(54) ИНДУКТИВНЫЙ ДВУХПОЛЮСНИК
| название | год | авторы | номер документа |
|---|---|---|---|
| Индуктивный двухполюсник | 1979 |
|
SU813697A1 |
| Индуктивный двухполюсник | 1979 |
|
SU813696A1 |
| Активный перестраиваемый -фильтр | 1975 |
|
SU560320A1 |
| Индуктивный двухполюсник | 1976 |
|
SU633138A1 |
| Магнитоэлектронный индуктивный элемент | 1984 |
|
SU1224838A1 |
| УСТРОЙСТВО ЭКСПРЕСС-КОНТРОЛЯ МАГНИТНЫХ ХАРАКТЕРИСТИК ЛИСТОВОЙ ЭЛЕКТРОТЕХНИЧЕСКОЙ СТАЛИ | 2014 |
|
RU2551639C1 |
| ШИРОКОПОЛОСНОЕ МНОГОКАНАЛЬНОЕ ПЬЕЗОЭЛЕКТРИЧЕСКОЕ ФИЛЬТРУЮЩЕЕ УСТРОЙСТВО | 2005 |
|
RU2296418C1 |
| Индуктивный двухполюсник | 1982 |
|
SU1305834A1 |
| Полосовой пьезоэлектрический фильтр | 1990 |
|
SU1807555A1 |
| ИЗМЕРИТЕЛЬ ПАРАМЕТРОВ МНОГОЭЛЕМЕНТНЫХ ПАССИВНЫХ ДВУХПОЛЮСНИКОВ | 2009 |
|
RU2390787C1 |
Изобретение относится к радиотехнике и может использоваться для регулирования параметров частотно-избирательных устройств и моделировани нестационарных и нелинейных индуктив ностей. Известен индуктивный двухполюсник содержащий основную катушку индуктив ности, один из концов которой является первым полюсом двухполюсника, нерегулируемый дифференциальный усилитель, к выходу которого подключен другой конец основной катушки индуктивности, управляемый элемент, выпол ненный в виде управляемого дифференциального усилителя, инвертирующий и неинвертирующий входы которого подключены соответственно к первому полюсу индуктивного двухполюсника и выходу нерегулируемого дифференци.ального усилителя, сумматор, первый вход которого соединен с выходом управляемого элемента, дополнительную катушку индуктивности включенную между выходом сумматора и неинвертир щим входом нерегулируемого дифференциального усилителя, являющимся вторым полюсом индуктивного двухполюсника U.. однако этот индуктивный двухполюсник обладает сравнительно малым динамическим диапазоном имитируемой индуктивности. Цель изобретения - увеличение динамического диапазона имитируемой индуктивности . Для достижения ЭТОР цели в известном индуктивном двухполюснике, содержащем основную катушку индуктивности, один из концов которой является первым полюсом двухполюсника, нерегулируемый дифференциальный усилитель, к выходу которого подключен другой конец основной катушки индуктивности, управляемый элемент, выполненнЕлй в виде управляемого дифференциального усилителя, инвертирующий и неинвертирующий входы которого подк.пючены соответственно к первому полюсу индуктивного двухполюсника и выходу нерегулируемого дифференциального усилителя, сумматор, первый вход которого соединен с выходом управляемого элемента, дополнительную катушку индуктивности, включенную ме/аду выходом сумматора и неинвертирующим входом нерегулируемого дифференциального усилителя, являющимся вторым полюсом индуктивного двухполюсника
умматор выполнен в виде дифференциального усилителя, первый вход которого - цеинвертирующий, а второй инвертирующий и подсоединен к выходу нерегулируемого дифференциального усилителя, при этом инвертирующий вход нерегулируемого дифференциального усилителя соединен с выходом сумматора.
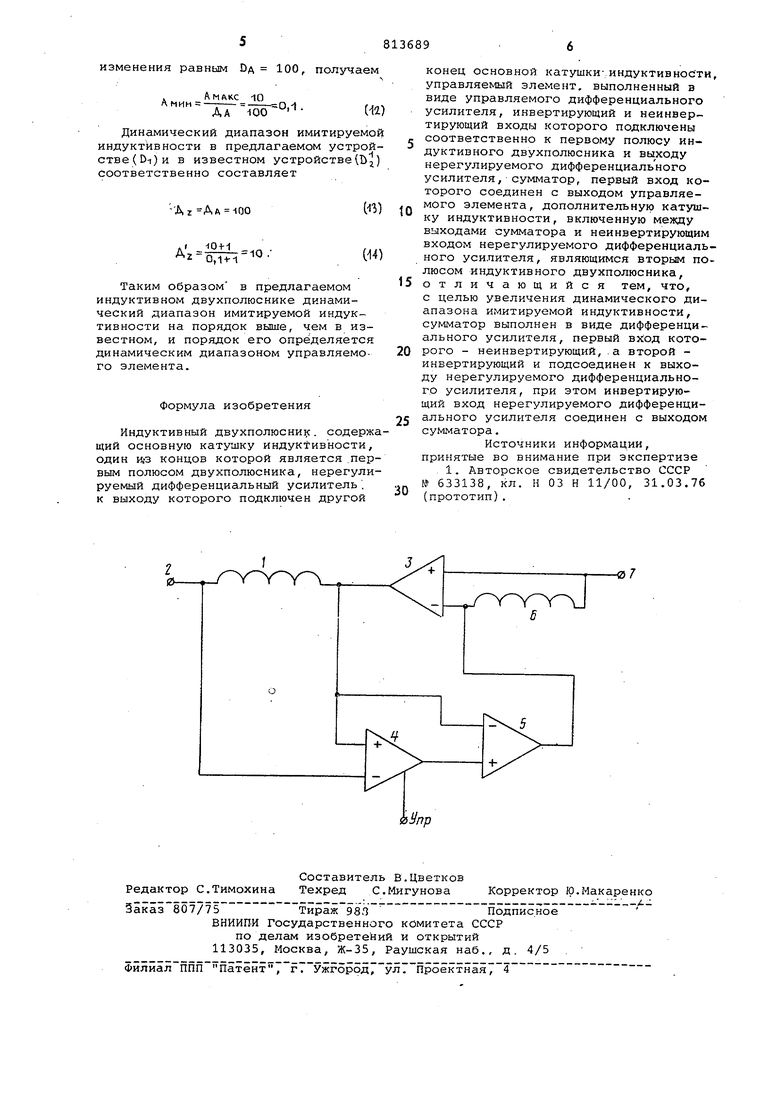
На чертеже представлена электрическая функциональная схема индуктивного двухполюсника.
Индуктивный двухполюсник содержит основную катушку 1 индуктивности, один из концов которой является перBtJM полюсом 2 двухполюсника, нерегулируемый дифференциальный усилитель 3, управляемый элемент 4, сумматор 5, дополнительную катушку б индуктивности, включенную между выходом сумматора 5 и неинвертирующим входом нерегулируемого дифференциального усилителя 3, являющимся вторым полюсом 7 индуктивного двухполюсника.
Индуктивный двухполюсник работает следующим образом.
Примем потенциал первого полюса 2 двухполюсника равным нулю. Сигнал
U-i равный падению напряжения на основной катушке 1 индуктивности, поступает на инвертирующий вход сумматора 5, имеющего, как и нере1улируемый дифференциальный усилитель 3, единичное усиление, и на неинвертирующий вход упрэ-вляемого элемента 4. В управляемом элементе 4 указанный сигнал и увеличивается в А раз (Л - коэффициент передачи управляемого элемента 4J , усиленный сигнал поступает на неинвертирующий вход сумматора 5, На выходе сумматора образуется сигнал и , равный разности сигналов на его входах:
Ui ли., - U-1 (А - l)U-( (1)
Сигнал Ui поступает на инвертирующий вход нерегулируемого дифференциального усилителя 3j на неинвертирующий вход которого поступает сигнал Uj со второго полюса 7 двухполюсника. На выходе усилителя 3 образуется сигнал и, равный разности сигналов на его входах:
(2)
U4 из гУчитывая, что выход нерегулируе-мого дифференциального усилителя 3 соединен с другим концом основной катушки 1 индуктивности, т, е. сигналы на выходе усилителя 3 и на втором выходе основной катушки 1
одинаковы, получаем
1
из Ui
С учетом 1 получаем g 1 (А - 1)-Ц из - А U-, -)- U (4
.i.
или
и
()
Напряжение U5 между полюсами дополнительной катушки 6 индуктивности определяется как
и, Uj- (Л - l)
Таким образом, напряжение на каждой из катушек индуктивности оказывается в А раз меньше напряжения между полюсами 2 и 7 двухполюсника. При этом ток через каждую из катушек в А раз меньше тока, который был бы в случае включения катушки между полюсами 2 и 7 индуктивного двухполюсника. Следовательно дей-ствующее значение индуктивного сопротивления и индуктивности между полюсами индуктивного двухполюсника оказываются увеличенными в А раз по сравнению с индуктивностью каждой из катушек. При переменном коэффициенте передачи управляемого элемента 4 имитируется переменная (управляемая,) индуктивность. При этом ток, протекающей через катушки, определяется потенциалами обоих полюсов 2 и 7 двухполюсника, следовательно, входное сопротивление двухполюсника является незаземленным.
Динамический диапазон D 2 имитируемой индуктивности определяется отношением максимальной имитируемой индуктивности к минимальной. В индуктивном двухполюснике имитируемая индуктивность njwjurHpсвязана с индуктивностью катушки 2 КАТ соотношением
Z имитир Z КАТ, Л. (7
Тогда динамический диапазон имитируемой индуктивности определяется как
д КДТ- КиАК .
(6) Z КАТ-А мин
В известном устройстве имитируемая индуктивность 2„„ |рвязана с индуктивностью катуижиг АТ соотношением
ZHHH.THP Z КАТ (А + 1 ) .
(9)
Тогда динамический диапазон имитируемой индуктивности определяется как
д к, MAKCt 1) AHfxKCti
10)
Z КАТ (А мин t-i
А MHHtH
. ЛМАКС
Дмин -:1
Ui)
Ал
где Dft- динамический диапазон изменения коэффициента передачи управляемого элемента 4. Принимая для определенности максимальный коэффициент передачи управляемого элемента 4 равнь:м A,c, 10, а динамический диапазон его
