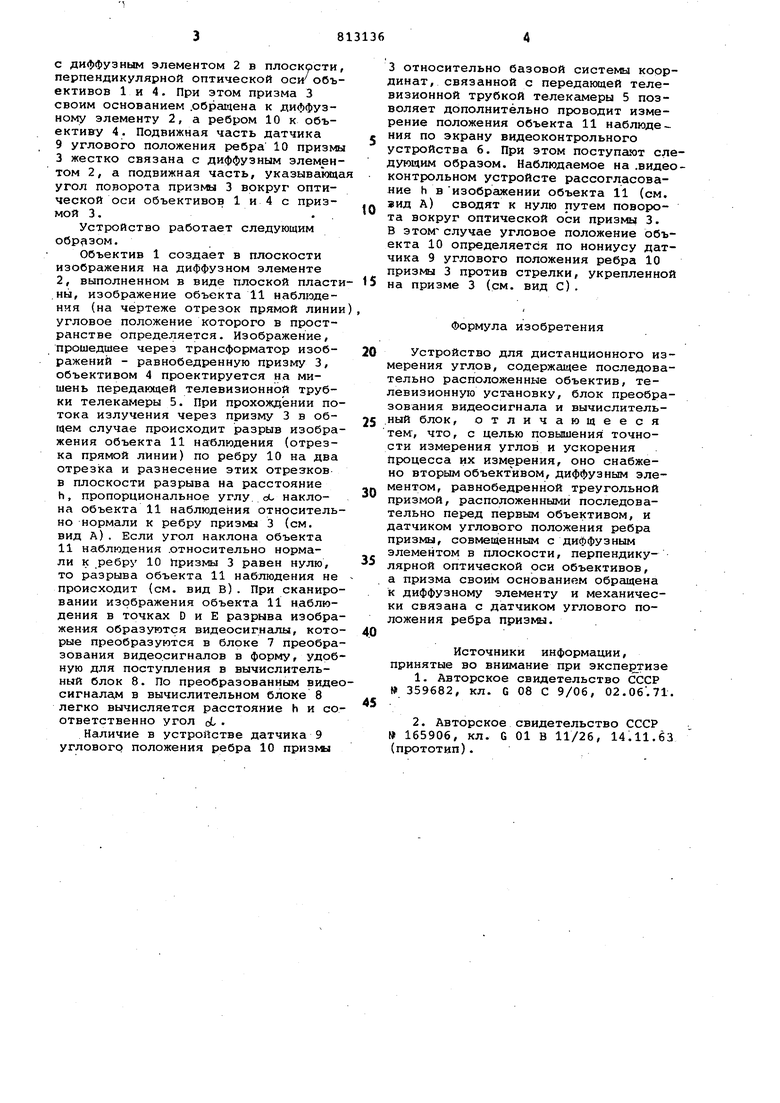
с диффузным элементом 2 в плоскости, перпендикулярной оптической оси объективов 1 и 4. При этом призма 3 своим основанием .обращена к диффузному элементу 2, а ребром 10 к объективу 4. Подвижная часть датчика 9 углового положения ребра 10 призмы 3 жестко связана с диффузным элементом 2, а подвижная часть, указывагада угол поворота призмы 3 вокруг оптической оси объективов 1 и 4 с призмой 3.. .
Устройство работает следующим .
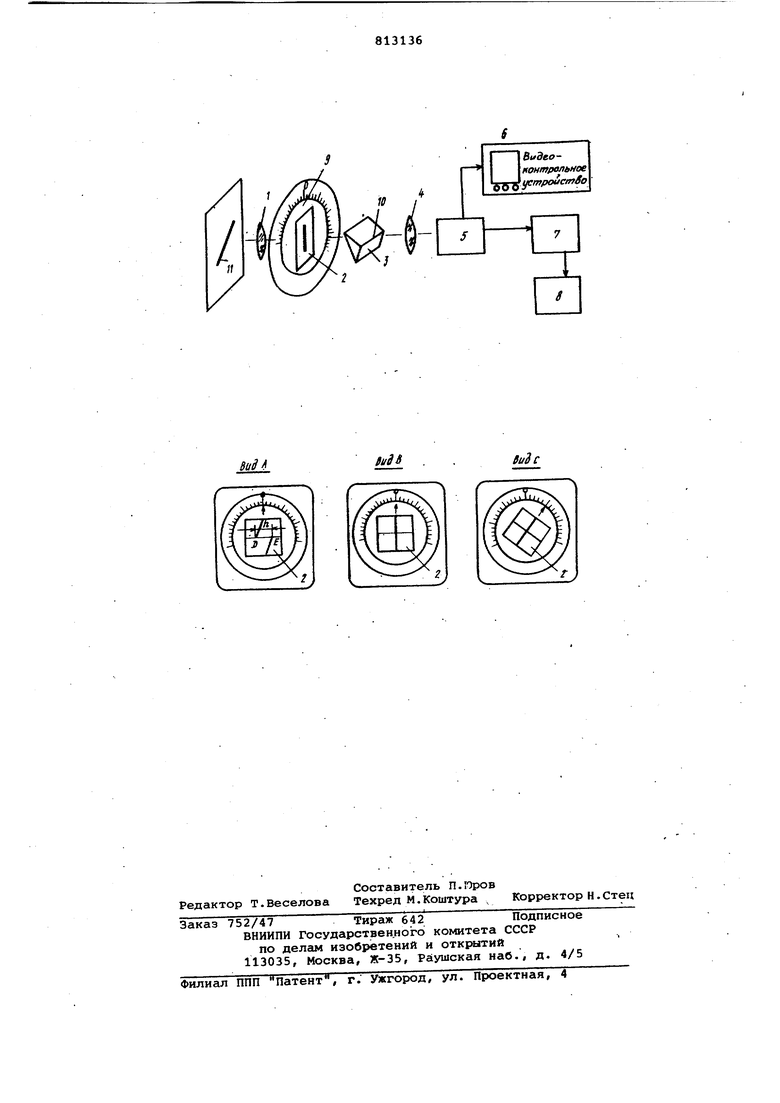
Объектив 1 создает в плоскости изображения на диффузном элементе 2, выполненном в виде плоской пластины, изображение объекта 11 наблюдения (на чертеже отрезок прямой линии угловое положение которого в пространстве определяется. Изображение, прошедшее через трансформатор изображений - равнобедренную призму 3, объективом 4 проектируется на мишень переданхцей телевизионной трубки телекамеры 5. При прохождении потока излучения через призму 3 в общем случае происходит разрыв изображения объекта 11 наблюдения (отрезка прямой линии) по ребру 10 на два отрезка и разнесение этих отрезков в плоскости разрыва на расстояние h, пропорциональное углу, ou наклона объекта 11 наблюдения относительно нормали к ребру призмы 3 (см. вид А). Если угол наклона объекта 11 наблюдения .относительно нормали к ребру 10 Призмы 3 равен нулю, то разрыва объекта 11 наблюдения не происходит (см. вид в). При сканировании изображения объекта 11 наблюдения в точках D и Е разрыва изображения образуются видеосигнгшы, которые преобразуются в блоке 7 преобразования видеосигналов в форму, удобную для поступления в вычислительный блок 8. По преобразованным видеосигнала в вычислительном блоке 8 легко вычисляется расстояние h и соответственно угол oL
Наличие в устройстве датчика 9 углового положения ребра 10 призмы
3 относительно базовой системы координат, связанной с передающей телевизионной трубкой телекамеры 5 позволяет дополнительно проводит измерение положения объекта 11 наблюдения по экрану видеоконтрольного устройства 6. При этом поступают следующим образом. Наблюдаемое на .видеоконтрольном устройсте рассогласование h в изобргикении объекта 11 (ом. гид А) сводят к нулю путем поворота вокруг оптической оси призмь 3. В ЭТОМ случае угловое положение объекта 10 определяется по нониусу датчика 9 углового положения ребра 10 призмы 3 против стрелки, укрепленной на призме 3 (см. вид С).
Формула изобретения
Устройство для дистанционного измерения углов, содержащее последовательно расположенные объектив, телевизионную установку, блок преобразования видеосигнала и вычислитель.ный блок, отличающееся тек, что, с целью повышения точности измерения углов и ускорения процесса их измерения, оно снабжено вторым объективом, диффузным элементом, равнобедренной треугольной призмой, расположенными последовательно перед первым объективом, и датчиком углового положения ребра призмы, совмещенным с диффузным элементом в плоскости, перпендикулярной оптической оси объективов, а призма своим основанием обращена к диффузному элементу и механически связана с датчиком углового положения ребра призмы.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР
359682, кл. G 08 С 9/06, 02.06.71
2.Авторское свидетельство СССР
165906, кл. G 01 В 11/26, 14.11.63 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛАЗЕРНЫЙ ЦЕНТРАТОР ДЛЯ РЕНТГЕНОВСКОГО ИЗЛУЧАТЕЛЯ | 1996 |
|
RU2136124C1 |
| ЛАЗЕРНЫЙ ЦЕНТРАТОР ДЛЯ РЕНТГЕНОВСКОГО ИЗЛУЧАТЕЛЯ | 2000 |
|
RU2179789C2 |
| ПОДВОДНОЕ ВИДЕОКРЫЛО | 2007 |
|
RU2332328C1 |
| ТЕЛЕВИЗИОННО-ЛАЗЕРНЫЙ ВИЗИР-ДАЛЬНОМЕР | 2012 |
|
RU2515766C2 |
| ЛАЗЕРНЫЙ ЦЕНТРАТОР ДЛЯ РЕНТГЕНОВСКОГО ИЗЛУЧАТЕЛЯ | 2003 |
|
RU2237984C1 |
| Поляровизор | 1989 |
|
SU1656343A1 |
| ЛАЗЕРНЫЙ ЦЕНТРАТОР ДЛЯ РЕНТГЕНОВСКОГО ИЗЛУЧАТЕЛЯ | 2002 |
|
RU2237983C2 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ СТЕРЕОТЕЛЕВИЗИОННОГО ИЗОБРАЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 1991 |
|
RU2030119C1 |
| СПОСОБ КРУГОВОГО ОБЗОРА МАТРИЧНЫМ ФОТОПРИЕМНЫМ УСТРОЙСТВОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2445644C2 |
| ЛАЗЕРНЫЙ АВТОКОЛЛИМАЦИОННЫЙ ЦЕНТРАТОР ДЛЯ РЕНТГЕНОВСКОГО ИЗЛУЧАТЕЛЯ | 2002 |
|
RU2224243C1 |
Ч X
