(54) УСТРОЙСТВО ДИСТАНЦИОННОГО УПРАВЛЕНИЯ И КОНТРОЛЯ ДЛЯ КОНВЕЙЕРНОЙ ЛИНИИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Система дистанционного управления нагрузкой по силовой линии | 1988 |
|
SU1669046A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СИМИСТОРОМ | 1991 |
|
RU2028025C1 |
| Система шахтной искробезопасной громкоговорящей связи и предупредительной сигнализации | 1985 |
|
SU1314051A1 |
| КОМПЛЕКС АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ КОНВЕЙЕРАМИ | 2016 |
|
RU2657527C2 |
| Устройство для токовой защиты от повреждений в сети переменного тока | 1986 |
|
SU1520620A1 |
| Устройство для передачи сигналов управления в сети электроснабжения | 1991 |
|
SU1835553A1 |
| ТРЕХФАЗНЫЙ КОММУТАТОР | 2000 |
|
RU2192707C2 |
| Устройство тревожной сигнализации | 1978 |
|
SU863440A1 |
| Устройство для сварки | 1982 |
|
SU1123801A1 |
| ЭЛЕКТРОМАГНИТНЫЙ ПРИВОД КОММУТАЦИОННОГО АППАРАТА | 1994 |
|
RU2074430C1 |
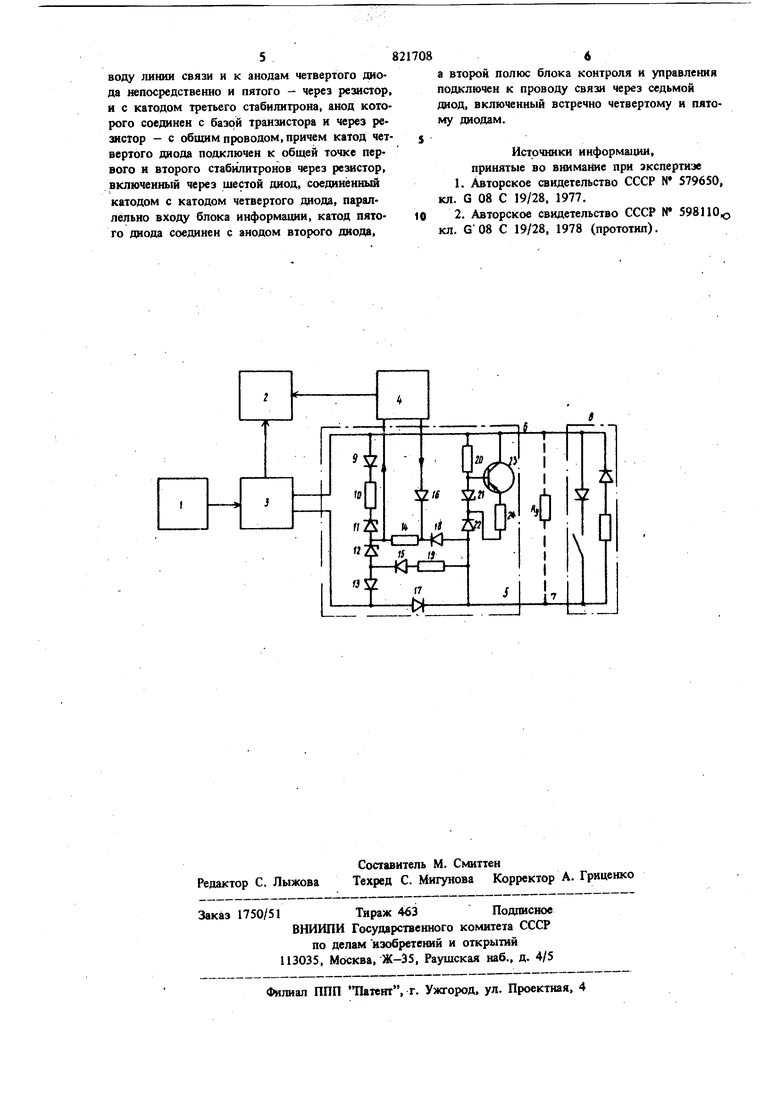
Изобретение относится к горной промышлек ности, а именно к устройствам автоматизации конвейерных линий. Известно устройство дистанционного управле ния и контроля, содержащее формирователь сигналов, блок контроля и управления, блок индикации и линии передачи 1. Это устройство не обеспечивает надежного управления и контроля конвейерной линии изза низкой помехоустойчивости. Известно устройство дистанционного управления и контроля для конвейерной линии, сод жащее формирователь сигналов, блок контроля и управления, блок приема информации, блок индикации, общий провод и провода связи линии передачи 2. Известное устройство в шахтных условиях из-за снижения сопротивления изоляции токовеДущих проводов линии передачи не обеспечивает надежной защиты от ложных срабатываний. Цель изобретения - повьпыение надежшсти контроля и управления за счет повышения помехоустойчивости устройства. Указанная цель достигается тем, что блок компенсации снабжен транзистором, семью дис дами, тремя стабилитронами и резисторами, объединенными в две компенсационные цепочки, включенные параллельно, первая из которых образована двумя последовательно включенными стабилитронами, катод одного из которых через резистор и встречно включенный первый диод соединен с общим проводом и с первым полюсом блока контроля и управления, а анод другого - через второй встречно включенный диод соединен со вторым полюсом блока контроля и управления, вторая компенсационная цепочка образована транзистором, коллектор которого соединен с общим проводом, эмиттер - через резистор с катодом третьего диода анод которого подключен к проводу линии связи и . к анодам четвертого диода непосредственно и пятого - через резистор, и с катодом третьего стабилитрона, анод которого соединен с базой транзистора и через резистор - с общим проводом, причём катод четвертого диода подключен к общей точке первого и второго стабилитронов через резистор, включенный через шее3той диод, соединенный катодом с катодом четвертого диода, параллельно входу блока информации, катод пятого диода соединен с анодом второго Диода, а второй полюс блока контроля и управления подключен к проводу связи через седьмой диод, включенный встречно четвертбму и пятому Диодам. На чертеже представлена блок-схема устройства. Устройство содержит формирователь 1 сигналов, блок 2 индикации блок 3 контроля и управления, блок 4 приема информации, блок S компенсации, общий провод 6 кабельной линии передачи, провод 7 Свяш линии передачи, зквивалент 8 нагрузки. Блок S компенсаюш содержит разделительный диод 9, резистор 10 компенсационной цепи, стабилитроны Пи 12, разделительный диод 13, нагрузочный резистор 14, разделительные диоды 15-17, диод 18 отсечки, ограничительный резистор 19, резистор 20 делителя, стабилитрон 21 делителя, разделительный диод 22, транзистор 23, ограничительный резистор 24. При работе устройства для дистанционного управления и контроля шахтным конвейерным транспортом формирователь 1 сигналов выдает (мнусоидальные однополупериодные сигналы частотой 50 Гц. Причем однополупериод- ;яый сигнал положительной полярности используется для йередачи сигналов управления, а однополупериодный сигнал отрицательной полярности - для контроля нагрузки 8. В исходном состоянии при отсутствии сигна лов управления в проводе 7 связи, траншстор 23 второй компенсационной цепи (включает элементы 20-24) открыт за счет отрицательного смещения на его багзе. Внутреннее сопро тивлёние зтой цепи в данном случае ниже сопротивления нагрузки 8, так что при наличии помех последние не проходят к нагрузке 8. Если в исходном состоянии шгнал помехи совпадает с сигналом контроля, то он выделит ся на первой компенсационной цепи (включает элементы 9-13). уровень ЭДС помехи ниже напряжеиия питания блока 4 приема информации. Поэтому разделительный диод 16 открыт, а диод 18 отсечки закрыт. ЭДС помехи поэтому не поступает в блок 4. При подаче сигнала управления на включение нагрузки 8 однопопупериодные импульсы положительной полярности пройдут по цепи: второй полюс блока 3 контроля к управления, привод 7 свяж линии передач, замкнутая часть нагрузки 8, общий провод 6, первый полюс блока 3 контроля и управления. После изменения состояния нагрузки 8 (вклю чение двигателей) замыкается ктШ разомкнутой части нагрузки 8, и однополупериодные импульсы отрицательной полярности пройдут ПО цепи: второй полюс блока 3 контроля управления, разделительный диод 13, стабилитрон 12, нагрузочный резистор 14, диод 18 отсечки, общий проводит кабельной линии передачи, замкнутый ключ с диодом нагрузки 8, провод 6 связи линии передачи, первый полюс блока 3 контроля и управления. При этом на резисторе 14 выделится напряжение. Так как это напряжение больше постоянного напряжения блока 4, то диод 16 закрывается, а диод 18 открывается. Поступившее постоянное напряжение с блока 4 приема информации запирается отрицательным пульсирующим, напряжением цепи 9- Ив случае, когда уровень его будет выше. В блоке 4 информации вьщелится пульсирующее напряжение, которое свидетельствует о приеме информации. При подаче сигнала управления пробивается стабилитрон 21, транзистор 23 закрывается. Внутреннее сопротивление второй компенса-. ционной цепи возрастает по сравнению с нагрузкой 8. Таким образом, при передаче сигнала управления вторая компенсационная цепь не реагирует на ЭДС помехи. После прекращения подачи сигнала управления вторая компенсационная цепь вновь включается в работу. Использование изобретения, в частности его компенсационных цепей, обеспечивает надежную помехозащищенность от ЭДС помех. Формула изобретения Устройство дистанционного управления и контроля для конвейерной линии, содержащее фop fиpoвaтeль сигналов, блок контроля и управления, блок приема информации, блок компенсации, блок индикации, общий провод и провода связи линии передачи, отличающееся тем, что, с целью повьш1еш1я надежности контроля и управления за счет повьпцения помехоустойчивости устройства, блок компенсации снабжен транзистором, семью даодами, тремя стабилитронами и резисторами, объедкнеш1Ь1МИ в две компенсационные цепочки, включенные параллельно, первая из которых образована двумя последовательно включенными стабилит ронами, катод одного из которых через резистор и встречно включенный первый диод соединен с общим проводом и с первым полюсом блока контроля и управления, а анод другого - через второй встречно включенные диод соединен со вторым полюсом блока контроля и управления, вторая компенсационная цепочка образована транзистором, коллектор которого, соединен с общим проводом, эмиттер - через резистор с катодом третьего диода, анод которого подключен к про5
воду линии связи и к анодам четвертого диода непосредственно и пятого - через резистор, и с катодом третьего стабилитрона, анод которого соединен с базой транзистора и через резистор - с общим проводом, причем катод четвертого диода подключен к общей точке первого и второго стабилитронов через резистор, включенный через щестой диод, соединённый катодом с катодом четвертого диода, параллельно входу блока информащ|и, катод пятого диода соединен с анодом второго диода.
I т 11- I-,t.
а второй полюс блока контроля и управления подключен к проводу связи через седьмой диод, включенный встречно четвертому и пятому диодам.
Источники информашш, принятые во внимание при экспертизе
SW
I
-,
i-Q.U
