1
Изобретение относится к области измерительной техники.
Известны цифровые приборы, осно- ванные на кодо-импульсном методе квантования с переменным шагом по уровню. Эти устройства при достаточном быстродействии квантования имеют значительное время уравновешивания ij
Наиболее близким по технической сущности к предлагаемому является устройство, ссдержащее нуль-орган, грубое и точное реле, генератор импульсов, триггер-делитель частоты, счетчик точной и грубой ступеней, дешифратор с. цифровыми индикаторами, цифровой потенциометр Хпреобразоватеяь код-аналог) . На один вход нульоргана поступает измеряемое напряжение иа другой вход поступает компенсирующее напряжение с цифрового потенциометра. На выходе нуль-органа подключены последовательно грубое и точное реле. Генератор импульсов через контакт грубого реле соединен со счетчиками грубой и точной ступеней, а через контакт точного реле и триггер-делитель частоты со счетчиком точной ступени, йдходы счетчиков сое.динены с дешифратором с цифровыми индикаторами и цифровым потенциометром 2j.
Известное устройство имеет сложную схему, обладает малым быстродействием и динамической погрешностью измерения. Так, в начальный период работы автокомпенсатора работают счетчики обеих ступеней, что увеличивает емкость счетчика точной ступени, а следовательно, и сложность дадифратора с цифровым индикатором и преобразователя код-аналог. Кроме того, время срабатывания реле сравнимо с быстродействием работы всего автокомпенсатора.
Цель изобретения - увеяичение быстродействия и повышение точности измерения.
Поставленная цель достигается тем, что цифровой автокомпенсатор с переменньлм шагами уравновешивания по уровню и времени, содержащий нуль-орган, первьЕй вход которого соединен с объектом измерения, генератор импульсов, счетчики точной и грубой ступеней, соединенные с цифровым индикатором и преобразователем код-аналог, выход которого соединен со вторым входом нуль-органа, снабжен пороговой схемой, усилителем-формирователем, двумя элементами запрет и инвертором, причем выход нуль-органа соединен с
входом усилителя-формирователя и входом пороговой схемы, выход которой подключен к входу инвертора и первому входу первого элемента запрета, второй вход которого соединен с выхсщом генератора импульсов и вторым входом второго элемента запрета, пер вый вход которого соединен с выходом инвертора, а. выход - с входом счетчика точной ступени, выход первого элемента запрета подключен к входу счетчина грубой ступени, вьаход усилителяформирователя соединен с входом генератора импульсов.
Введение перечисленных элементов позволяет исключить работу счетчика точной ступени в начальный период работы цифрового автокомпенсатора. Уменьшение быстродействия работы цифрового компенсатора при такой схеме исключается при помощи увеличения грубых шагов квантования компенсирующего напряжения на величину точных шагов квантования.
Исключение динамической погрешности- достигается при помощи соединения нуль-органа с входом генератоpa импульсов, .причем генератор импульсов управл яется напряжением. При этом частота генёратора импульсов эа висит от выходного напряжения нульоргана и по мере его уменьшения такж уменьшается. При выходном напряжеНИИ нуль-органа, равном нулю, частота генератора импульсов также равна нулю.
Увеличение быстродействия цифрового автокомпенсатора достигается вклю чением между нуль-органом и генератором импульсов усилителя-формирователя, осуществляющего управление ча-стотой генератора импульсов (F) по функциям (f).
F, f(KU°),
где и - напряжение на выходе нульоргана f
К - коэффициент передачи усилителя-формирователя j t - постоянная величина, большая единищз.
При таком законе управления увеличивается средняя частота генератора за период компенсации, что повышает быс родействие цифрового автркомпенсатора..
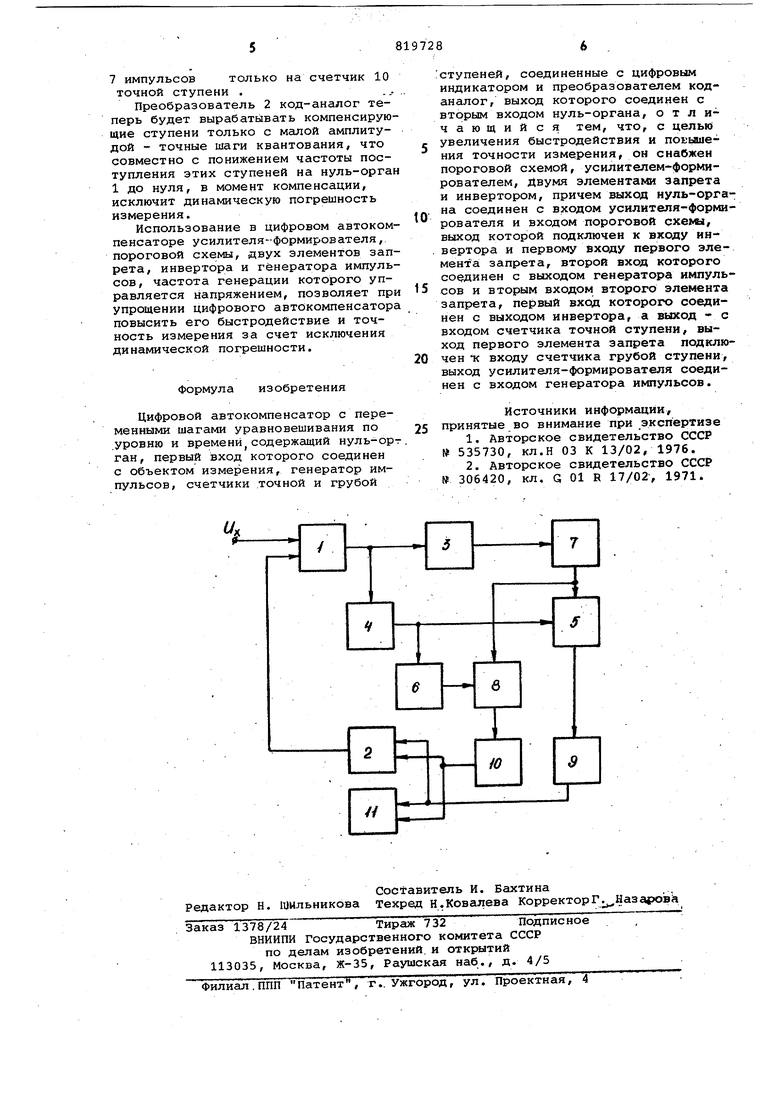
На чертеже изображена блок-схема предлагаемого цифрового автокомпен-, сатора.
Цифровой автокрмпенсатор с переменныЬ«1 шагами уравновешивания по уровню и времени содержит нуль-орган 1, на один вход которого подводится Й31мйряемое напряжение,. а на другой вход - компенсирукидее напряжение с выхода преобразователя 2 код-аналог. Выход нуль-органа 1 соединен с входами усилителя-Формирователя 3 и пороговой схемы 4, выход которой соедине
с элементом 5 запрета и инвертором 6 Выход усилителя-формирователя 3 соединен с входом генератора 7 импульсов, выход которого соединен с вторыми входами элемента 5 запрета и элемента 8 запрета, первый вход которого соединен с выходом инвертора б. йлхся элемента 5 запрета .соединен с счетчиком 9 грубой ступени, а элемент 8 запрета - с счетчиком 10 точной ступени. Выходы счетчиков обеих ступеней, например двоично-десятичны соединены с цифровым индикатором 11 и преобразователем 2 код-аналог.
Цифровой автокомпенсатор работает следуквдим образом.
В исходном состоянии компенсирующее напряжение на входе нуль-органа
1равно нулю,.напряжение на его выходе при этом имеет наибольшее значение, это наибольшее значение напряжения через усилитель-формирователь
3 поступает на генератор 7 импульсов который В Ьфабатывает напряжение наибольшей частот|л. Частота генератора импульсов через открытую пороговую схему 4, элемент 5 запрета, поступает на счетчик 9 грубой ступени. Счетчик управляет состоянием преобразователя
2код-аналог. При изменяющейся информации счетчика 9 грубой ступени преоб разоватёль 2 код-аналог вырабатывает компенсирующее напряжение только с большими шагами, амплитудой квантова.ния, вызывая уменьшение напряжения на выходе нуль-органа 1. Это уменьшающееся напряжение через усилитель-формирователь 3 уменьшает частоту генератора 7 импульсов, причем усилительформирователь 3 вырабатывает такое напряжение, при котором частота генератора меняется по закону, близкому к Fr.f (ки).
, Управление по такому закону почти не изменяет частоту генератора 7 при большой разнице между входными напряжениями нуль-органа 1 и резко уменьшает ее при подходе к моменту компенсации. При большой разнице между входными напряжениями нуль-органа 1 напряжение на его выходе практически постоянно. В момент компенсации частота генератора 7 импульсов равна нулю.
Выбранный закон управления при соответствующем выборе величин К л а, позволяет получить высокую среднюю частоту за период компенсации, что повышает быстродействие всего цифрового автокомпенсатора. При подходе к моменту компенсации сработает пороговая схема 4, она построена на напряжение, соответствующее величине одной грубой ступени. При этом на элемент 5 запрета будет подан запрет, а на элемент 8 запрета через инвертор б, наоборот - разрешение, что вызовет поступление частоты генератора
| название | год | авторы | номер документа |
|---|---|---|---|
| Аналого-цифровой преобразователь | 1982 |
|
SU1033974A1 |
| Многодиапазонное цифровое измерительное устройство для тензометрических весов | 1982 |
|
SU1044999A1 |
| ЦИФРОВОЙ ВОЛЬТМЕТР | 1970 |
|
SU277093A1 |
| Преобразователь угла поворота вала в код | 1980 |
|
SU942095A1 |
| Цифровое тензометрическое устройство для динамических измерений | 1982 |
|
SU1015258A1 |
| ЦИФРОВОЙ АВТОКОМПЕНСАТОР ДЛЯ ИЗМЕРЕНИЯ КОМПЛЕКСНЫХ ПАРАМЕТРОВ ПЕРЕМЕННОГО ТОКА | 1971 |
|
SU310388A1 |
| Цифровое тензометрическое устройство | 1983 |
|
SU1137322A1 |
| Автоматическое весоизмерительное устройство | 1981 |
|
SU974137A1 |
| АВТОМАТИЧЕСКИЙ КОМПЕНСАТОР ПЕРЕМЕННОГО ТОКА | 1971 |
|
SU310185A1 |
| Устройство для преобразования сигналов резистивных датчиков в цифровой код | 1973 |
|
SU481130A1 |
